 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDreamControl: Human-Inspired Whole-Body Humanoid Control for Scene Interaction via Guided Diffusion
Sep 17, 2025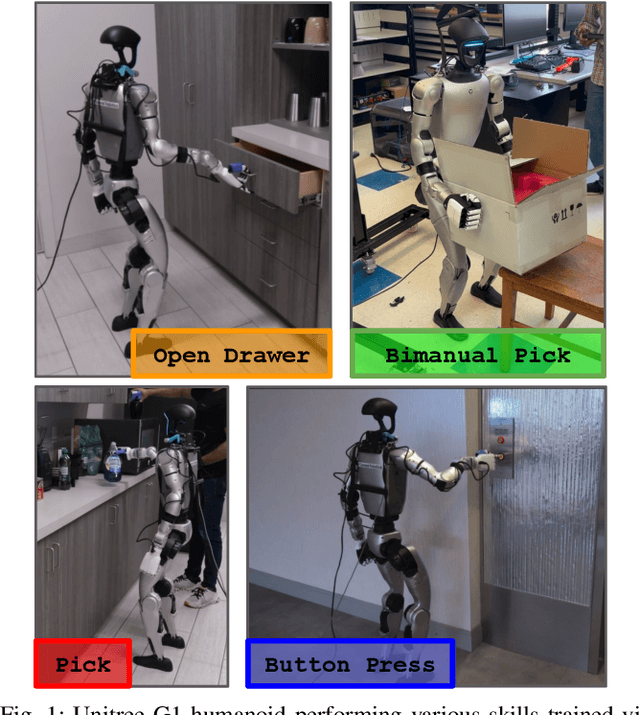
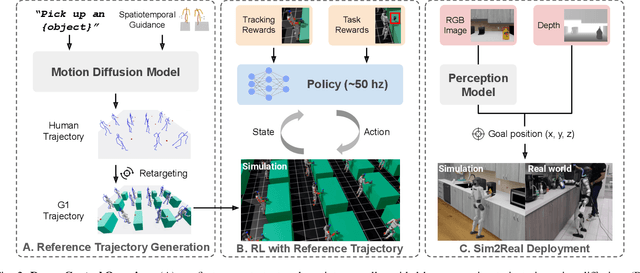
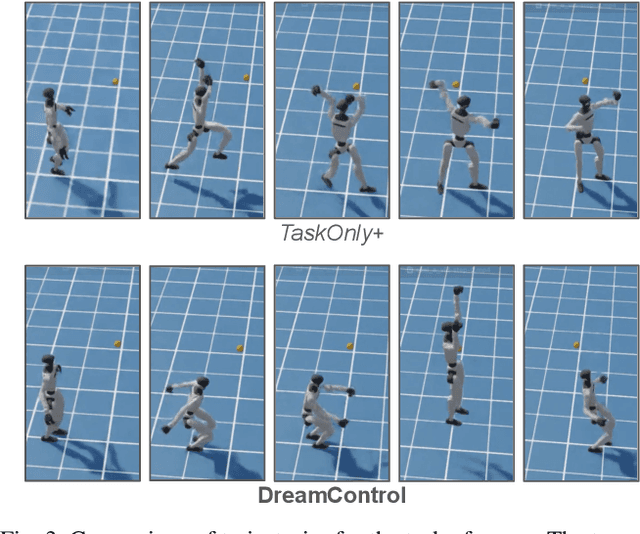
We introduce DreamControl, a novel methodology for learning autonomous whole-body humanoid skills. DreamControl leverages the strengths of diffusion models and Reinforcement Learning (RL): our core innovation is the use of a diffusion prior trained on human motion data, which subsequently guides an RL policy in simulation to complete specific tasks of interest (e.g., opening a drawer or picking up an object). We demonstrate that this human motion-informed prior allows RL to discover solutions unattainable by direct RL, and that diffusion models inherently promote natural looking motions, aiding in sim-to-real transfer. We validate DreamControl's effectiveness on a Unitree G1 robot across a diverse set of challenging tasks involving simultaneous lower and upper body control and object interaction.
MatMamba: A Matryoshka State Space Model
Oct 09, 2024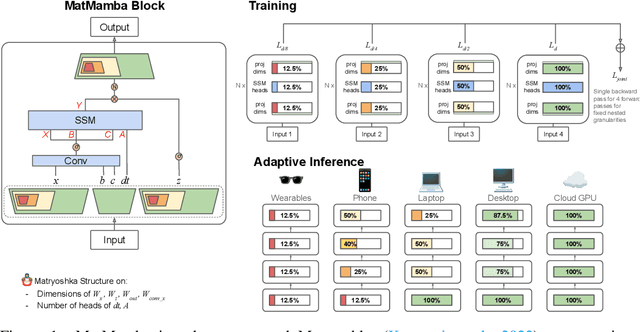



State Space Models (SSMs) like Mamba2 are a promising alternative to Transformers, with faster theoretical training and inference times -- especially for long context lengths. Recent work on Matryoshka Representation Learning -- and its application to Transformer backbones in works like MatFormer -- showed how to introduce nested granularities of smaller submodels in one universal elastic model. In this work, we present MatMamba: a state space model which combines Matryoshka-style learning with Mamba2, by modifying the block to contain nested dimensions to enable joint training and adaptive inference. MatMamba allows for efficient and adaptive deployment across various model sizes. We train a single large MatMamba model and are able to get a number of smaller nested models for free -- while maintaining or improving upon the performance of a baseline smaller model trained from scratch. We train language and image models at a variety of parameter sizes from 35M to 1.4B. Our results on ImageNet and FineWeb show that MatMamba models scale comparably to Transformers, while having more efficient inference characteristics. This makes MatMamba a practically viable option for deploying large-scale models in an elastic way based on the available inference compute. Code and models are open sourced at \url{https://github.com/ScaledFoundations/MatMamba}
Logically Constrained Robotics Transformers for Enhanced Perception-Action Planning
Aug 09, 2024


With the advent of large foundation model based planning, there is a dire need to ensure their output aligns with the stakeholder's intent. When these models are deployed in the real world, the need for alignment is magnified due to the potential cost to life and infrastructure due to unexpected faliures. Temporal Logic specifications have long provided a way to constrain system behaviors and are a natural fit for these use cases. In this work, we propose a novel approach to factor in signal temporal logic specifications while using autoregressive transformer models for trajectory planning. We also provide a trajectory dataset for pretraining and evaluating foundation models. Our proposed technique acheives 74.3 % higher specification satisfaction over the baselines.
GRID: A Platform for General Robot Intelligence Development
Oct 07, 2023



Developing machine intelligence abilities in robots and autonomous systems is an expensive and time consuming process. Existing solutions are tailored to specific applications and are harder to generalize. Furthermore, scarcity of training data adds a layer of complexity in deploying deep machine learning models. We present a new platform for General Robot Intelligence Development (GRID) to address both of these issues. The platform enables robots to learn, compose and adapt skills to their physical capabilities, environmental constraints and goals. The platform addresses AI problems in robotics via foundation models that know the physical world. GRID is designed from the ground up to be extensible to accommodate new types of robots, vehicles, hardware platforms and software protocols. In addition, the modular design enables various deep ML components and existing foundation models to be easily usable in a wider variety of robot-centric problems. We demonstrate the platform in various aerial robotics scenarios and demonstrate how the platform dramatically accelerates development of machine intelligent robots.
EvDNeRF: Reconstructing Event Data with Dynamic Neural Radiance Fields
Oct 03, 2023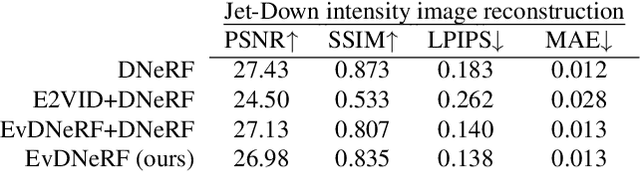
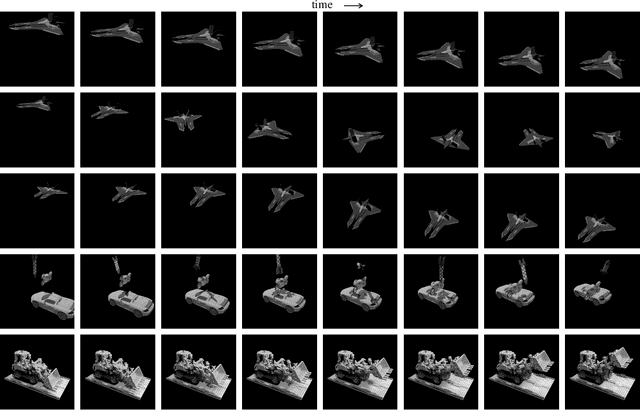
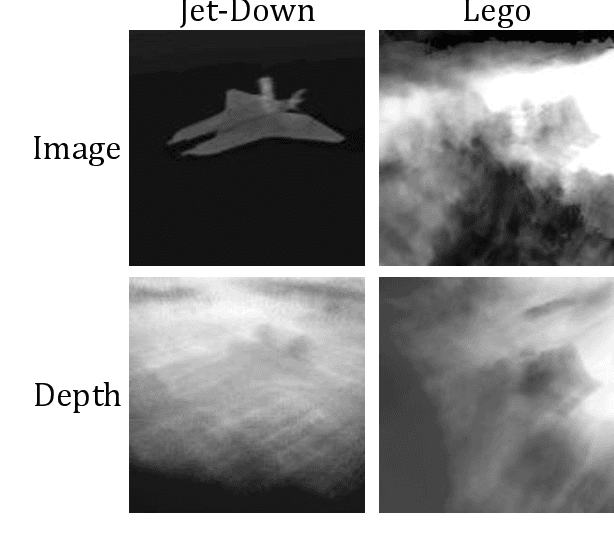
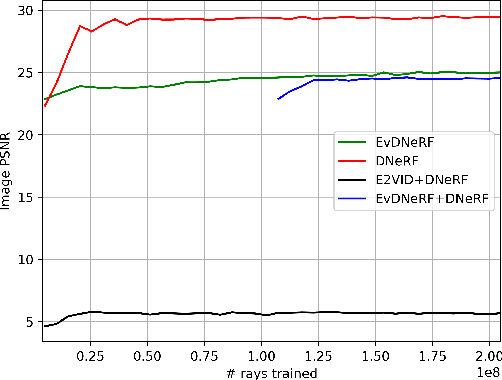
We present EvDNeRF, a pipeline for generating event data and training an event-based dynamic NeRF, for the purpose of faithfully reconstructing eventstreams on scenes with rigid and non-rigid deformations that may be too fast to capture with a standard camera. Event cameras register asynchronous per-pixel brightness changes at MHz rates with high dynamic range, making them ideal for observing fast motion with almost no motion blur. Neural radiance fields (NeRFs) offer visual-quality geometric-based learnable rendering, but prior work with events has only considered reconstruction of static scenes. Our EvDNeRF can predict eventstreams of dynamic scenes from a static or moving viewpoint between any desired timestamps, thereby allowing it to be used as an event-based simulator for a given scene. We show that by training on varied batch sizes of events, we can improve test-time predictions of events at fine time resolutions, outperforming baselines that pair standard dynamic NeRFs with event simulators. We release our simulated and real datasets, as well as code for both event-based data generation and the training of event-based dynamic NeRF models (https://github.com/anish-bhattacharya/EvDNeRF).
Is Imitation All You Need? Generalized Decision-Making with Dual-Phase Training
Jul 18, 2023



We introduce DualMind, a generalist agent designed to tackle various decision-making tasks that addresses challenges posed by current methods, such as overfitting behaviors and dependence on task-specific fine-tuning. DualMind uses a novel "Dual-phase" training strategy that emulates how humans learn to act in the world. The model first learns fundamental common knowledge through a self-supervised objective tailored for control tasks and then learns how to make decisions based on different contexts through imitating behaviors conditioned on given prompts. DualMind can handle tasks across domains, scenes, and embodiments using just a single set of model weights and can execute zero-shot prompting without requiring task-specific fine-tuning. We evaluate DualMind on MetaWorld and Habitat through extensive experiments and demonstrate its superior generalizability compared to previous techniques, outperforming other generalist agents by over 50$\%$ and 70$\%$ on Habitat and MetaWorld, respectively. On the 45 tasks in MetaWorld, DualMind achieves over 30 tasks at a 90$\%$ success rate.
ConBaT: Control Barrier Transformer for Safe Policy Learning
Mar 07, 2023Large-scale self-supervised models have recently revolutionized our ability to perform a variety of tasks within the vision and language domains. However, using such models for autonomous systems is challenging because of safety requirements: besides executing correct actions, an autonomous agent must also avoid the high cost and potentially fatal critical mistakes. Traditionally, self-supervised training mainly focuses on imitating previously observed behaviors, and the training demonstrations carry no notion of which behaviors should be explicitly avoided. In this work, we propose Control Barrier Transformer (ConBaT), an approach that learns safe behaviors from demonstrations in a self-supervised fashion. ConBaT is inspired by the concept of control barrier functions in control theory and uses a causal transformer that learns to predict safe robot actions autoregressively using a critic that requires minimal safety data labeling. During deployment, we employ a lightweight online optimization to find actions that ensure future states lie within the learned safe set. We apply our approach to different simulated control tasks and show that our method results in safer control policies compared to other classical and learning-based methods such as imitation learning, reinforcement learning, and model predictive control.
Masked Autoencoders for Egocentric Video Understanding @ Ego4D Challenge 2022
Nov 18, 2022


In this report, we present our approach and empirical results of applying masked autoencoders in two egocentric video understanding tasks, namely, Object State Change Classification and PNR Temporal Localization, of Ego4D Challenge 2022. As team TheSSVL, we ranked 2nd place in both tasks. Our code will be made available.
Learning Modular Simulations for Homogeneous Systems
Oct 28, 2022



Complex systems are often decomposed into modular subsystems for engineering tractability. Although various equation based white-box modeling techniques make use of such structure, learning based methods have yet to incorporate these ideas broadly. We present a modular simulation framework for modeling homogeneous multibody dynamical systems, which combines ideas from graph neural networks and neural differential equations. We learn to model the individual dynamical subsystem as a neural ODE module. Full simulation of the composite system is orchestrated via spatio-temporal message passing between these modules. An arbitrary number of modules can be combined to simulate systems of a wide variety of coupling topologies. We evaluate our framework on a variety of systems and show that message passing allows coordination between multiple modules over time for accurate predictions and in certain cases, enables zero-shot generalization to new system configurations. Furthermore, we show that our models can be transferred to new system configurations with lower data requirement and training effort, compared to those trained from scratch.
PACT: Perception-Action Causal Transformer for Autoregressive Robotics Pre-Training
Sep 23, 2022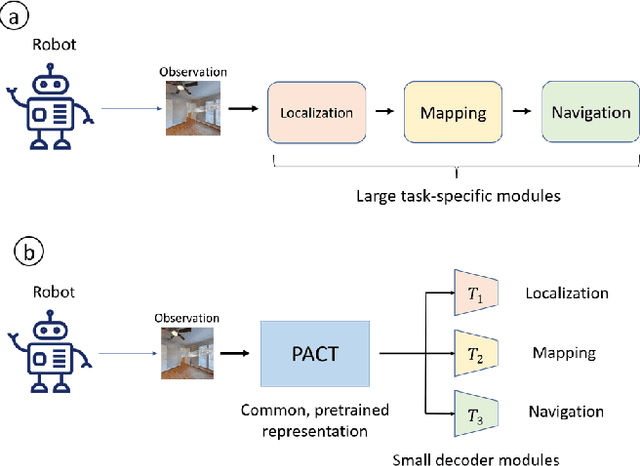
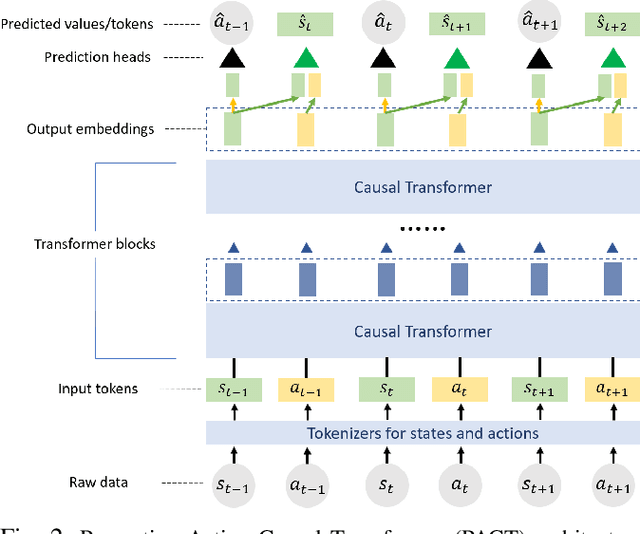
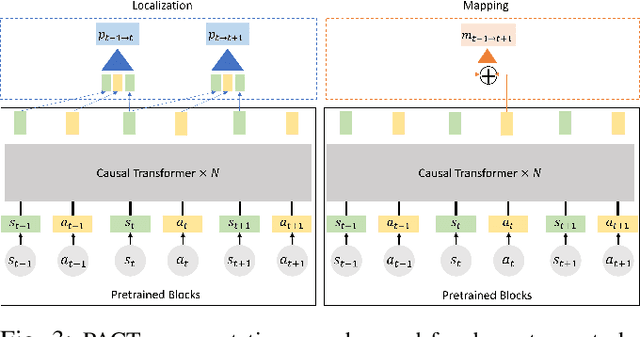
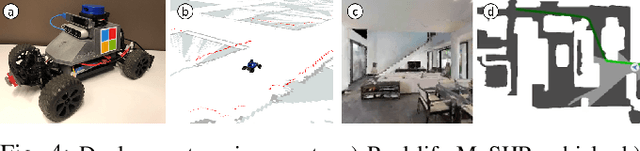
Robotics has long been a field riddled with complex systems architectures whose modules and connections, whether traditional or learning-based, require significant human expertise and prior knowledge. Inspired by large pre-trained language models, this work introduces a paradigm for pre-training a general purpose representation that can serve as a starting point for multiple tasks on a given robot. We present the Perception-Action Causal Transformer (PACT), a generative transformer-based architecture that aims to build representations directly from robot data in a self-supervised fashion. Through autoregressive prediction of states and actions over time, our model implicitly encodes dynamics and behaviors for a particular robot. Our experimental evaluation focuses on the domain of mobile agents, where we show that this robot-specific representation can function as a single starting point to achieve distinct tasks such as safe navigation, localization and mapping. We evaluate two form factors: a wheeled robot that uses a LiDAR sensor as perception input (MuSHR), and a simulated agent that uses first-person RGB images (Habitat). We show that finetuning small task-specific networks on top of the larger pretrained model results in significantly better performance compared to training a single model from scratch for all tasks simultaneously, and comparable performance to training a separate large model for each task independently. By sharing a common good-quality representation across tasks we can lower overall model capacity and speed up the real-time deployment of such systems.