 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Checklists Are Better Than Reward Models For Aligning Language Models
Jul 24, 2025



Language models must be adapted to understand and follow user instructions. Reinforcement learning is widely used to facilitate this -- typically using fixed criteria such as "helpfulness" and "harmfulness". In our work, we instead propose using flexible, instruction-specific criteria as a means of broadening the impact that reinforcement learning can have in eliciting instruction following. We propose "Reinforcement Learning from Checklist Feedback" (RLCF). From instructions, we extract checklists and evaluate how well responses satisfy each item - using both AI judges and specialized verifier programs - then combine these scores to compute rewards for RL. We compare RLCF with other alignment methods applied to a strong instruction following model (Qwen2.5-7B-Instruct) on five widely-studied benchmarks -- RLCF is the only method to improve performance on every benchmark, including a 4-point boost in hard satisfaction rate on FollowBench, a 6-point increase on InFoBench, and a 3-point rise in win rate on Arena-Hard. These results establish checklist feedback as a key tool for improving language models' support of queries that express a multitude of needs.
NTIRE 2025 Challenge on Event-Based Image Deblurring: Methods and Results
Apr 16, 2025This paper presents an overview of NTIRE 2025 the First Challenge on Event-Based Image Deblurring, detailing the proposed methodologies and corresponding results. The primary goal of the challenge is to design an event-based method that achieves high-quality image deblurring, with performance quantitatively assessed using Peak Signal-to-Noise Ratio (PSNR). Notably, there are no restrictions on computational complexity or model size. The task focuses on leveraging both events and images as inputs for single-image deblurring. A total of 199 participants registered, among whom 15 teams successfully submitted valid results, offering valuable insights into the current state of event-based image deblurring. We anticipate that this challenge will drive further advancements in event-based vision research.
Step-by-Step Reasoning for Math Problems via Twisted Sequential Monte Carlo
Oct 02, 2024



Augmenting the multi-step reasoning abilities of Large Language Models (LLMs) has been a persistent challenge. Recently, verification has shown promise in improving solution consistency by evaluating generated outputs. However, current verification approaches suffer from sampling inefficiencies, requiring a large number of samples to achieve satisfactory performance. Additionally, training an effective verifier often depends on extensive process supervision, which is costly to acquire. In this paper, we address these limitations by introducing a novel verification method based on Twisted Sequential Monte Carlo (TSMC). TSMC sequentially refines its sampling effort to focus exploration on promising candidates, resulting in more efficient generation of high-quality solutions. We apply TSMC to LLMs by estimating the expected future rewards at partial solutions. This approach results in a more straightforward training target that eliminates the need for step-wise human annotations. We empirically demonstrate the advantages of our method across multiple math benchmarks, and also validate our theoretical analysis of both our approach and existing verification methods.
ToolSandbox: A Stateful, Conversational, Interactive Evaluation Benchmark for LLM Tool Use Capabilities
Aug 08, 2024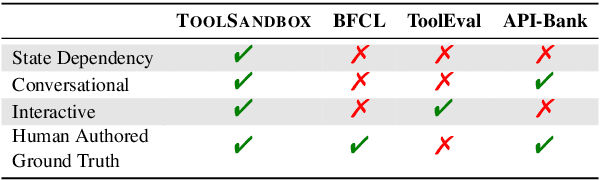
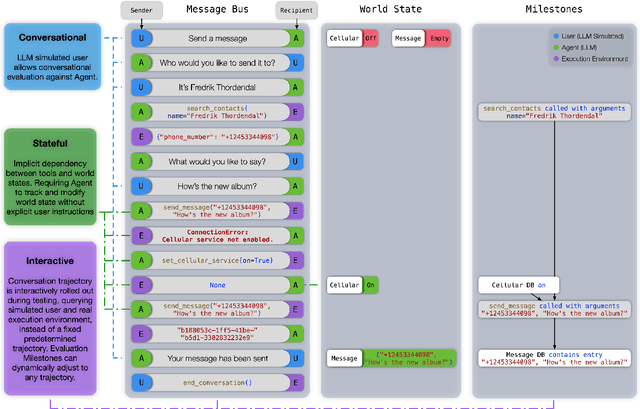
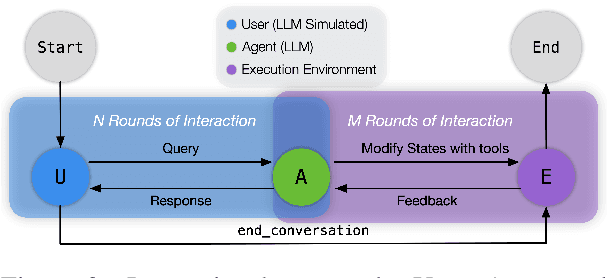
Recent large language models (LLMs) advancements sparked a growing research interest in tool assisted LLMs solving real-world challenges, which calls for comprehensive evaluation of tool-use capabilities. While previous works focused on either evaluating over stateless web services (RESTful API), based on a single turn user prompt, or an off-policy dialog trajectory, ToolSandbox includes stateful tool execution, implicit state dependencies between tools, a built-in user simulator supporting on-policy conversational evaluation and a dynamic evaluation strategy for intermediate and final milestones over an arbitrary trajectory. We show that open source and proprietary models have a significant performance gap, and complex tasks like State Dependency, Canonicalization and Insufficient Information defined in ToolSandbox are challenging even the most capable SOTA LLMs, providing brand-new insights into tool-use LLM capabilities. ToolSandbox evaluation framework is released at https://github.com/apple/ToolSandbox
Apple Intelligence Foundation Language Models
Jul 29, 2024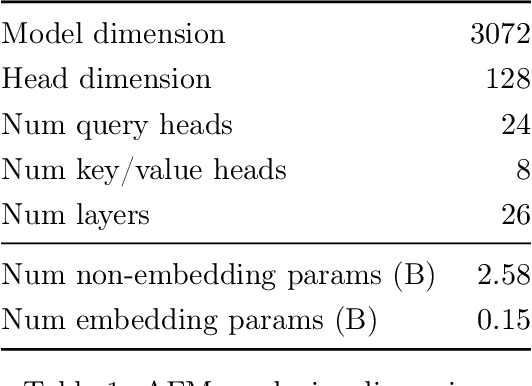
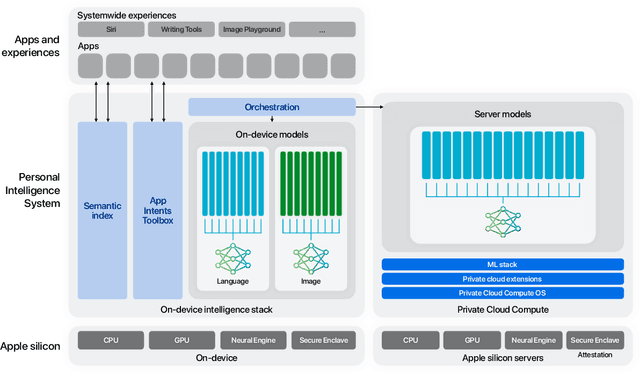

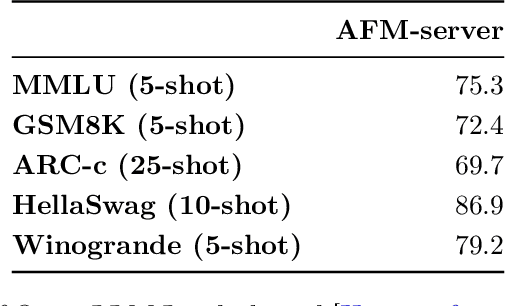
We present foundation language models developed to power Apple Intelligence features, including a ~3 billion parameter model designed to run efficiently on devices and a large server-based language model designed for Private Cloud Compute. These models are designed to perform a wide range of tasks efficiently, accurately, and responsibly. This report describes the model architecture, the data used to train the model, the training process, how the models are optimized for inference, and the evaluation results. We highlight our focus on Responsible AI and how the principles are applied throughout the model development.
Premier-TACO is a Few-Shot Policy Learner: Pretraining Multitask Representation via Temporal Action-Driven Contrastive Loss
Feb 13, 2024



We present Premier-TACO, a multitask feature representation learning approach designed to improve few-shot policy learning efficiency in sequential decision-making tasks. Premier-TACO leverages a subset of multitask offline datasets for pretraining a general feature representation, which captures critical environmental dynamics and is fine-tuned using minimal expert demonstrations. It advances the temporal action contrastive learning (TACO) objective, known for state-of-the-art results in visual control tasks, by incorporating a novel negative example sampling strategy. This strategy is crucial in significantly boosting TACO's computational efficiency, making large-scale multitask offline pretraining feasible. Our extensive empirical evaluation in a diverse set of continuous control benchmarks including Deepmind Control Suite, MetaWorld, and LIBERO demonstrate Premier-TACO's effectiveness in pretraining visual representations, significantly enhancing few-shot imitation learning of novel tasks. Our code, pretraining data, as well as pretrained model checkpoints will be released at https://github.com/PremierTACO/premier-taco. Our project webpage is at https://premiertaco.github.io.
Is Imitation All You Need? Generalized Decision-Making with Dual-Phase Training
Jul 18, 2023



We introduce DualMind, a generalist agent designed to tackle various decision-making tasks that addresses challenges posed by current methods, such as overfitting behaviors and dependence on task-specific fine-tuning. DualMind uses a novel "Dual-phase" training strategy that emulates how humans learn to act in the world. The model first learns fundamental common knowledge through a self-supervised objective tailored for control tasks and then learns how to make decisions based on different contexts through imitating behaviors conditioned on given prompts. DualMind can handle tasks across domains, scenes, and embodiments using just a single set of model weights and can execute zero-shot prompting without requiring task-specific fine-tuning. We evaluate DualMind on MetaWorld and Habitat through extensive experiments and demonstrate its superior generalizability compared to previous techniques, outperforming other generalist agents by over 50$\%$ and 70$\%$ on Habitat and MetaWorld, respectively. On the 45 tasks in MetaWorld, DualMind achieves over 30 tasks at a 90$\%$ success rate.
TACO: Temporal Latent Action-Driven Contrastive Loss for Visual Reinforcement Learning
Jun 22, 2023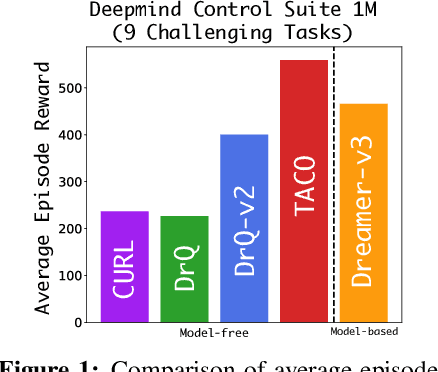



Despite recent progress in reinforcement learning (RL) from raw pixel data, sample inefficiency continues to present a substantial obstacle. Prior works have attempted to address this challenge by creating self-supervised auxiliary tasks, aiming to enrich the agent's learned representations with control-relevant information for future state prediction. However, these objectives are often insufficient to learn representations that can represent the optimal policy or value function, and they often consider tasks with small, abstract discrete action spaces and thus overlook the importance of action representation learning in continuous control. In this paper, we introduce TACO: Temporal Action-driven Contrastive Learning, a simple yet powerful temporal contrastive learning approach that facilitates the concurrent acquisition of latent state and action representations for agents. TACO simultaneously learns a state and an action representation by optimizing the mutual information between representations of current states paired with action sequences and representations of the corresponding future states. Theoretically, TACO can be shown to learn state and action representations that encompass sufficient information for control, thereby improving sample efficiency. For online RL, TACO achieves 40% performance boost after one million environment interaction steps on average across nine challenging visual continuous control tasks from Deepmind Control Suite. In addition, we show that TACO can also serve as a plug-and-play module adding to existing offline visual RL methods to establish the new state-of-the-art performance for offline visual RL across offline datasets with varying quality.
SMART: Self-supervised Multi-task pretrAining with contRol Transformers
Jan 24, 2023



Self-supervised pretraining has been extensively studied in language and vision domains, where a unified model can be easily adapted to various downstream tasks by pretraining representations without explicit labels. When it comes to sequential decision-making tasks, however, it is difficult to properly design such a pretraining approach that can cope with both high-dimensional perceptual information and the complexity of sequential control over long interaction horizons. The challenge becomes combinatorially more complex if we want to pretrain representations amenable to a large variety of tasks. To tackle this problem, in this work, we formulate a general pretraining-finetuning pipeline for sequential decision making, under which we propose a generic pretraining framework \textit{Self-supervised Multi-task pretrAining with contRol Transformer (SMART)}. By systematically investigating pretraining regimes, we carefully design a Control Transformer (CT) coupled with a novel control-centric pretraining objective in a self-supervised manner. SMART encourages the representation to capture the common essential information relevant to short-term control and long-term control, which is transferrable across tasks. We show by extensive experiments in DeepMind Control Suite that SMART significantly improves the learning efficiency among seen and unseen downstream tasks and domains under different learning scenarios including Imitation Learning (IL) and Reinforcement Learning (RL). Benefiting from the proposed control-centric objective, SMART is resilient to distribution shift between pretraining and finetuning, and even works well with low-quality pretraining datasets that are randomly collected.