 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive and Safety-Aware Path Replanning for Collaborative Applications
Mar 10, 2025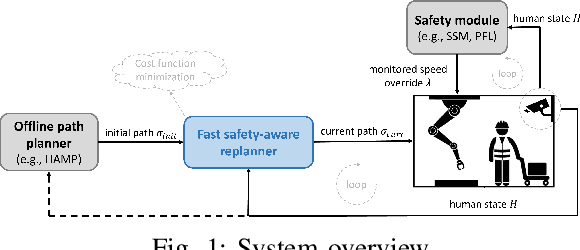
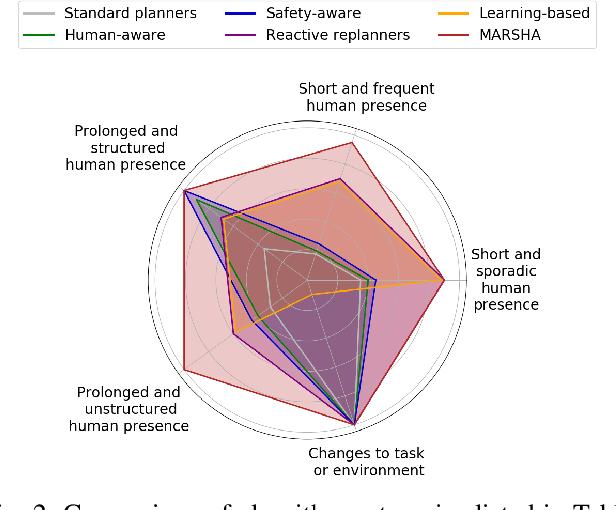
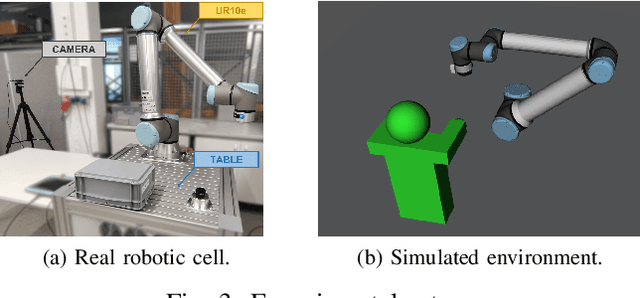

This paper addresses motion replanning in human-robot collaborative scenarios, emphasizing reactivity and safety-compliant efficiency. While existing human-aware motion planners are effective in structured environments, they often struggle with unpredictable human behavior, leading to safety measures that limit robot performance and throughput. In this study, we combine reactive path replanning and a safety-aware cost function, allowing the robot to adjust its path to changes in the human state. This solution reduces the execution time and the need for trajectory slowdowns without sacrificing safety. Simulations and real-world experiments show the method's effectiveness compared to standard human-robot cooperation approaches, with efficiency enhancements of up to 60\%.
Towards Safe Robot Use with Edged or Pointed Objects: A Surrogate Study Assembling a Human Hand Injury Protection Database
Apr 05, 2024



The use of pointed or edged tools or objects is one of the most challenging aspects of today's application of physical human-robot interaction (pHRI). One reason for this is that the severity of harm caused by such edged or pointed impactors is less well studied than for blunt impactors. Consequently, the standards specify well-reasoned force and pressure thresholds for blunt impactors and advise avoiding any edges and corners in contacts. Nevertheless, pointed or edged impactor geometries cannot be completely ruled out in real pHRI applications. For example, to allow edged or pointed tools such as screwdrivers near human operators, the knowledge of injury severity needs to be extended so that robot integrators can perform well-reasoned, time-efficient risk assessments. In this paper, we provide the initial datasets on injury prevention for the human hand based on drop tests with surrogates for the human hand, namely pig claws and chicken drumsticks. We then demonstrate the ease and efficiency of robot use using the dataset for contact on two examples. Finally, our experiments provide a set of injuries that may also be expected for human subjects under certain robot mass-velocity constellations in collisions. To extend this work, testing on human samples and a collaborative effort from research institutes worldwide is needed to create a comprehensive human injury avoidance database for any pHRI scenario and thus for safe pHRI applications including edged and pointed geometries.
A Concise Overview of Safety Aspects in Human-Robot Interaction
Sep 18, 2023



As of today, robots exhibit impressive agility but also pose potential hazards to humans using/collaborating with them. Consequently, safety is considered the most paramount factor in human-robot interaction (HRI). This paper presents a multi-layered safety architecture, integrating both physical and cognitive aspects for effective HRI. We outline critical requirements for physical safety layers as service modules that can be arbitrarily queried. Further, we showcase an HRI scheme that addresses human factors and perceived safety as high-level constraints on a validated impact safety paradigm. The aim is to enable safety certification of human-friendly robots across various HRI scenarios.
Fast yet predictable braking manoeuvers for real-time robot control
Jun 10, 2023This paper proposes a framework for generating fast, smooth and predictable braking manoeuvers for a controlled robot. The proposed framework integrates two approaches to obtain feasible modal limits for designing braking trajectories. The first approach is real-time capable but conservative considering the usage of the available feasible actuator control region, resulting in longer braking times. In contrast, the second approach maximizes the used braking control inputs at the cost of requiring more time to evaluate larger, feasible modal limits via optimization. Both approaches allow for predicting the robot's stopping trajectory online. In addition, we also formulated and solved a constrained, nonlinear final-time minimization problem to find optimal torque inputs. The optimal solutions were used as a benchmark to evaluate the performance of the proposed predictable braking framework. A comparative study was compiled in simulation versus a classical optimal controller on a 7-DoF robot arm with only three moving joints. The results verified the effectiveness of our proposed framework and its integrated approaches in achieving fast robot braking manoeuvers with accurate online predictions of the stopping trajectories and distances under various braking settings.