 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Advanced Aerial Mobility -- An End-to-end Autonomy Framework for UAVs and Beyond
Nov 08, 2023



Developing aerial robots that can both safely navigate and execute assigned mission without any human intervention - i.e., fully autonomous aerial mobility of passengers and goods - is the larger vision that guides the research, design, and development efforts in the aerial autonomy space. However, it is highly challenging to concurrently operationalize all types of aerial vehicles that are operating fully autonomously sharing the airspace. Full autonomy of the aerial transportation sector includes several aspects, such as design of the technology that powers the vehicles, operations of multi-agent fleets, and process of certification that meets stringent safety requirements of aviation sector. Thereby, Autonomous Advanced Aerial Mobility is still a vague term and its consequences for researchers and professionals are ambiguous. To address this gap, we present a comprehensive perspective on the emerging field of autonomous advanced aerial mobility, which involves the use of unmanned aerial vehicles (UAVs) and electric vertical takeoff and landing (eVTOL) aircraft for various applications, such as urban air mobility, package delivery, and surveillance. The article proposes a scalable and extensible autonomy framework consisting of four main blocks: sensing, perception, planning, and controls. Furthermore, the article discusses the challenges and opportunities in multi-agent fleet operations and management, as well as the testing, validation, and certification aspects of autonomous aerial systems. Finally, the article explores the potential of monolithic models for aerial autonomy and analyzes their advantages and limitations. The perspective aims to provide a holistic picture of the autonomous advanced aerial mobility field and its future directions.
Decentralization of Energy Systems with Blockchain: Bridging Top-down and Bottom-up Management of the Electricity Grid
Oct 11, 2023For more than a century, the grid has operated in a centralized top-down fashion. However, as distributed energy resources (DERs) penetration grows, the grid edge is increasingly infused with intelligent computing and communication capabilities. Thus, the bottom-up approach to grid operations inclined toward decentralizing energy systems will likely gain momentum alongside the existing centralized paradigm. Decentralization refers to transferring control and decision-making from a centralized entity (individual, organization, or group thereof) to a distributed network. It is not a new concept - in energy systems context or otherwise. In the energy systems context, however, the complexity of this multifaceted concept increases manifolds due to two major reasons - i) the nature of the commodity being traded (the electricity) and ii) the enormity of the traditional electricity sector's structure that builds, operates, and maintains this capital-intensive network. In this work, we aim to highlight the need for and outline a credible path toward restructuring the current operational architecture of the electricity grid in view of the ongoing decentralization trends with an emphasis on peer-to-peer energy trading. We further introduce blockchain technology in the context of decentralized energy systems problems. We also suggest that blockchain is an effective technology for facilitating the synergistic operations of top-down and bottom-up approaches to grid management.
Scalable Modular Synthetic Data Generation for Advancing Aerial Autonomy
Nov 10, 2022



Harnessing the benefits of drones for urban innovation at scale requires reliable aerial autonomy. One major barrier to advancing aerial autonomy has been collecting large-scale aerial datasets for training machine learning models. Due to costly and time-consuming real-world data collection through deploying drones, there has been an increasing shift towards using synthetic data for training models in drone applications. However, to increase generalizability of trained policies on synthetic data, incorporating domain randomization into the data generation workflow for addressing the sim-to-real problem becomes crucial. Current synthetic data generation tools either lack domain randomization or rely heavily on manual workload or real samples for configuring and generating diverse realistic simulation scenes. These dependencies limit scalability of the data generation workflow. Accordingly, there is a major challenge in balancing generalizability and scalability in synthetic data generation. To address these gaps, we introduce a modular scalable data generation workflow tailored to aerial autonomy applications. To generate realistic configurations of simulation scenes while increasing diversity, we present an adaptive layered domain randomization approach that creates a type-agnostic distribution space for assets over the base map of the environments before pose generation for drone trajectory. We leverage high-level scene structures to automatically place assets in valid configurations and then extend the diversity through obstacle generation and global parameter randomization. We demonstrate the effectiveness of our method in automatically generating diverse configurations and datasets and show its potential for downstream performance optimization. Our work contributes to generating enhanced benchmark datasets for training models that can generalize better to real-world situations.
Deep Learning Based Load Forecasting: from Research to Deployment -- Opportunities and Challenges
Aug 12, 2020


Electricity load forecasting for buildings and campuses is becoming increasingly important as the penetration of distributed energy resources grows. Efficient operation and dispatch of DERs requires reasonably accurate prediction of future energy consumption in order to conduct near-real-time optimized dispatch of on-site generation and storage assets. Load forecasting has traditionally been done by electric utilities for load pockets spanning large geographic areas and therefore has not been a common practice in the buildings' and campuses' operational arena. Given the growing trends of research and prototyping in the grid-interactive efficient buildings domain, characteristics beyond simple algorithm forecast accuracy are important in determining the algorithm's true utility for the smart buildings. These other characteristics include the overall design of the deployed architecture and the operational efficiency of the forecasting system. In this work, we present a deep-learning-based load forecasting system that predicts the building load at one-hour interval for 18 hours in the future. We also present the challenges associated with the real-time deployment of such systems as well as the research opportunities presented by a fully functional forecasting system that has been developed within the National Renewable Energy Laboratory's Intelligent Campus program.
An Integrated Multi-Time-Scale Modeling for Solar Irradiance Forecasting Using Deep Learning
May 07, 2019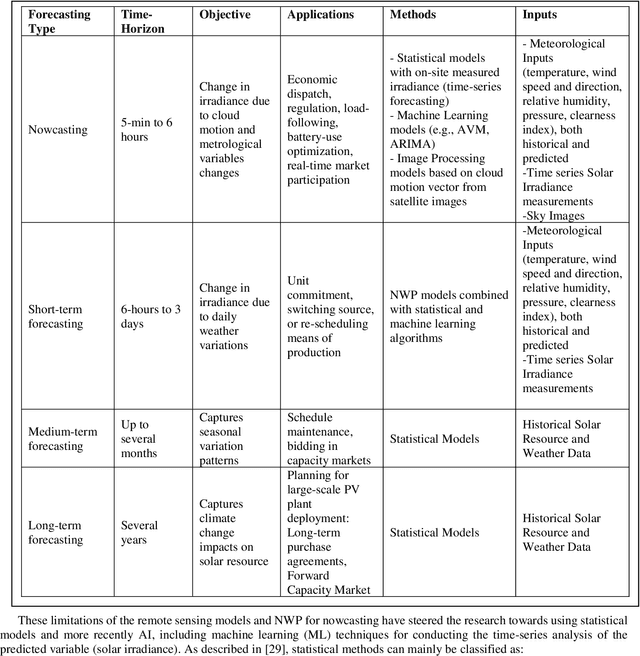
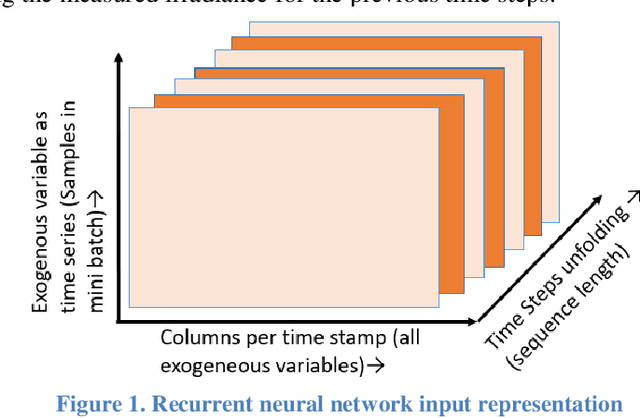
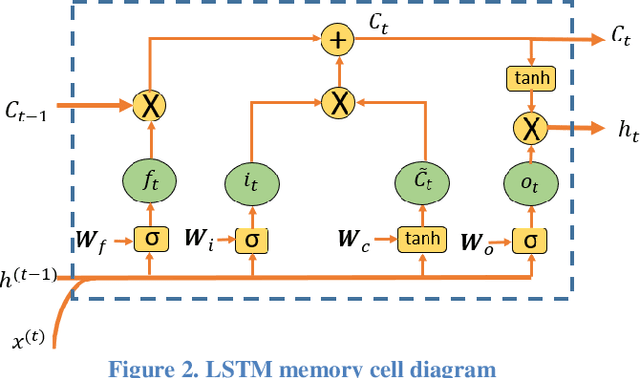
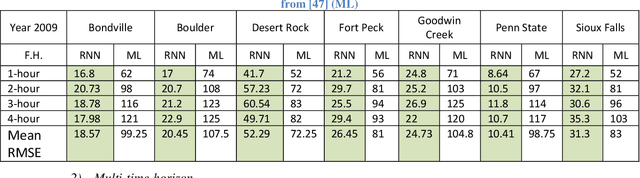
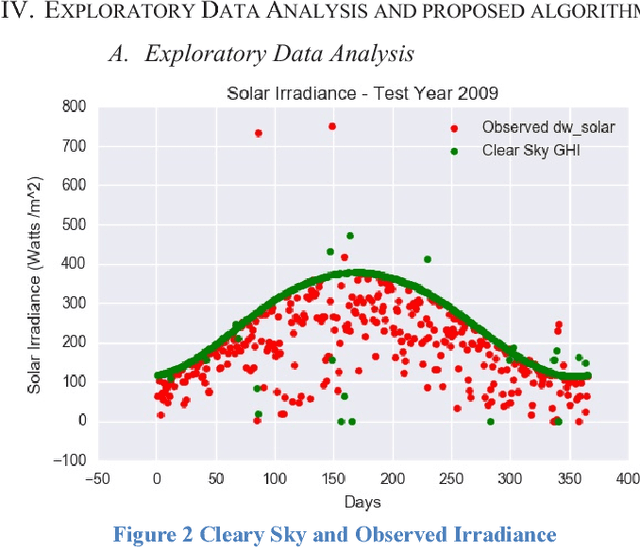
The amount of energy generation from renewable energy sources, particularly from wind and photovoltaic plants, has seen a rapid rise in the last decade. Reliable and economic operation of power systems thus requires an accurate estimate of the power generated from renewable generation plants, particularly those that are intermittent in nature. This has accentuated the need to find an efficient and scalable scheme for forecasting meteorological parameters, such as solar radiation, with better accuracy. For short-term solar irradiance forecasting, the traditional point forecasting methods are rendered less useful due to the non-stationary characteristic of solar power. In this research work, we propose a unified architecture for multi-time-scale predictions for intra-day solar irradiance forecasting using recurrent neural networks (RNN) and long-short-term memory networks (LSTMs). This paper also lays out a framework for extending this modeling approach to intra-hour forecasting horizons, thus making it a multi-time-horizon forecasting approach capable of predicting intra-hour as well as intra-day solar irradiance. We develop an end-to-end pipeline to effectuate the proposed architecture. The robustness of the approach is demonstrated with case studies conducted for geographically scattered sites across the United States. The predictions demonstrate that our proposed unified architecture based approach is effective for multi-time-scale solar forecasts and achieves a lower root-mean-square prediction error when benchmarked against the best-performing methods documented in the literature that use separate models for each time-scale during the day. The proposed method enables multi-time-horizon forecasts with real-time inputs, which have a significant potential for practical industry applications in the evolving grid.
Multi-time-horizon Solar Forecasting Using Recurrent Neural Network
Jul 14, 2018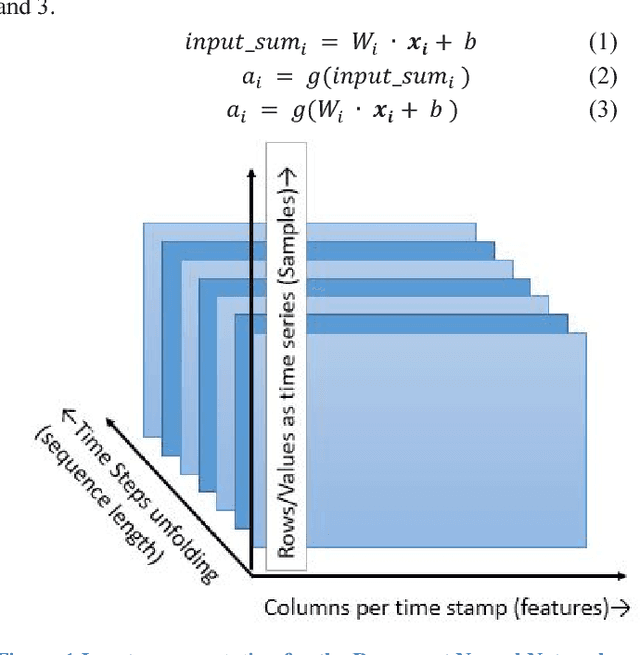
The non-stationarity characteristic of the solar power renders traditional point forecasting methods to be less useful due to large prediction errors. This results in increased uncertainties in the grid operation, thereby negatively affecting the reliability and increased cost of operation. This research paper proposes a unified architecture for multi-time-horizon predictions for short and long-term solar forecasting using Recurrent Neural Networks (RNN). The paper describes an end-to-end pipeline to implement the architecture along with the methods to test and validate the performance of the prediction model. The results demonstrate that the proposed method based on the unified architecture is effective for multi-horizon solar forecasting and achieves a lower root-mean-squared prediction error compared to the previous best-performing methods which use one model for each time-horizon. The proposed method enables multi-horizon forecasts with real-time inputs, which have a high potential for practical applications in the evolving smart grid.