 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-Based Injury Protection Database: Including Shearing Contact Thresholds for Hand and Finger Using Porcine Surrogates
Feb 23, 2026While robotics research continues to propose strategies for collision avoidance in human-robot interaction, the reality of constrained environments and future humanoid systems makes contact inevitable. To mitigate injury risks, energy-constraining control approaches are commonly used, often relying on safety thresholds derived from blunt impact data in EN ISO 10218-2:2025. However, this dataset does not extend to edged or pointed collisions. Without scalable, clinically grounded datasets covering diverse contact scenarios, safety validation remains limited. Previous studies have laid the groundwork by assessing surrogate-based velocity and mass limits across various geometries, focusing on perpendicular impacts. This study expands those datasets by including shearing contact scenarios in unconstrained collisions, revealing that collision angle significantly affects injury outcomes. Notably, unconstrained shearing contacts result in fewer injuries than perpendicular ones. By reevaluating all prior porcine surrogate data, we establish energy thresholds across geometries and contact types, forming the first energy-based Injury Protection Database. This enables the development of meaningful energy-limiting controllers that ensure safety across a wide range of realistic collision events.
Towards Unconstrained Collision Injury Protection Data Sets: Initial Surrogate Experiments for the Human Hand
Aug 12, 2024Safety for physical human-robot interaction (pHRI) is a major concern for all application domains. While current standardization for industrial robot applications provide safety constraints that address the onset of pain in blunt impacts, these impact thresholds are difficult to use on edged or pointed impactors. The most severe injuries occur in constrained contact scenarios, where crushing is possible. Nevertheless, situations potentially resulting in constrained contact only occur in certain areas of a workspace and design or organisational approaches can be used to avoid them. What remains are risks to the human physical integrity caused by unconstrained accidental contacts, which are difficult to avoid while maintaining robot motion efficiency. Nevertheless, the probability and severity of injuries occurring with edged or pointed impacting objects in unconstrained collisions is hardly researched. In this paper, we propose an experimental setup and procedure using two pendulums modeling human hands and arms and robots to understand the injury potential of unconstrained collisions of human hands with edged objects. Based on our previous studies, we use pig feet as ex vivo surrogate samples - as these closely resemble the physiological characteristics of human hands - to create an initial injury database on the severity of injuries caused by unconstrained edged or pointed impacts. The use of such experimental setups and procedures in addition to other research on the occurrence of injuries in humans will eventually lead to a complete understanding of the biomechanical injury potential in pHRI.
Towards Safe Robot Use with Edged or Pointed Objects: A Surrogate Study Assembling a Human Hand Injury Protection Database
Apr 05, 2024



The use of pointed or edged tools or objects is one of the most challenging aspects of today's application of physical human-robot interaction (pHRI). One reason for this is that the severity of harm caused by such edged or pointed impactors is less well studied than for blunt impactors. Consequently, the standards specify well-reasoned force and pressure thresholds for blunt impactors and advise avoiding any edges and corners in contacts. Nevertheless, pointed or edged impactor geometries cannot be completely ruled out in real pHRI applications. For example, to allow edged or pointed tools such as screwdrivers near human operators, the knowledge of injury severity needs to be extended so that robot integrators can perform well-reasoned, time-efficient risk assessments. In this paper, we provide the initial datasets on injury prevention for the human hand based on drop tests with surrogates for the human hand, namely pig claws and chicken drumsticks. We then demonstrate the ease and efficiency of robot use using the dataset for contact on two examples. Finally, our experiments provide a set of injuries that may also be expected for human subjects under certain robot mass-velocity constellations in collisions. To extend this work, testing on human samples and a collaborative effort from research institutes worldwide is needed to create a comprehensive human injury avoidance database for any pHRI scenario and thus for safe pHRI applications including edged and pointed geometries.
ISO/TS 15066: How Different Interpretations Affect Risk Assessment
Mar 05, 2022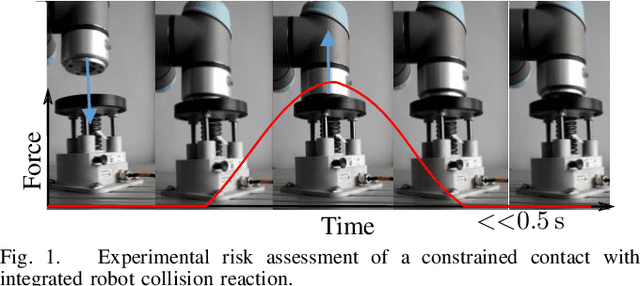
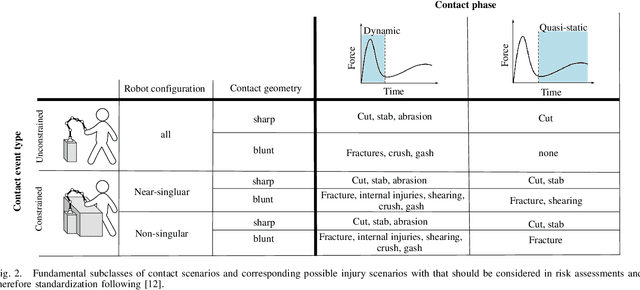
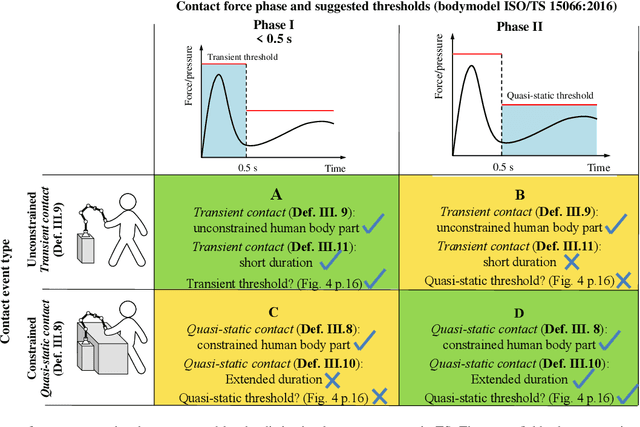
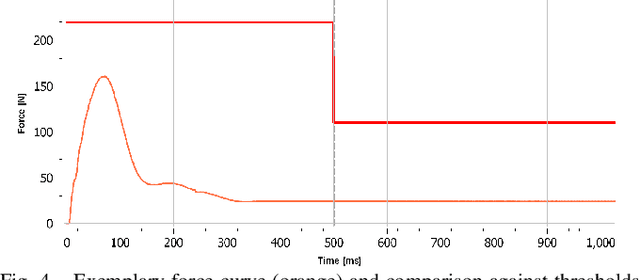
The current technical specification ISO/TS15066:2016(E) for safe human-robot interaction contains logically conflicting definitions for the contact between human and robot. This may result in different interpretations for the contact classification and thus no unique outcome can be expected, which may even cause a risk to the human. In previous work, we showed a first set of implications. This paper addresses the possible interpretations of a collision scenario as a result of the varying interpretations for a risk assessment. With an experiment including four commercially available robot systems we demonstrate the procedure of the risk assessment following the different interpretations of the TS. The results indicate possible incorrect use of the technical specification, which we believe needs to be resolved in future revisions. For this, we suggest tools in form of a decision tree and constrained collision force maps, which enable a simple, unambiguous risk assessment for HRI.
Expectable Motion Unit: Avoiding Hazards From Human Involuntary Motions in Human-Robot Interaction
Sep 15, 2021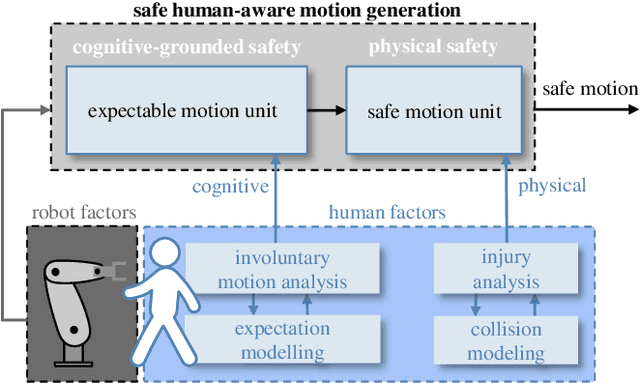

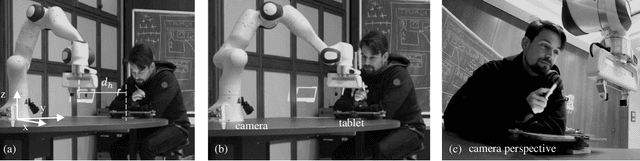
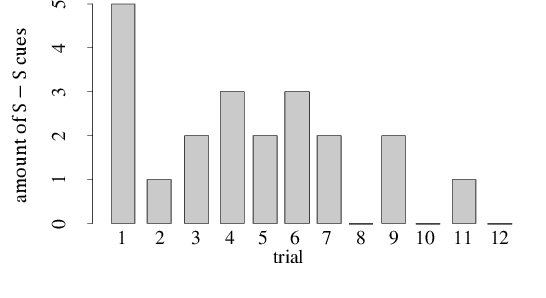
In robotics, many control and planning schemes have been developed that ensure the human physical safety in human-robot interaction. The human psychological state and expectation towards the robot, however, are typically neglected. Even if the robot behaviour is regarded as biomechanically safe, humans may still react with rapid involuntary motion (IM) caused by startle or surprise. Obviously, such sudden, uncontrolled motions can jeopardize safety and should be prevented by any means. In this paper, we propose the Expectable Motion Unit (EMU) concept which ensures that a certain probability of IM occurrence is not exceeded in a typical HRI setting. Based on a model of IM occurrence that we generate through an experiment with 29 participants, the mapping between robot velocity, robot-human distance, and the relative frequency of IM occurrence is established. This mapping is processed towards a real-time capable robot motion generator, which limits the robot velocity during task execution if necessary. The EMU is combined with the well-established Safe Motion Unit in order to integrate both physical and psychological safety knowledge and data into a holistic safety framework. In a validation experiment, it was shown that the EMU successfully avoids human IM in five out of six cases.