 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePremier-TACO is a Few-Shot Policy Learner: Pretraining Multitask Representation via Temporal Action-Driven Contrastive Loss
Feb 13, 2024



We present Premier-TACO, a multitask feature representation learning approach designed to improve few-shot policy learning efficiency in sequential decision-making tasks. Premier-TACO leverages a subset of multitask offline datasets for pretraining a general feature representation, which captures critical environmental dynamics and is fine-tuned using minimal expert demonstrations. It advances the temporal action contrastive learning (TACO) objective, known for state-of-the-art results in visual control tasks, by incorporating a novel negative example sampling strategy. This strategy is crucial in significantly boosting TACO's computational efficiency, making large-scale multitask offline pretraining feasible. Our extensive empirical evaluation in a diverse set of continuous control benchmarks including Deepmind Control Suite, MetaWorld, and LIBERO demonstrate Premier-TACO's effectiveness in pretraining visual representations, significantly enhancing few-shot imitation learning of novel tasks. Our code, pretraining data, as well as pretrained model checkpoints will be released at https://github.com/PremierTACO/premier-taco. Our project webpage is at https://premiertaco.github.io.
Autonomous Advanced Aerial Mobility -- An End-to-end Autonomy Framework for UAVs and Beyond
Nov 08, 2023



Developing aerial robots that can both safely navigate and execute assigned mission without any human intervention - i.e., fully autonomous aerial mobility of passengers and goods - is the larger vision that guides the research, design, and development efforts in the aerial autonomy space. However, it is highly challenging to concurrently operationalize all types of aerial vehicles that are operating fully autonomously sharing the airspace. Full autonomy of the aerial transportation sector includes several aspects, such as design of the technology that powers the vehicles, operations of multi-agent fleets, and process of certification that meets stringent safety requirements of aviation sector. Thereby, Autonomous Advanced Aerial Mobility is still a vague term and its consequences for researchers and professionals are ambiguous. To address this gap, we present a comprehensive perspective on the emerging field of autonomous advanced aerial mobility, which involves the use of unmanned aerial vehicles (UAVs) and electric vertical takeoff and landing (eVTOL) aircraft for various applications, such as urban air mobility, package delivery, and surveillance. The article proposes a scalable and extensible autonomy framework consisting of four main blocks: sensing, perception, planning, and controls. Furthermore, the article discusses the challenges and opportunities in multi-agent fleet operations and management, as well as the testing, validation, and certification aspects of autonomous aerial systems. Finally, the article explores the potential of monolithic models for aerial autonomy and analyzes their advantages and limitations. The perspective aims to provide a holistic picture of the autonomous advanced aerial mobility field and its future directions.
Scalable Modular Synthetic Data Generation for Advancing Aerial Autonomy
Nov 10, 2022



Harnessing the benefits of drones for urban innovation at scale requires reliable aerial autonomy. One major barrier to advancing aerial autonomy has been collecting large-scale aerial datasets for training machine learning models. Due to costly and time-consuming real-world data collection through deploying drones, there has been an increasing shift towards using synthetic data for training models in drone applications. However, to increase generalizability of trained policies on synthetic data, incorporating domain randomization into the data generation workflow for addressing the sim-to-real problem becomes crucial. Current synthetic data generation tools either lack domain randomization or rely heavily on manual workload or real samples for configuring and generating diverse realistic simulation scenes. These dependencies limit scalability of the data generation workflow. Accordingly, there is a major challenge in balancing generalizability and scalability in synthetic data generation. To address these gaps, we introduce a modular scalable data generation workflow tailored to aerial autonomy applications. To generate realistic configurations of simulation scenes while increasing diversity, we present an adaptive layered domain randomization approach that creates a type-agnostic distribution space for assets over the base map of the environments before pose generation for drone trajectory. We leverage high-level scene structures to automatically place assets in valid configurations and then extend the diversity through obstacle generation and global parameter randomization. We demonstrate the effectiveness of our method in automatically generating diverse configurations and datasets and show its potential for downstream performance optimization. Our work contributes to generating enhanced benchmark datasets for training models that can generalize better to real-world situations.
Multi-Agent Connected Autonomous Driving using Deep Reinforcement Learning
Nov 11, 2019
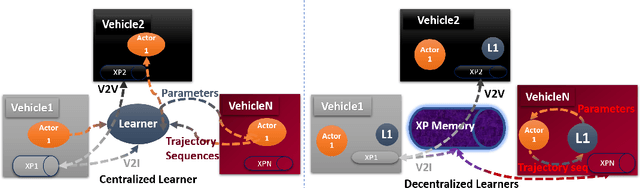

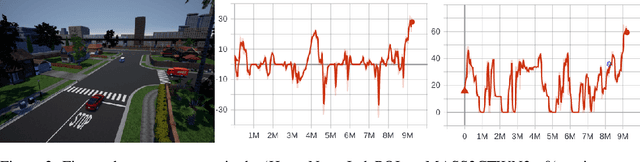
The capability to learn and adapt to changes in the driving environment is crucial for developing autonomous driving systems that are scalable beyond geo-fenced operational design domains. Deep Reinforcement Learning (RL) provides a promising and scalable framework for developing adaptive learning based solutions. Deep RL methods usually model the problem as a (Partially Observable) Markov Decision Process in which an agent acts in a stationary environment to learn an optimal behavior policy. However, driving involves complex interaction between multiple, intelligent (artificial or human) agents in a highly non-stationary environment. In this paper, we propose the use of Partially Observable Markov Games(POSG) for formulating the connected autonomous driving problems with realistic assumptions. We provide a taxonomy of multi-agent learning environments based on the nature of tasks, nature of agents and the nature of the environment to help in categorizing various autonomous driving problems that can be addressed under the proposed formulation. As our main contributions, we provide MACAD-Gym, a Multi-Agent Connected, Autonomous Driving agent learning platform for furthering research in this direction. Our MACAD-Gym platform provides an extensible set of Connected Autonomous Driving (CAD) simulation environments that enable the research and development of Deep RL- based integrated sensing, perception, planning and control algorithms for CAD systems with unlimited operational design domain under realistic, multi-agent settings. We also share the MACAD-Agents that were trained successfully using the MACAD-Gym platform to learn control policies for multiple vehicle agents in a partially observable, stop-sign controlled, 3-way urban intersection environment with raw (camera) sensor observations.
An Integrated Multi-Time-Scale Modeling for Solar Irradiance Forecasting Using Deep Learning
May 07, 2019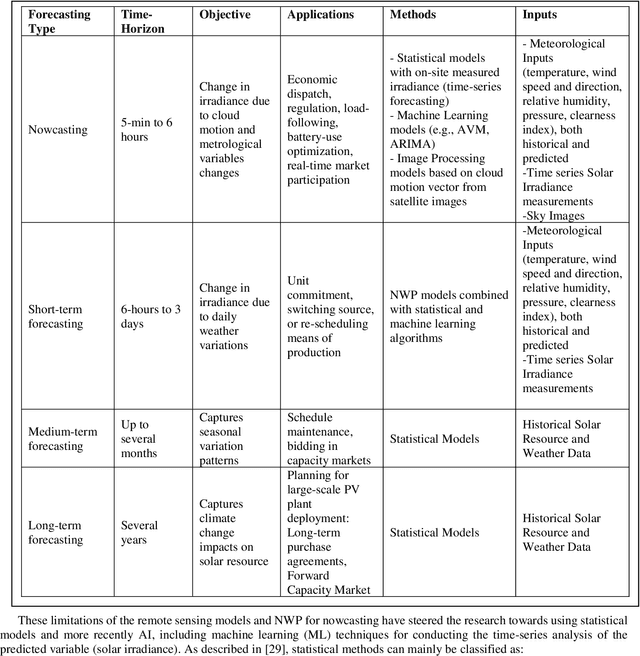
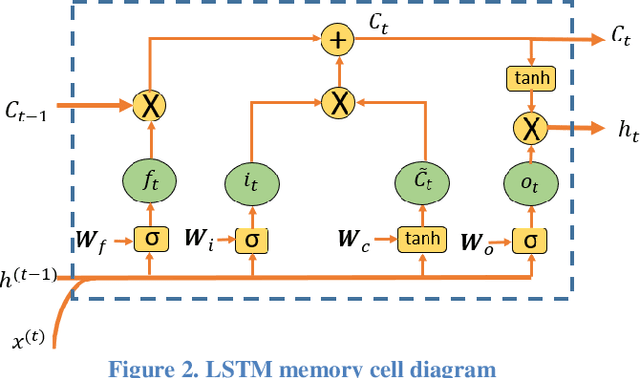
The amount of energy generation from renewable energy sources, particularly from wind and photovoltaic plants, has seen a rapid rise in the last decade. Reliable and economic operation of power systems thus requires an accurate estimate of the power generated from renewable generation plants, particularly those that are intermittent in nature. This has accentuated the need to find an efficient and scalable scheme for forecasting meteorological parameters, such as solar radiation, with better accuracy. For short-term solar irradiance forecasting, the traditional point forecasting methods are rendered less useful due to the non-stationary characteristic of solar power. In this research work, we propose a unified architecture for multi-time-scale predictions for intra-day solar irradiance forecasting using recurrent neural networks (RNN) and long-short-term memory networks (LSTMs). This paper also lays out a framework for extending this modeling approach to intra-hour forecasting horizons, thus making it a multi-time-horizon forecasting approach capable of predicting intra-hour as well as intra-day solar irradiance. We develop an end-to-end pipeline to effectuate the proposed architecture. The robustness of the approach is demonstrated with case studies conducted for geographically scattered sites across the United States. The predictions demonstrate that our proposed unified architecture based approach is effective for multi-time-scale solar forecasts and achieves a lower root-mean-square prediction error when benchmarked against the best-performing methods documented in the literature that use separate models for each time-scale during the day. The proposed method enables multi-time-horizon forecasts with real-time inputs, which have a significant potential for practical industry applications in the evolving grid.
Learning On-Road Visual Control for Self-Driving Vehicles with Auxiliary Tasks
Dec 19, 2018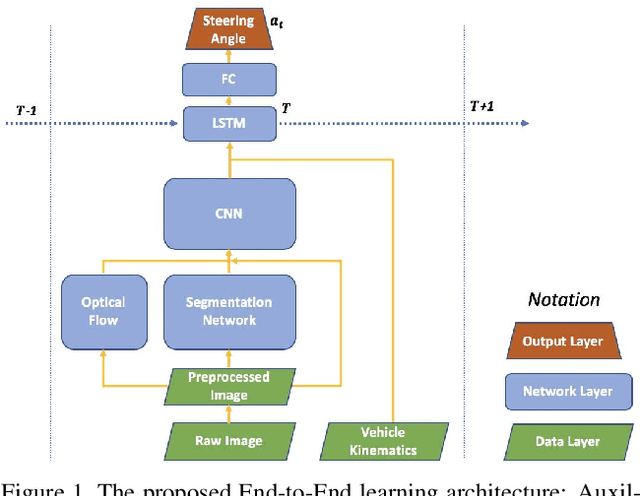
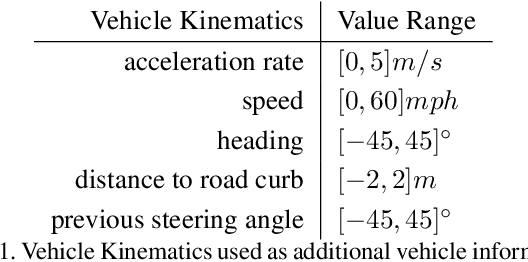
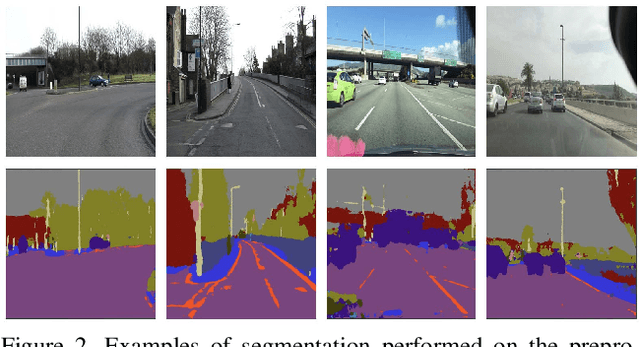
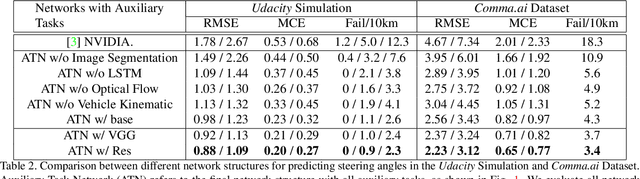
A safe and robust on-road navigation system is a crucial component of achieving fully automated vehicles. NVIDIA recently proposed an End-to-End algorithm that can directly learn steering commands from raw pixels of a front camera by using one convolutional neural network. In this paper, we leverage auxiliary information aside from raw images and design a novel network structure, called Auxiliary Task Network (ATN), to help boost the driving performance while maintaining the advantage of minimal training data and an End-to-End training method. In this network, we introduce human prior knowledge into vehicle navigation by transferring features from image recognition tasks. Image semantic segmentation is applied as an auxiliary task for navigation. We consider temporal information by introducing an LSTM module and optical flow to the network. Finally, we combine vehicle kinematics with a sensor fusion step. We discuss the benefits of our method over state-of-the-art visual navigation methods both in the Udacity simulation environment and on the real-world Comma.ai dataset.
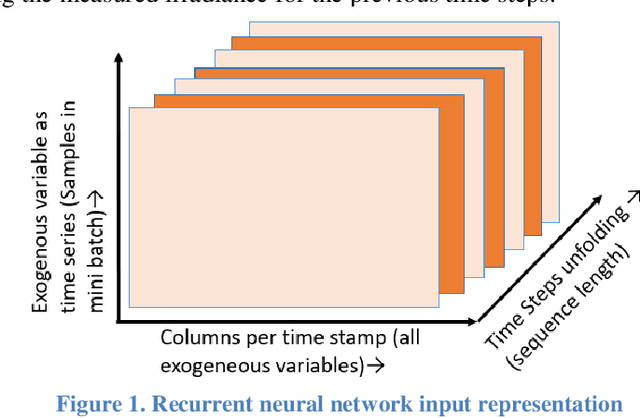
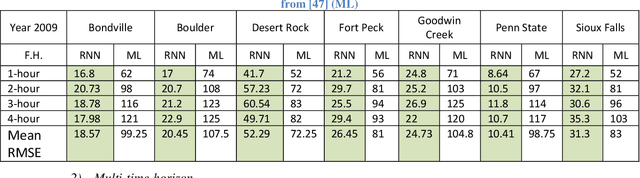
Multi-time-horizon Solar Forecasting Using Recurrent Neural Network
Jul 14, 2018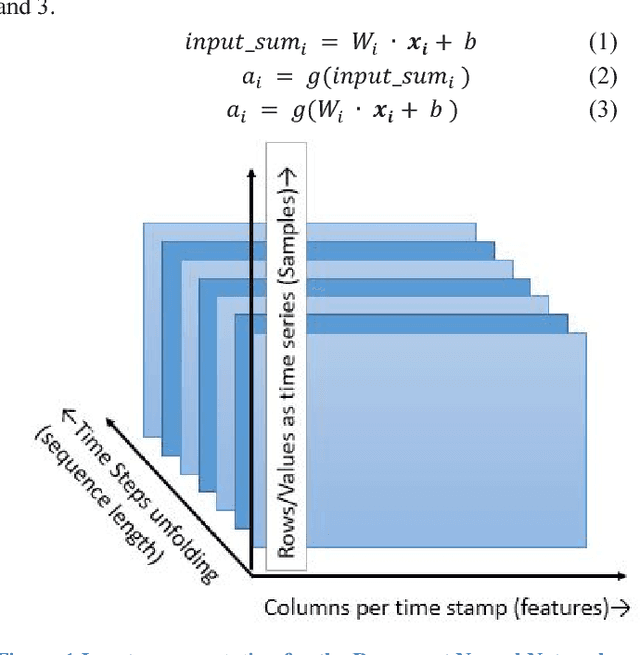
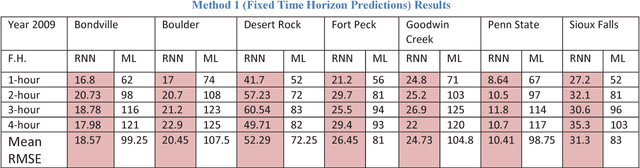
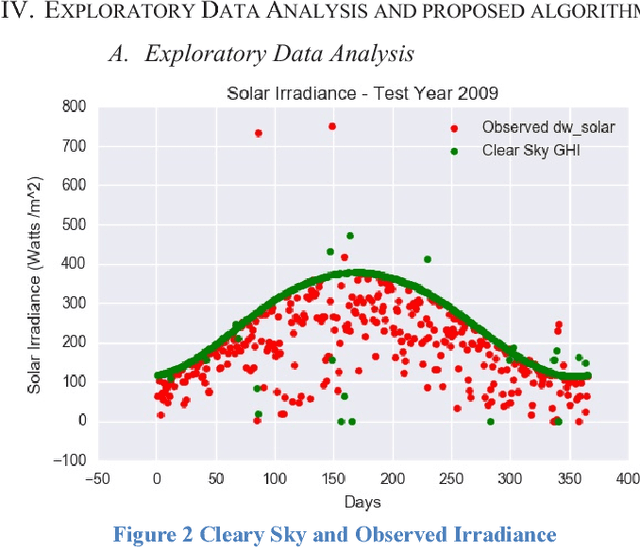
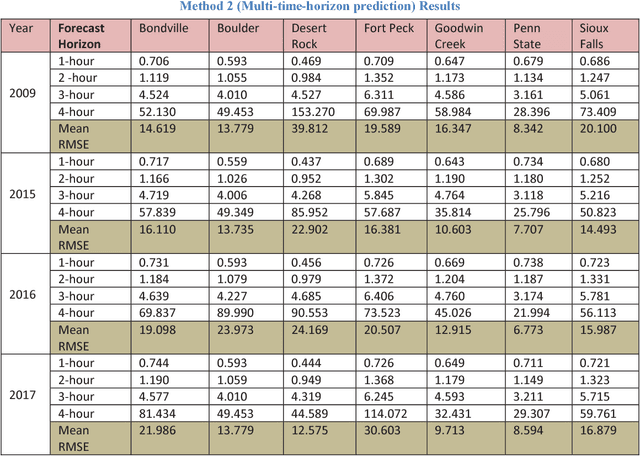
The non-stationarity characteristic of the solar power renders traditional point forecasting methods to be less useful due to large prediction errors. This results in increased uncertainties in the grid operation, thereby negatively affecting the reliability and increased cost of operation. This research paper proposes a unified architecture for multi-time-horizon predictions for short and long-term solar forecasting using Recurrent Neural Networks (RNN). The paper describes an end-to-end pipeline to implement the architecture along with the methods to test and validate the performance of the prediction model. The results demonstrate that the proposed method based on the unified architecture is effective for multi-horizon solar forecasting and achieves a lower root-mean-squared prediction error compared to the previous best-performing methods which use one model for each time-horizon. The proposed method enables multi-horizon forecasts with real-time inputs, which have a high potential for practical applications in the evolving smart grid.