 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Federated Learning for Continual Training
Apr 21, 2025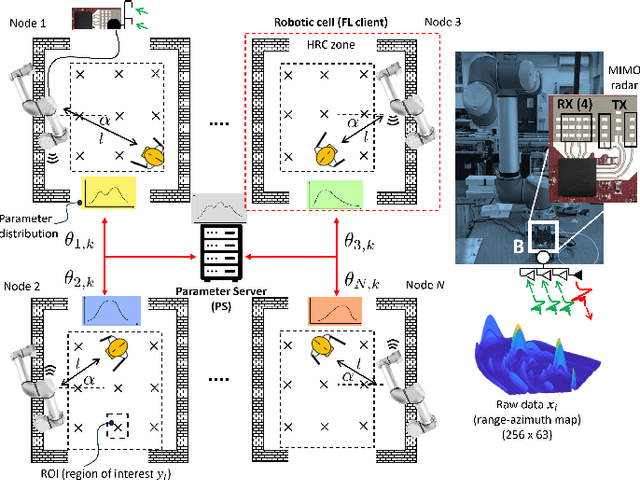
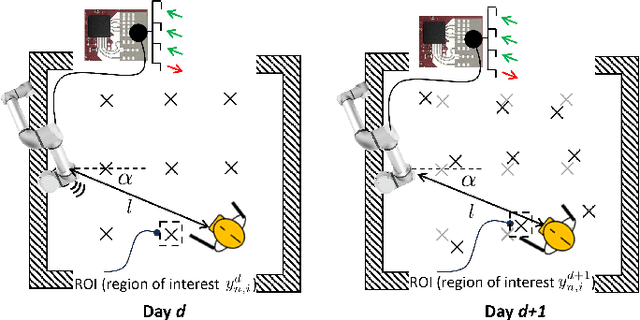
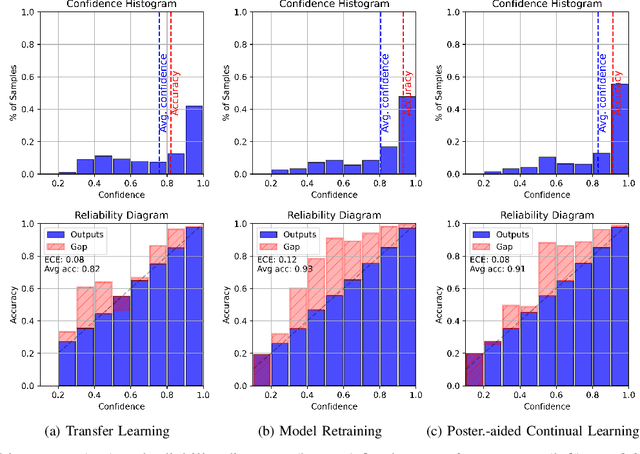
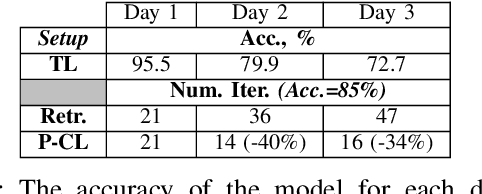
Bayesian Federated Learning (BFL) enables uncertainty quantification and robust adaptation in distributed learning. In contrast to the frequentist approach, it estimates the posterior distribution of a global model, offering insights into model reliability. However, current BFL methods neglect continual learning challenges in dynamic environments where data distributions shift over time. We propose a continual BFL framework applied to human sensing with radar data collected over several days. Using Stochastic Gradient Langevin Dynamics (SGLD), our approach sequentially updates the model, leveraging past posteriors to construct the prior for the new tasks. We assess the accuracy, the expected calibration error (ECE) and the convergence speed of our approach against several baselines. Results highlight the effectiveness of continual Bayesian updates in preserving knowledge and adapting to evolving data.
A Carbon Tracking Model for Federated Learning: Impact of Quantization and Sparsification
Oct 12, 2023



Federated Learning (FL) methods adopt efficient communication technologies to distribute machine learning tasks across edge devices, reducing the overhead in terms of data storage and computational complexity compared to centralized solutions. Rather than moving large data volumes from producers (sensors, machines) to energy-hungry data centers, raising environmental concerns due to resource demands, FL provides an alternative solution to mitigate the energy demands of several learning tasks while enabling new Artificial Intelligence of Things (AIoT) applications. This paper proposes a framework for real-time monitoring of the energy and carbon footprint impacts of FL systems. The carbon tracking tool is evaluated for consensus (fully decentralized) and classical FL policies. For the first time, we present a quantitative evaluation of different computationally and communication efficient FL methods from the perspectives of energy consumption and carbon equivalent emissions, suggesting also general guidelines for energy-efficient design. Results indicate that consensus-driven FL implementations should be preferred for limiting carbon emissions when the energy efficiency of the communication is low (i.e., < 25 Kbit/Joule). Besides, quantization and sparsification operations are shown to strike a balance between learning performances and energy consumption, leading to sustainable FL designs.
A physics-informed generative model for passive radio-frequency sensing
Oct 06, 2023



Electromagnetic (EM) body models predict the impact of human presence and motions on the Radio-Frequency (RF) stray radiation received by wireless devices nearby. These wireless devices may be co-located members of a Wireless Local Area Network (WLAN) or even cellular devices connected with a Wide Area Network (WAN). Despite their accuracy, EM models are time-consuming methods which prevent their adoption in strict real-time computational imaging problems and Bayesian estimation, such as passive localization, RF tomography, and holography. Physics-informed Generative Neural Network (GNN) models have recently attracted a lot of attention thanks to their potential to reproduce a process by incorporating relevant physical laws and constraints. Thus, GNNs can be used to simulate/reconstruct missing samples, or learn physics-informed data distributions. The paper discusses a Variational Auto-Encoder (VAE) technique and its adaptations to incorporate a relevant EM body diffraction method with applications to passive RF sensing and localization/tracking. The proposed EM-informed generative model is verified against classical diffraction-based EM body tools and validated on real RF measurements. Applications are also introduced and discussed.
On the Energy and Communication Efficiency Tradeoffs in Federated and Multi-Task Learning
Dec 02, 2022



Recent advances in Federated Learning (FL) have paved the way towards the design of novel strategies for solving multiple learning tasks simultaneously, by leveraging cooperation among networked devices. Multi-Task Learning (MTL) exploits relevant commonalities across tasks to improve efficiency compared with traditional transfer learning approaches. By learning multiple tasks jointly, significant reduction in terms of energy footprints can be obtained. This article provides a first look into the energy costs of MTL processes driven by the Model-Agnostic Meta-Learning (MAML) paradigm and implemented in distributed wireless networks. The paper targets a clustered multi-task network setup where autonomous agents learn different but related tasks. The MTL process is carried out in two stages: the optimization of a meta-model that can be quickly adapted to learn new tasks, and a task-specific model adaptation stage where the learned meta-model is transferred to agents and tailored for a specific task. This work analyzes the main factors that influence the MTL energy balance by considering a multi-task Reinforcement Learning (RL) setup in a robotized environment. Results show that the MAML method can reduce the energy bill by at least 2 times compared with traditional approaches without inductive transfer. Moreover, it is shown that the optimal energy balance in wireless networks depends on uplink/downlink and sidelink communication efficiencies.
An Energy and Carbon Footprint Analysis of Distributed and Federated Learning
Jun 21, 2022
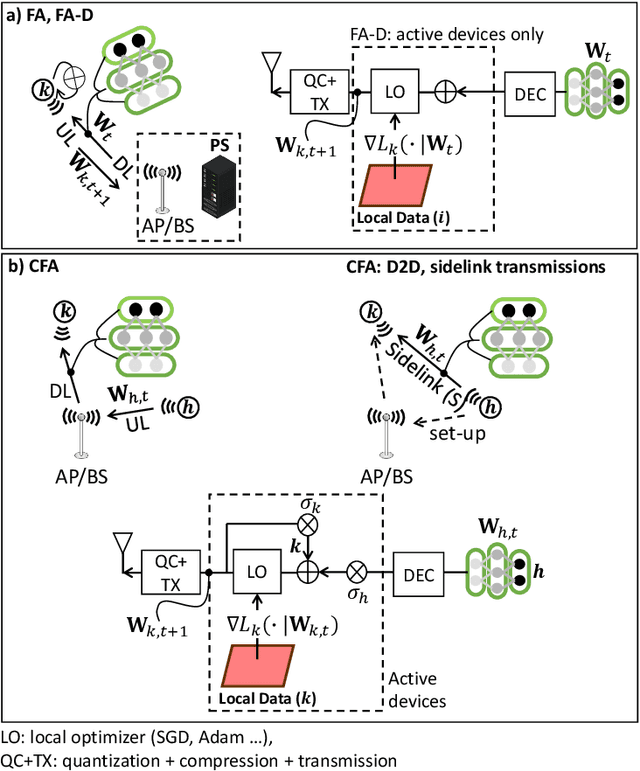
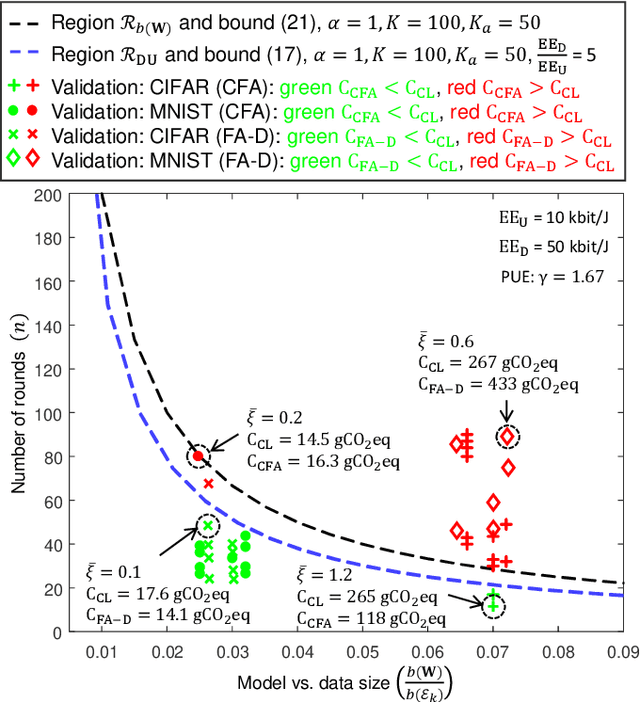
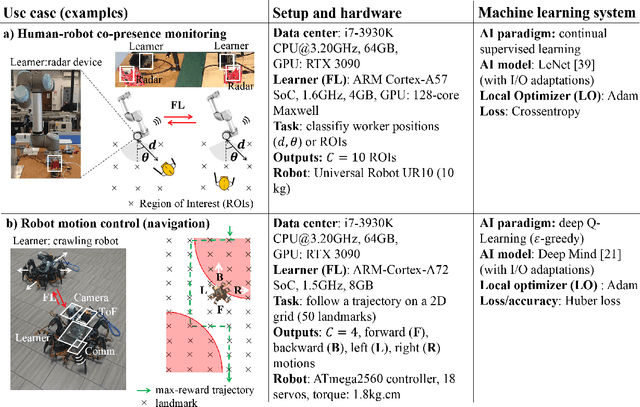
Classical and centralized Artificial Intelligence (AI) methods require moving data from producers (sensors, machines) to energy hungry data centers, raising environmental concerns due to computational and communication resource demands, while violating privacy. Emerging alternatives to mitigate such high energy costs propose to efficiently distribute, or federate, the learning tasks across devices, which are typically low-power. This paper proposes a novel framework for the analysis of energy and carbon footprints in distributed and federated learning (FL). The proposed framework quantifies both the energy footprints and the carbon equivalent emissions for vanilla FL methods and consensus-based fully decentralized approaches. We discuss optimal bounds and operational points that support green FL designs and underpin their sustainability assessment. Two case studies from emerging 5G industry verticals are analyzed: these quantify the environmental footprints of continual and reinforcement learning setups, where the training process is repeated periodically for continuous improvements. For all cases, sustainability of distributed learning relies on the fulfillment of specific requirements on communication efficiency and learner population size. Energy and test accuracy should be also traded off considering the model and the data footprints for the targeted industrial applications.
A cloud-IoT platform for passive radio sensing: challenges and application case studies
Mar 26, 2021


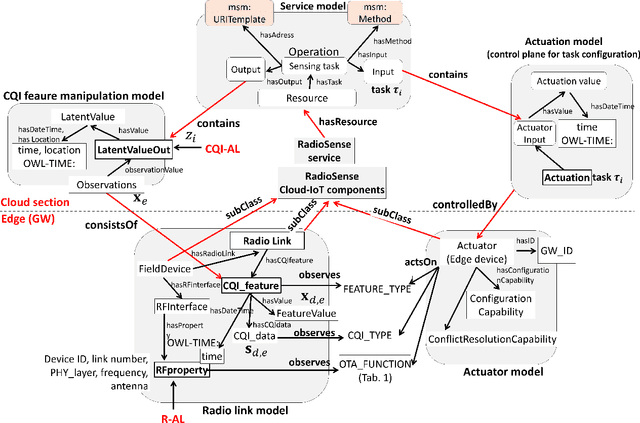
We propose a platform for the integration of passive radio sensing and vision technologies into a cloud-IoT framework that performs real-time channel quality information (CQI) time series processing and analytics. Radio sensing and vision technologies allow to passively detect and track objects or persons by using radio waves as probe signals that encode a 2D/3D view of the environment they propagate through. View reconstruction from the received radio signals, or CQI, is based on real-time data processing tools, that combine multiple radio measurements from possibly heterogeneous IoT networks. The proposed platform is designed to efficiently store and analyze CQI time series of different types and provides formal semantics for CQI data manipulation (ontology models). Post-processed data can be then accessible to third parties via JSON-REST calls. Finally, the proposed system supports the reconfiguration of CQI data collection based on the respective application. The performance of the proposed tools are evaluated through two experimental case studies that focus on assisted living applications in a smart-space environment and on driver behavior recognition for in-car control services. Both studies adopt and compare different CQI manipulation models and radio devices as supported by current and future (5G) standards.
A Multisensory Edge-Cloud Platform for Opportunistic Radio Sensing in Cobot Environments
Mar 26, 2021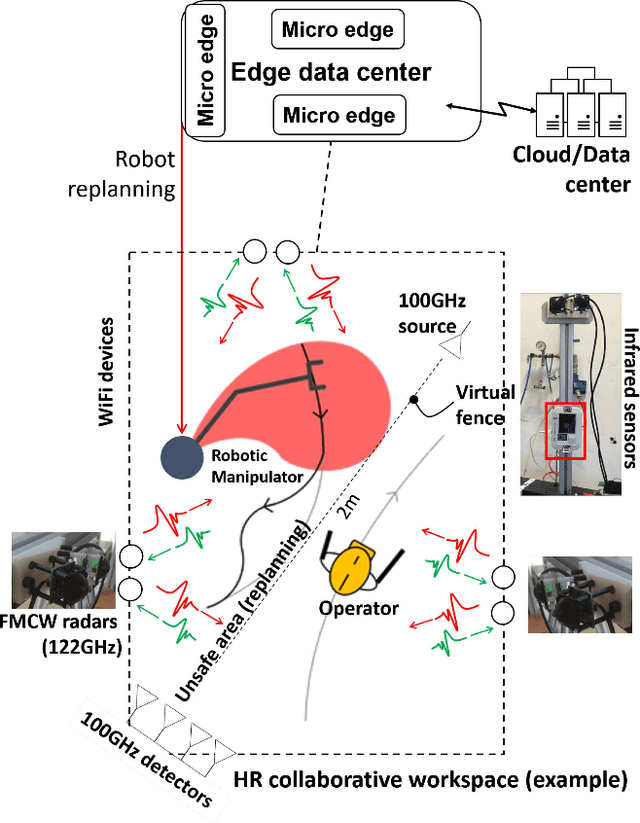

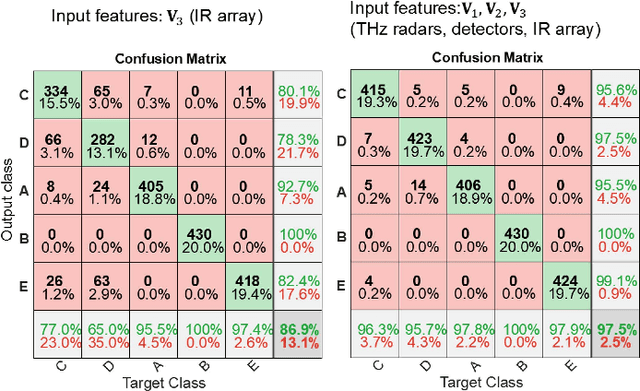
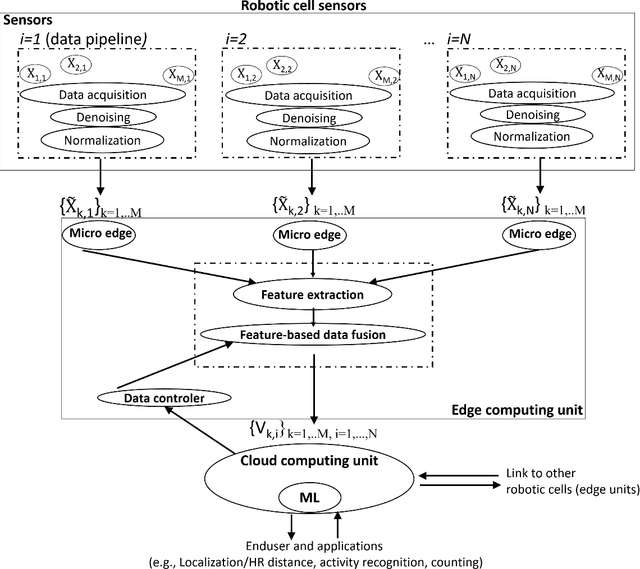
Worker monitoring and protection in collaborative robot (cobots) industrial environments requires advanced sensing capabilities and flexible solutions to monitor the movements of the operator in close proximity of moving robots. Collaborative robotics is an active research area where Internet of Things (IoT) and novel sensing technologies are expected to play a critical role. Considering that no single technology can currently solve the problem of continuous worker monitoring, the paper targets the development of an IoT multisensor data fusion (MDF) platform. It is based on an edge-cloud architecture that supports the combination and transformation of multiple sensing technologies to enable the passive and anonymous detection of workers. Multidimensional data acquisition from different IoT sources, signal pre-processing, feature extraction, data distribution and fusion, along with machine learning (ML) and computing methods are described. The proposed IoT platform also comprises a practical solution for data fusion and analytics. It is able to perform opportunistic and real-time perception of workers by fusing and analyzing radio signals obtained from several interconnected IoT components, namely a multi-antenna WiFi installation (2.4-5 GHz), a sub-THz imaging camera (100 GHz), a network of radars (122 GHz) and infrared sensors (8-13 {\mu}m). The performance of the proposed IoT platform is validated through real use case scenarios inside a pilot industrial plant in which protective human--robot distance must be guaranteed considering latency and detection uncertainties.
A Framework for Energy and Carbon Footprint Analysis of Distributed and Federated Edge Learning
Mar 18, 2021
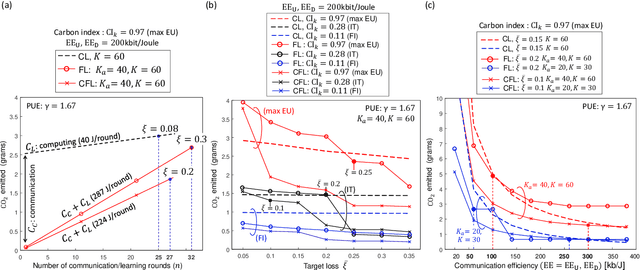


Recent advances in distributed learning raise environmental concerns due to the large energy needed to train and move data to/from data centers. Novel paradigms, such as federated learning (FL), are suitable for decentralized model training across devices or silos that simultaneously act as both data producers and learners. Unlike centralized learning (CL) techniques, relying on big-data fusion and analytics located in energy hungry data centers, in FL scenarios devices collaboratively train their models without sharing their private data. This article breaks down and analyzes the main factors that influence the environmental footprint of FL policies compared with classical CL/Big-Data algorithms running in data centers. The proposed analytical framework takes into account both learning and communication energy costs, as well as the carbon equivalent emissions; in addition, it models both vanilla and decentralized FL policies driven by consensus. The framework is evaluated in an industrial setting assuming a real-world robotized workplace. Results show that FL allows remarkable end-to-end energy savings (30%-40%) for wireless systems characterized by low bit/Joule efficiency (50 kbit/Joule or lower). Consensus-driven FL does not require the parameter server and further reduces emissions in mesh networks (200 kbit/Joule). On the other hand, all FL policies are slower to converge when local data are unevenly distributed (often 2x slower than CL). Energy footprint and learning loss can be traded off to optimize efficiency.
Opportunities of Federated Learning in Connected, Cooperative and Automated Industrial Systems
Jan 12, 2021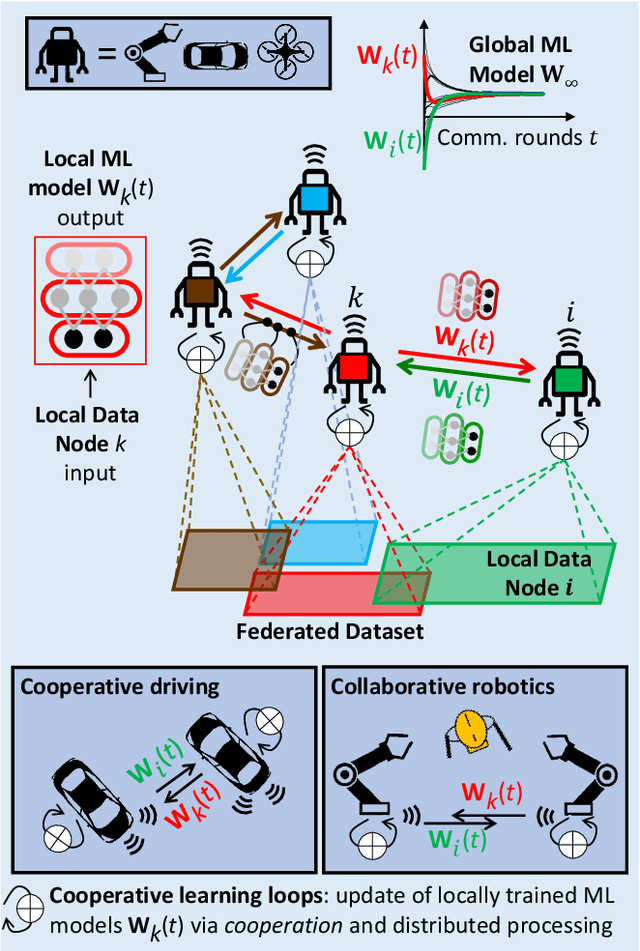
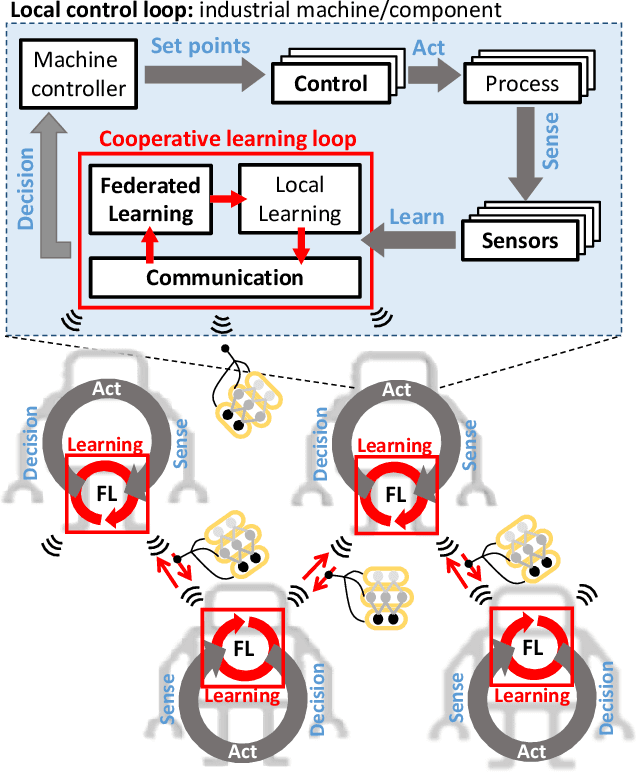

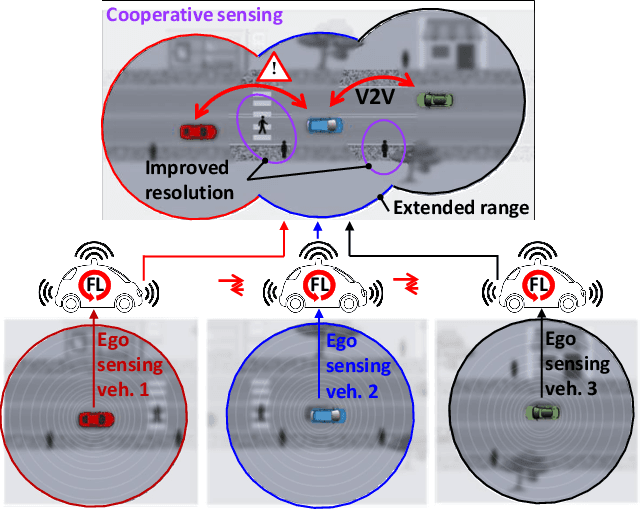
Next-generation autonomous and networked industrial systems (i.e., robots, vehicles, drones) have driven advances in ultra-reliable, low latency communications (URLLC) and computing. These networked multi-agent systems require fast, communication-efficient and distributed machine learning (ML) to provide mission critical control functionalities. Distributed ML techniques, including federated learning (FL), represent a mushrooming multidisciplinary research area weaving in sensing, communication and learning. FL enables continual model training in distributed wireless systems: rather than fusing raw data samples at a centralized server, FL leverages a cooperative fusion approach where networked agents, connected via URLLC, act as distributed learners that periodically exchange their locally trained model parameters. This article explores emerging opportunities of FL for the next-generation networked industrial systems. Open problems are discussed, focusing on cooperative driving in connected automated vehicles and collaborative robotics in smart manufacturing.