 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCovariance Descriptors Meet General Vision Encoders: Riemannian Deep Learning for Medical Image Classification
Nov 06, 2025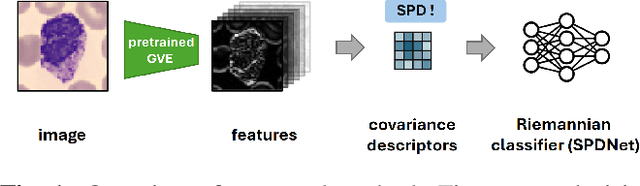
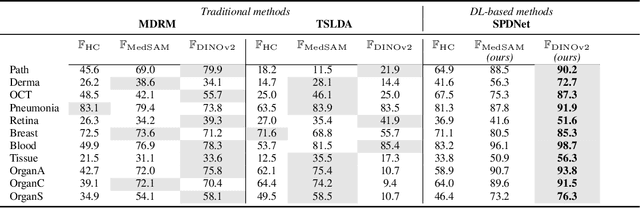
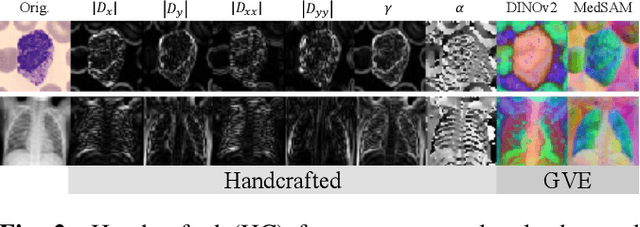
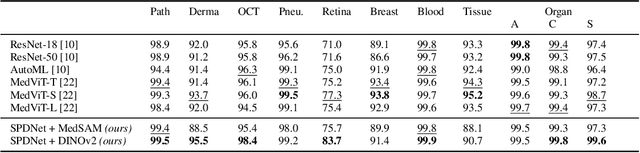
Covariance descriptors capture second-order statistics of image features. They have shown strong performance in general computer vision tasks, but remain underexplored in medical imaging. We investigate their effectiveness for both conventional and learning-based medical image classification, with a particular focus on SPDNet, a classification network specifically designed for symmetric positive definite (SPD) matrices. We propose constructing covariance descriptors from features extracted by pre-trained general vision encoders (GVEs) and comparing them with handcrafted descriptors. Two GVEs - DINOv2 and MedSAM - are evaluated across eleven binary and multi-class datasets from the MedMNSIT benchmark. Our results show that covariance descriptors derived from GVE features consistently outperform those derived from handcrafted features. Moreover, SPDNet yields superior performance to state-of-the-art methods when combined with DINOv2 features. Our findings highlight the potential of combining covariance descriptors with powerful pretrained vision encoders for medical image analysis.
From Model Based to Learned Regularization in Medical Image Registration: A Comprehensive Review
Dec 20, 2024Image registration is fundamental in medical imaging applications, such as disease progression analysis or radiation therapy planning. The primary objective of image registration is to precisely capture the deformation between two or more images, typically achieved by minimizing an optimization problem. Due to its inherent ill-posedness, regularization is a key component in driving the solution toward anatomically meaningful deformations. A wide range of regularization methods has been proposed for both conventional and deep learning-based registration. However, the appropriate application of regularization techniques often depends on the specific registration problem, and no one-fits-all method exists. Despite its importance, regularization is often overlooked or addressed with default approaches, assuming existing methods are sufficient. A comprehensive and structured review remains missing. This review addresses this gap by introducing a novel taxonomy that systematically categorizes the diverse range of proposed regularization methods. It highlights the emerging field of learned regularization, which leverages data-driven techniques to automatically derive deformation properties from the data. Moreover, this review examines the transfer of regularization methods from conventional to learning-based registration, identifies open challenges, and outlines future research directions. By emphasizing the critical role of regularization in image registration, we hope to inspire the research community to reconsider regularization strategies in modern registration algorithms and to explore this rapidly evolving field further.
A Self-Supervised Image Registration Approach for Measuring Local Response Patterns in Metastatic Ovarian Cancer
Jul 24, 2024



High-grade serous ovarian carcinoma (HGSOC) is characterised by significant spatial and temporal heterogeneity, typically manifesting at an advanced metastatic stage. A major challenge in treating advanced HGSOC is effectively monitoring localised change in tumour burden across multiple sites during neoadjuvant chemotherapy (NACT) and predicting long-term pathological response and overall patient survival. In this work, we propose a self-supervised deformable image registration algorithm that utilises a general-purpose image encoder for image feature extraction to co-register contrast-enhanced computerised tomography scan images acquired before and after neoadjuvant chemotherapy. This approach addresses challenges posed by highly complex tumour deformations and longitudinal lesion matching during treatment. Localised tumour changes are calculated using the Jacobian determinant maps of the registration deformation at multiple disease sites and their macroscopic areas, including hypo-dense (i.e., cystic/necrotic), hyper-dense (i.e., calcified), and intermediate density (i.e., soft tissue) portions. A series of experiments is conducted to understand the role of a general-purpose image encoder and its application in quantifying change in tumour burden during neoadjuvant chemotherapy in HGSOC. This work is the first to demonstrate the feasibility of a self-supervised image registration approach in quantifying NACT-induced localised tumour changes across the whole disease burden of patients with complex multi-site HGSOC, which could be used as a potential marker for ovarian cancer patient's long-term pathological response and survival.
General Vision Encoder Features as Guidance in Medical Image Registration
Jul 18, 2024General vision encoders like DINOv2 and SAM have recently transformed computer vision. Even though they are trained on natural images, such encoder models have excelled in medical imaging, e.g., in classification, segmentation, and registration. However, no in-depth comparison of different state-of-the-art general vision encoders for medical registration is available. In this work, we investigate how well general vision encoder features can be used in the dissimilarity metrics for medical image registration. We explore two encoders that were trained on natural images as well as one that was fine-tuned on medical data. We apply the features within the well-established B-spline FFD registration framework. In extensive experiments on cardiac cine MRI data, we find that using features as additional guidance for conventional metrics improves the registration quality. The code is available at github.com/compai-lab/2024-miccai-koegl.
Data-Driven Tissue- and Subject-Specific Elastic Regularization for Medical Image Registration
Jul 05, 2024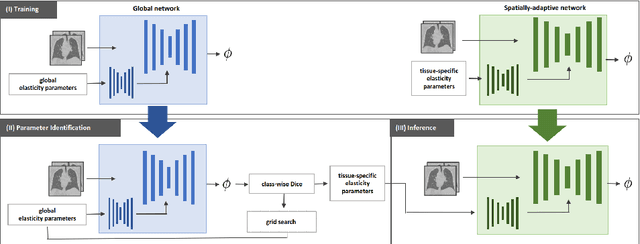
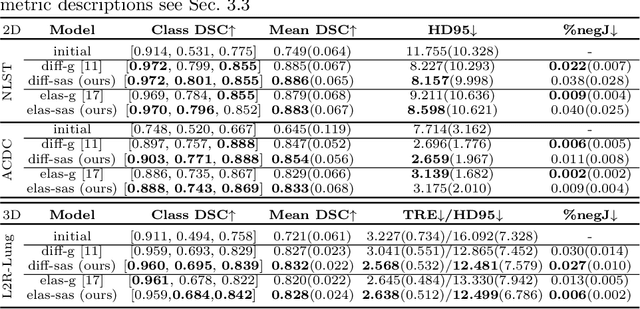
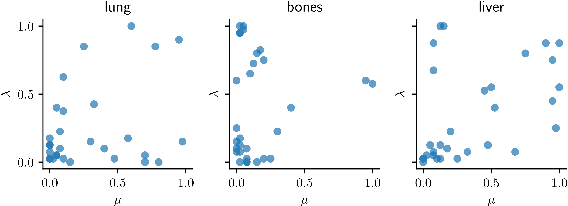
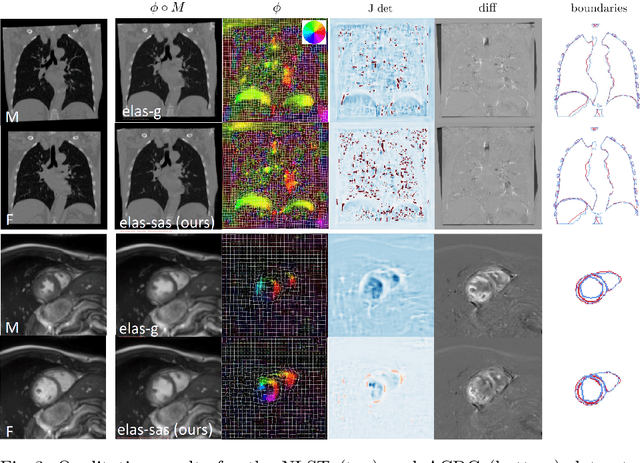
Physics-inspired regularization is desired for intra-patient image registration since it can effectively capture the biomechanical characteristics of anatomical structures. However, a major challenge lies in the reliance on physical parameters: Parameter estimations vary widely across the literature, and the physical properties themselves are inherently subject-specific. In this work, we introduce a novel data-driven method that leverages hypernetworks to learn the tissue-dependent elasticity parameters of an elastic regularizer. Notably, our approach facilitates the estimation of patient-specific parameters without the need to retrain the network. We evaluate our method on three publicly available 2D and 3D lung CT and cardiac MR datasets. We find that with our proposed subject-specific tissue-dependent regularization, a higher registration quality is achieved across all datasets compared to using a global regularizer. The code is available at https://github.com/compai-lab/2024-miccai-reithmeir.
Learning Physics-Inspired Regularization for Medical Image Registration with Hypernetworks
Nov 14, 2023Medical image registration aims at identifying the spatial deformation between images of the same anatomical region and is fundamental to image-based diagnostics and therapy. To date, the majority of the deep learning-based registration methods employ regularizers that enforce global spatial smoothness, e.g., the diffusion regularizer. However, such regularizers are not tailored to the data and might not be capable of reflecting the complex underlying deformation. In contrast, physics-inspired regularizers promote physically plausible deformations. One such regularizer is the linear elastic regularizer which models the deformation of elastic material. These regularizers are driven by parameters that define the material's physical properties. For biological tissue, a wide range of estimations of such parameters can be found in the literature and it remains an open challenge to identify suitable parameter values for successful registration. To overcome this problem and to incorporate physical properties into learning-based registration, we propose to use a hypernetwork that learns the effect of the physical parameters of a physics-inspired regularizer on the resulting spatial deformation field. In particular, we adapt the HyperMorph framework to learn the effect of the two elasticity parameters of the linear elastic regularizer. Our approach enables the efficient discovery of suitable, data-specific physical parameters at test time.
Human-to-Robot Manipulability Domain Adaptation with Parallel Transport and Manifold-Aware ICP
Aug 16, 2022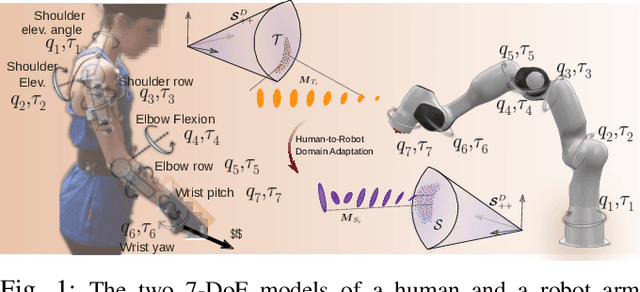
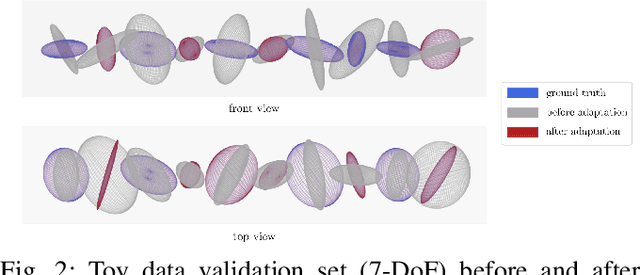


Manipulability ellipsoids efficiently capture the human pose and reveal information about the task at hand. Their use in task-dependent robot teaching - particularly their transfer from a teacher to a learner - can advance emulation of human-like motion. Although in recent literature focus is shifted towards manipulability transfer between two robots, the adaptation to the capabilities of the other kinematic system is to date not addressed and research in transfer from human to robot is still in its infancy. This work presents a novel manipulability domain adaptation method for the transfer of manipulability information to the domain of another kinematic system. As manipulability matrices/ellipsoids are symmetric positive-definite (SPD) they can be viewed as points on the Riemannian manifold of SPD matrices. We are the first to address the problem of manipulability transfer from the perspective of point cloud registration. We propose a manifold-aware Iterative Closest Point algorithm (ICP) with parallel transport initialization. Furthermore, we introduce a correspondence matching heuristic for manipulability ellipsoids based on inherent geometric features. We confirm our method in simulation experiments with 2-DoF manipulators as well as 7-DoF models representing the human-arm kinematics.