 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTarget Classification for Integrated Sensing and Communication in Industrial Deployments
Dec 23, 2025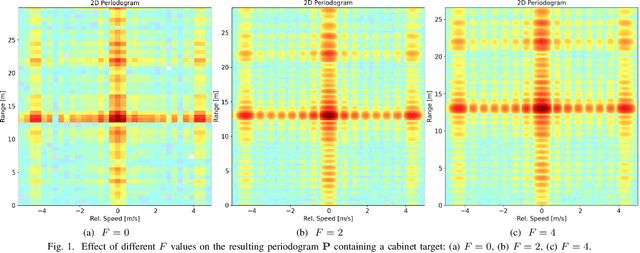
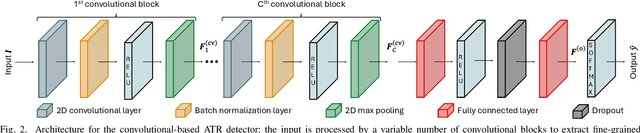
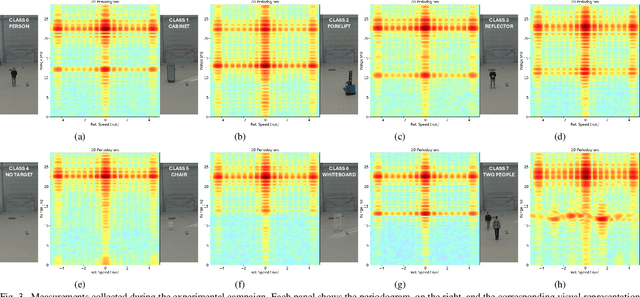
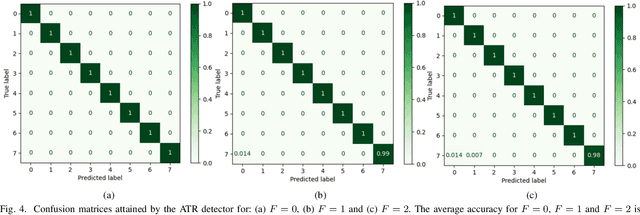
Integrated Sensing and Communication (ISAC) systems enable cellular networks to jointly operate as communication technology and sense the environment. While opportunities and potential performance have been largely investigated in simulations, few experimental works have showcased Automatic Target Recognition (ATR) effectiveness in a real-world deployment based on cellular radio units. To bridge this gap, this paper presents an initial study investigating the feasibility of ATR for ISAC. Our ATR solution uses a Deep Learning (DL)-based detector to infer the target class directly from the radar images generated by the ISAC system. The DL detector is evaluated with experimental data from a ISAC testbed based on commercially available mmWave radio units in the ARENA 2036 industrial research campus located in Stuttgart, Germany. Experimental results demonstrate accurate classification performance, demonstrating the feasibility of ATR ISAC with cellular hardware in our setup. We finally provide insights about the open generalization challenges, that will fuel future work on the topic.
Bayesian Federated Learning for Continual Training
Apr 21, 2025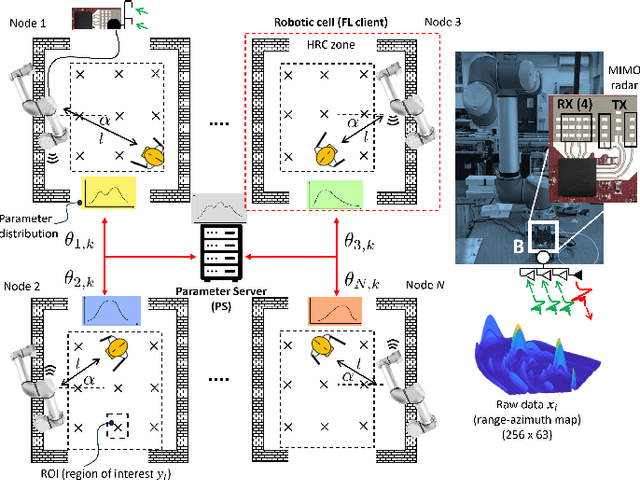
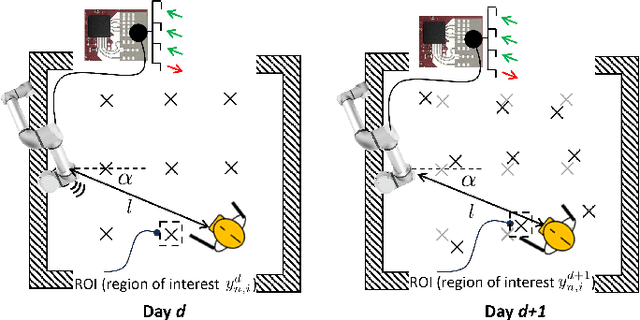
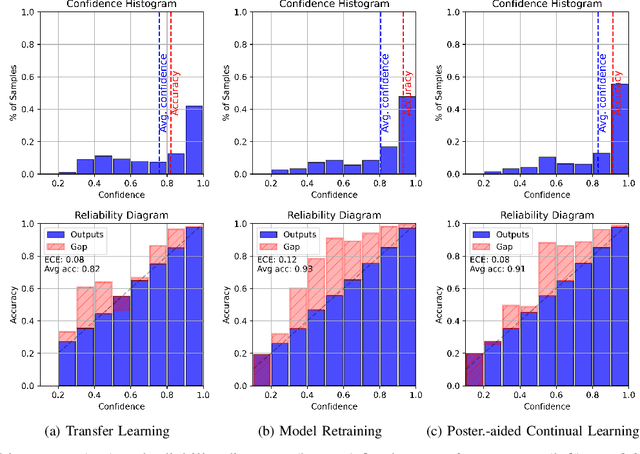
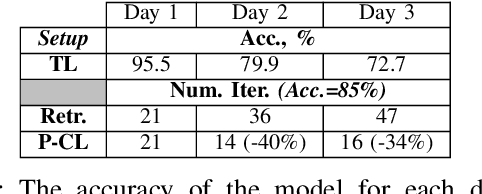
Bayesian Federated Learning (BFL) enables uncertainty quantification and robust adaptation in distributed learning. In contrast to the frequentist approach, it estimates the posterior distribution of a global model, offering insights into model reliability. However, current BFL methods neglect continual learning challenges in dynamic environments where data distributions shift over time. We propose a continual BFL framework applied to human sensing with radar data collected over several days. Using Stochastic Gradient Langevin Dynamics (SGLD), our approach sequentially updates the model, leveraging past posteriors to construct the prior for the new tasks. We assess the accuracy, the expected calibration error (ECE) and the convergence speed of our approach against several baselines. Results highlight the effectiveness of continual Bayesian updates in preserving knowledge and adapting to evolving data.
Compressed Bayesian Federated Learning for Reliable Passive Radio Sensing in Industrial IoT
May 09, 2024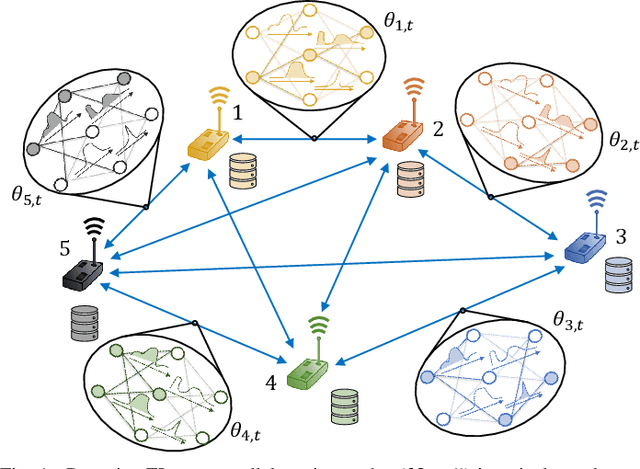
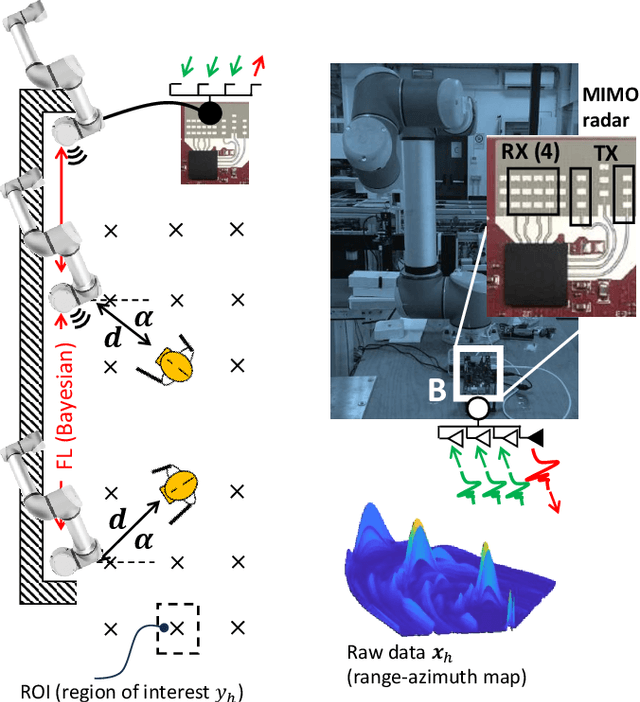
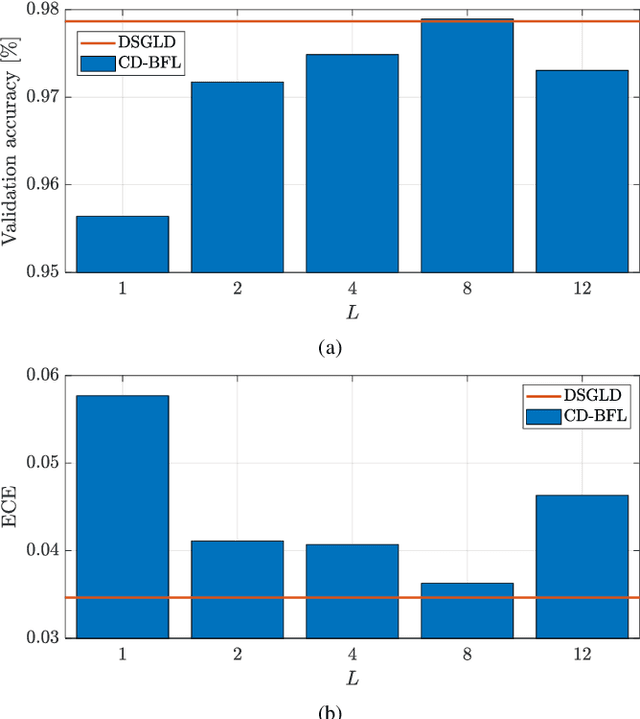
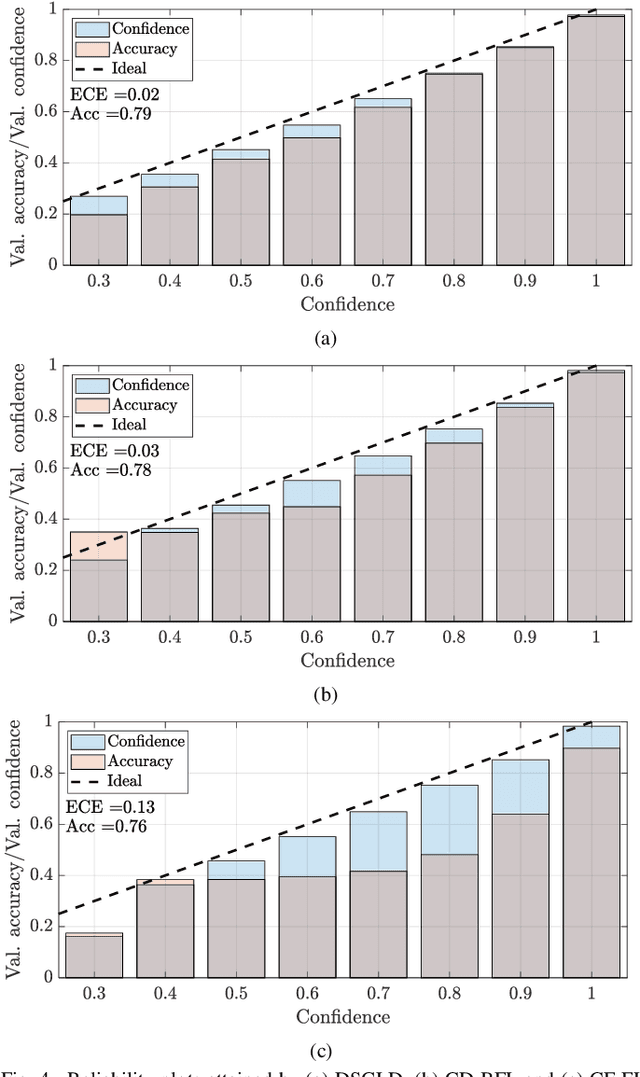
Bayesian Federated Learning (FL) has been recently introduced to provide well-calibrated Machine Learning (ML) models quantifying the uncertainty of their predictions. Despite their advantages compared to frequentist FL setups, Bayesian FL tools implemented over decentralized networks are subject to high communication costs due to the iterated exchange of local posterior distributions among cooperating devices. Therefore, this paper proposes a communication-efficient decentralized Bayesian FL policy to reduce the communication overhead without sacrificing final learning accuracy and calibration. The proposed method integrates compression policies and allows devices to perform multiple optimization steps before sending the local posterior distributions. We integrate the developed tool in an Industrial Internet of Things (IIoT) use case where collaborating nodes equipped with autonomous radar sensors are tasked to reliably localize human operators in a workplace shared with robots. Numerical results show that the developed approach obtains highly accurate yet well-calibrated ML models compatible with the ones provided by conventional (uncompressed) Bayesian FL tools while substantially decreasing the communication overhead (i.e., up to 99%). Furthermore, the proposed approach is advantageous when compared with state-of-the-art compressed frequentist FL setups in terms of calibration, especially when the statistical distribution of the testing dataset changes.
On the Impact of Data Heterogeneity in Federated Learning Environments with Application to Healthcare Networks
May 01, 2024



Federated Learning (FL) allows multiple privacy-sensitive applications to leverage their dataset for a global model construction without any disclosure of the information. One of those domains is healthcare, where groups of silos collaborate in order to generate a global predictor with improved accuracy and generalization. However, the inherent challenge lies in the high heterogeneity of medical data, necessitating sophisticated techniques for assessment and compensation. This paper presents a comprehensive exploration of the mathematical formalization and taxonomy of heterogeneity within FL environments, focusing on the intricacies of medical data. In particular, we address the evaluation and comparison of the most popular FL algorithms with respect to their ability to cope with quantity-based, feature and label distribution-based heterogeneity. The goal is to provide a quantitative evaluation of the impact of data heterogeneity in FL systems for healthcare networks as well as a guideline on FL algorithm selection. Our research extends beyond existing studies by benchmarking seven of the most common FL algorithms against the unique challenges posed by medical data use cases. The paper targets the prediction of the risk of stroke recurrence through a set of tabular clinical reports collected by different federated hospital silos: data heterogeneity frequently encountered in this scenario and its impact on FL performance are discussed.
A Secure and Trustworthy Network Architecture for Federated Learning Healthcare Applications
Apr 17, 2024



Federated Learning (FL) has emerged as a promising approach for privacy-preserving machine learning, particularly in sensitive domains such as healthcare. In this context, the TRUSTroke project aims to leverage FL to assist clinicians in ischemic stroke prediction. This paper provides an overview of the TRUSTroke FL network infrastructure. The proposed architecture adopts a client-server model with a central Parameter Server (PS). We introduce a Docker-based design for the client nodes, offering a flexible solution for implementing FL processes in clinical settings. The impact of different communication protocols (HTTP or MQTT) on FL network operation is analyzed, with MQTT selected for its suitability in FL scenarios. A control plane to support the main operations required by FL processes is also proposed. The paper concludes with an analysis of security aspects of the FL architecture, addressing potential threats and proposing mitigation strategies to increase the trustworthiness level.
Deep Learning-based Cooperative LiDAR Sensing for Improved Vehicle Positioning
Feb 26, 2024Accurate positioning is known to be a fundamental requirement for the deployment of Connected Automated Vehicles (CAVs). To meet this need, a new emerging trend is represented by cooperative methods where vehicles fuse information coming from navigation and imaging sensors via Vehicle-to-Everything (V2X) communications for joint positioning and environmental perception. In line with this trend, this paper proposes a novel data-driven cooperative sensing framework, termed Cooperative LiDAR Sensing with Message Passing Neural Network (CLS-MPNN), where spatially-distributed vehicles collaborate in perceiving the environment via LiDAR sensors. Vehicles process their LiDAR point clouds using a Deep Neural Network (DNN), namely a 3D object detector, to identify and localize possible static objects present in the driving environment. Data are then aggregated by a centralized infrastructure that performs Data Association (DA) using a Message Passing Neural Network (MPNN) and runs the Implicit Cooperative Positioning (ICP) algorithm. The proposed approach is evaluated using two realistic driving scenarios generated by a high-fidelity automated driving simulator. The results show that CLS-MPNN outperforms a conventional non-cooperative localization algorithm based on Global Navigation Satellite System (GNSS) and a state-of-the-art cooperative Simultaneous Localization and Mapping (SLAM) method while approaching the performances of an oracle system with ideal sensing and perfect association.
A Tutorial on 5G Positioning
Nov 17, 2023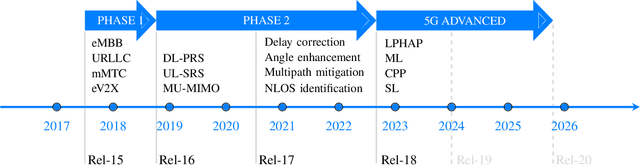



The widespread adoption of the fifth generation (5G) of cellular networks has brought new opportunities for localization-based services. High-precision positioning use cases and functionalities defined by the standards are drawing the interest of vertical industries. In the transition to the deployment, this paper aims to provide an in-depth tutorial on 5G positioning, summarizing the historical events that led to the standardization of cellular-based positioning, describing current and forthcoming releases of the Third Generation Partnership Project (3GPP) standard, and discussing about the major research trends. This paper is intended to represent an exhaustive guide for researchers and practitioners by providing fundamental notions on wireless localization, comprehensive definitions of measurements and architectures, examples of algorithms, and details on simulation approaches. Our approach aims to merge practical aspects of enabled use cases and related requirements with theoretical methodologies and fundamental bounds, allowing to understand the trade-off between system complexity and achievable, i.e., tangible, benefits of 5G positioning services. We also discuss about current limitations to be resolved for delivering accurate positioning solutions. We evaluate the performances of 3GPP Rel-16 positioning in outdoor and indoor environments, providing thorough analyses of the effect of changing the system configuration.
A Carbon Tracking Model for Federated Learning: Impact of Quantization and Sparsification
Oct 12, 2023



Federated Learning (FL) methods adopt efficient communication technologies to distribute machine learning tasks across edge devices, reducing the overhead in terms of data storage and computational complexity compared to centralized solutions. Rather than moving large data volumes from producers (sensors, machines) to energy-hungry data centers, raising environmental concerns due to resource demands, FL provides an alternative solution to mitigate the energy demands of several learning tasks while enabling new Artificial Intelligence of Things (AIoT) applications. This paper proposes a framework for real-time monitoring of the energy and carbon footprint impacts of FL systems. The carbon tracking tool is evaluated for consensus (fully decentralized) and classical FL policies. For the first time, we present a quantitative evaluation of different computationally and communication efficient FL methods from the perspectives of energy consumption and carbon equivalent emissions, suggesting also general guidelines for energy-efficient design. Results indicate that consensus-driven FL implementations should be preferred for limiting carbon emissions when the energy efficiency of the communication is low (i.e., < 25 Kbit/Joule). Besides, quantization and sparsification operations are shown to strike a balance between learning performances and energy consumption, leading to sustainable FL designs.
Channel-driven Decentralized Bayesian Federated Learning for Trustworthy Decision Making in D2D Networks
Oct 19, 2022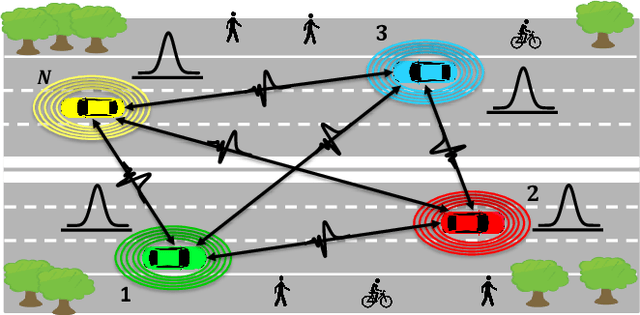
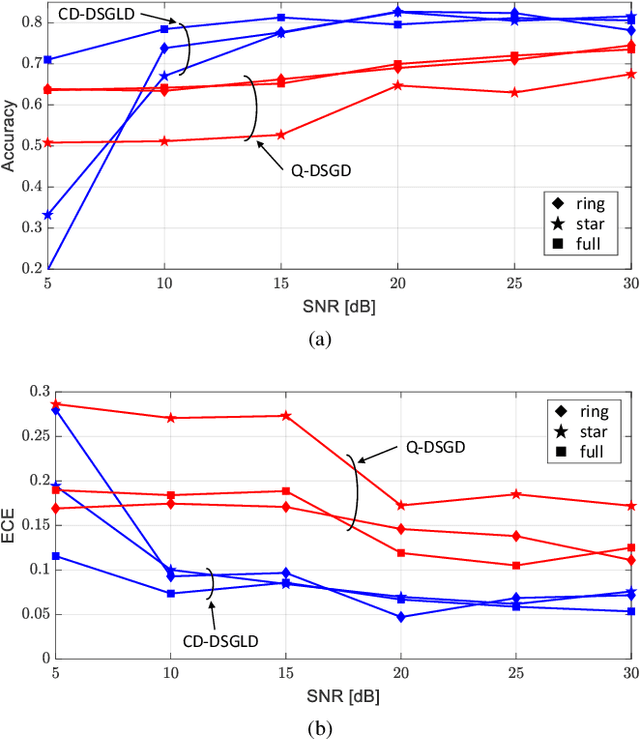
Bayesian Federated Learning (FL) offers a principled framework to account for the uncertainty caused by limitations in the data available at the nodes implementing collaborative training. In Bayesian FL, nodes exchange information about local posterior distributions over the model parameters space. This paper focuses on Bayesian FL implemented in a device-to-device (D2D) network via Decentralized Stochastic Gradient Langevin Dynamics (DSGLD), a recently introduced gradient-based Markov Chain Monte Carlo (MCMC) method. Based on the observation that DSGLD applies random Gaussian perturbations of model parameters, we propose to leverage channel noise on the D2D links as a mechanism for MCMC sampling. The proposed approach is compared against a conventional implementation of frequentist FL based on compression and digital transmission, highlighting advantages and limitations.
Motion Estimation and Compensation in Automotive MIMO SAR
Jan 25, 2022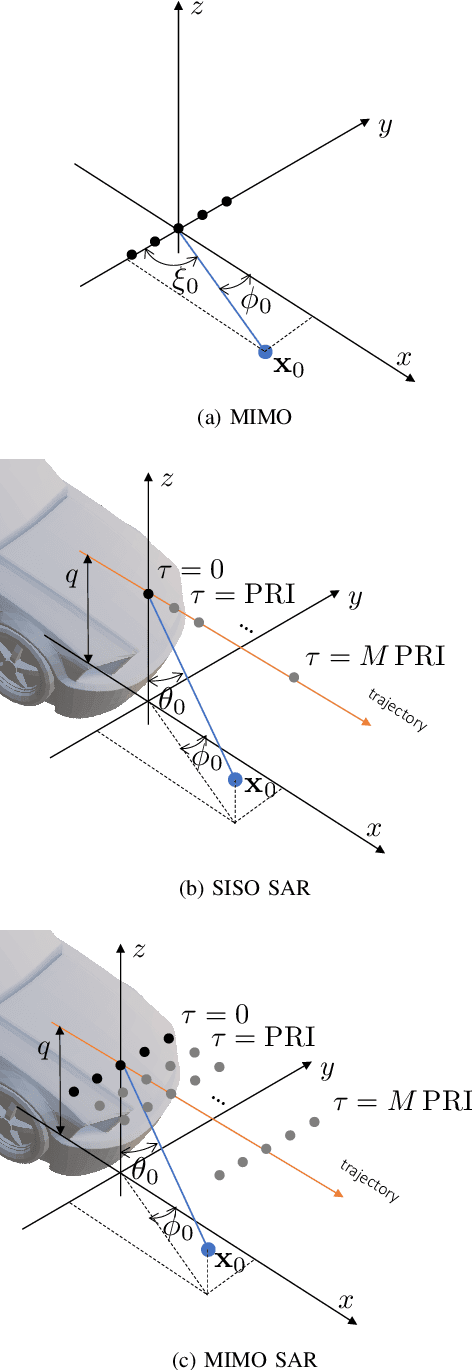
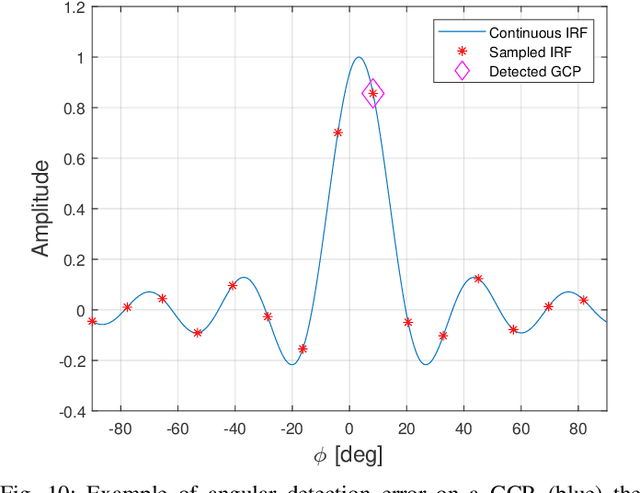
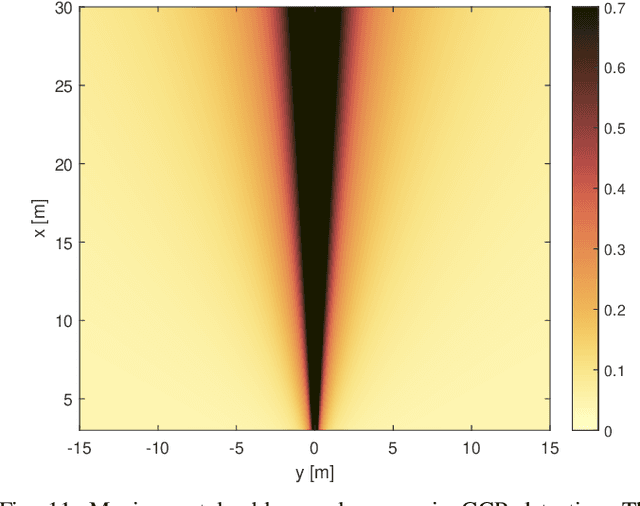

With the advent of self-driving vehicles, autonomous driving systems will have to rely on a vast number of heterogeneous sensors to perform dynamic perception of the surrounding environment. Synthetic Aperture Radar (SAR) systems increase the resolution of conventional mass-market radars by exploiting the vehicle's ego-motion, requiring a very accurate knowledge of the trajectory, usually not compatible with automotive-grade navigation systems. In this regard, this paper deals with the analysis, estimation and compensation of trajectory estimation errors in automotive SAR systems, proposing a complete residual motion estimation and compensation workflow. We start by defining the geometry of the acquisition and the basic processing steps of Multiple-Input Multiple-Output (MIMO) SAR systems. Then, we analytically derive the effects of typical motion errors in automotive SAR imaging. Based on the derived models, the procedure is detailed, outlining the guidelines for its practical implementation. We show the effectiveness of the proposed technique by means of experimental data gathered by a 77 GHz radar mounted in a forward looking configuration.