 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLaTTe: Language Trajectory TransformEr
Paper and Code
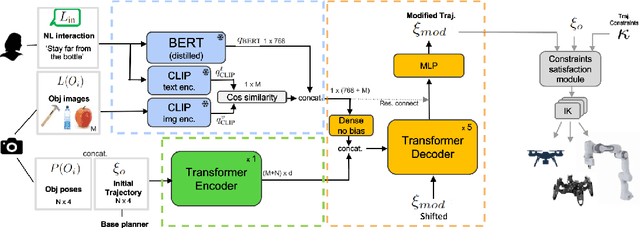
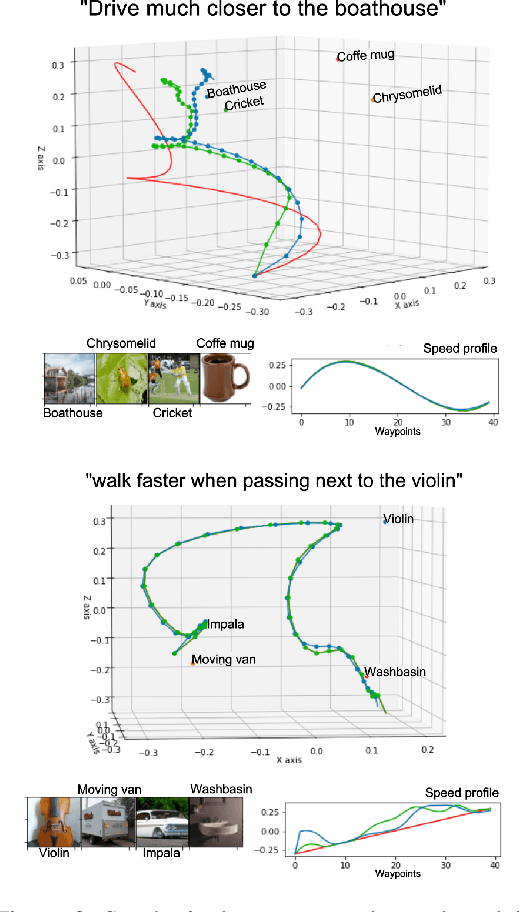

Natural language is one of the most intuitive ways to express human intent. However, translating instructions and commands towards robotic motion generation, and deployment in the real world, is far from being an easy task. Indeed, combining robotic's inherent low-level geometric and kinodynamic constraints with human's high-level semantic information reinvigorates and raises new challenges to the task-design problem -- typically leading to task or hardware specific solutions with a static set of action targets and commands. This work instead proposes a flexible language-based framework that allows to modify generic 3D robotic trajectories using language commands with reduced constraints about prior task or robot information. By taking advantage of pre-trained language models, we employ an auto-regressive transformer to map natural language inputs and contextual images into changes in 3D trajectories. We show through simulations and real-life experiments that the model can successfully follow human intent, modifying the shape and speed of trajectories for multiple robotic platforms and contexts. This study takes a step into building large pre-trained foundational models for robotics and shows how such models can create more intuitive and flexible interactions between human and machines. Codebase available at: https://github.com/arthurfenderbucker/NL_trajectory_reshaper.