 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMismatch Analysis and Cooperative Calibration of Array Beam Patterns for ISAC Systems
Feb 01, 2026Integrated sensing and communication (ISAC) is a key technology for enabling a wide range of applications in future wireless systems. However, the sensing performance is often degraded by model mismatches caused by geometric errors (e.g., position and orientation) and hardware impairments (e.g., mutual coupling and amplifier non-linearity). This paper focuses on the angle estimation performance with antenna arrays and tackles the critical challenge of array beam pattern calibration for ISAC systems. To assess calibration quality from a sensing perspective, a novel performance metric that accounts for angle estimation error, rather than beam pattern similarity, is proposed and incorporated into a differentiable loss function. Additionally, a cooperative calibration framework is introduced, allowing multiple user equipments to iteratively optimize the beam pattern based on the proposed loss functions and local data, and collaboratively update global calibration parameters. The proposed models and algorithms are validated using real-world beam pattern measurements collected in an anechoic chamber. Experimental results show that the angle estimation error can be reduced from {$\textbf{1.01}^\circ$} to $\textbf{0.11}^\circ$ in 2D calibration scenarios, and from $\textbf{5.19}^\circ$ to $\textbf{0.86}^\circ$ in 3D calibration ones.
Optimal Placement of Movable Antennas for Angle-of-Departure Estimation Under User Location Uncertainty
Jan 29, 2026Movable antennas (MA) have gained significant attention in recent years to overcome the limitations of extremely large antenna arrays in terms of cost and power consumption. In this paper, we investigate the use of MA arrays at the base station (BS) for angle-of-departure (AoD) estimation under uncertainty in the user equipment (UE) location. Specifically, we (i) derive the theoretical performance limits through the Cramér-Rao bound (CRB) and (ii) optimize the antenna positions to ensure robust performance within the UE's uncertainty region. Numerical results show that dynamically optimizing antenna placement by explicitly considering the uncertainty region yields superior performance compared to fixed arrays, demonstrating the ability of MA systems to adapt and outperform conventional arrays.
Vehicular Wireless Positioning -- A Survey
Jan 28, 2026The rapid advancement of connected and autonomous vehicles has driven a growing demand for precise and reliable positioning systems capable of operating in complex environments. Meeting these demands requires an integrated approach that combines multiple positioning technologies, including wireless-based systems, perception-based technologies, and motion-based sensors. This paper presents a comprehensive survey of wireless-based positioning for vehicular applications, with a focus on satellite-based positioning (such as global navigation satellite systems (GNSS) and low-Earth-orbit (LEO) satellites), cellular-based positioning (5G and beyond), and IEEE-based technologies (including Wi-Fi, ultrawideband (UWB), Bluetooth, and vehicle-to-vehicle (V2V) communications). First, the survey reviews a wide range of vehicular positioning use cases, outlining their specific performance requirements. Next, it explores the historical development, standardization, and evolution of each wireless positioning technology, providing an in-depth categorization of existing positioning solutions and algorithms, and identifying open challenges and contemporary trends. Finally, the paper examines sensor fusion techniques that integrate these wireless systems with onboard perception and motion sensors to enhance positioning accuracy and resilience in real-world conditions. This survey thus offers a holistic perspective on the historical foundations, current advancements, and future directions of wireless-based positioning for vehicular applications, addressing a critical gap in the literature.
Monostatic ISAC Without Full Buffers: Revisiting Spatial Trade-Offs Under Bursty Traffic
Jan 19, 2026This work investigates the spatial trade-offs arising from the design of the transmit beamformer in a monostatic integrated sensing and communication (ISAC) base station (BS) under bursty traffic, a crucial aspect necessitated by the integration of communication and sensing functionalities in next-generation wireless systems. In this setting, the BS does not always have data available for transmission. This study compares different ISAC policies and reveals the presence of multiple effects influencing ISAC performance: signal-to-noise ratio (SNR) boosting of data-aided strategies compared to pilot-based ones, saturation of the probability of detection in data-aided strategies due to the non-full-buffer assumption, and, finally, directional masking of sensing targets due to the relative position between target and user. Simulation results demonstrate varying impact of these effects on ISAC trade-offs under different operating conditions, thus guiding the design of efficient ISAC transmission strategies.
6G OFDM Communications with High Mobility Transceivers and Scatterers via Angle-Domain Processing and Deep Learning
Jan 19, 2026High-mobility communications, which are crucial for next-generation wireless systems, cause the orthogonal frequency division multiplexing (OFDM) waveform to suffer from strong intercarrier interference (ICI) due to the Doppler effect. In this work, we propose a novel receiver architecture for OFDM that leverages the angular domain to separate multipaths. A block-type pilot is sent to estimate direction-of-arrivals (DoAs), propagation delays, and channel gains of the multipaths. Subsequently, a decision-directed (DD) approach is employed to estimate and iteratively refine the Dopplers. Two different approaches are investigated to provide initial Doppler estimates: an error vector magnitude (EVM)-based method and a deep learning (DL)-based method. Simulation results reveal that the DL-based approach allows for constant bit error rate (BER) performance up to the maximum 6G speed of 1000 km/h.
Multi-band Carrier Phase Positioning toward 6G: Performance Bounds and Efficient Estimators
Jan 08, 2026In addition to satellite systems, carrier phase positioning (CPP) is gaining attraction also in terrestrial mobile networks, particularly in 5G New Radio evolution toward 6G. One key challenge is to resolve the integer ambiguity problem, as the carrier phase provides only relative position information. This work introduces and studies a multi-band CPP scenario with intra- and inter-band carrier aggregation (CA) opportunities across FR1, mmWave-FR2, and emerging 6G FR3 bands. Specifically, we derive multi-band CPP performance bounds, showcasing the superiority of multi-band CPP for high-precision localization in current and future mobile networks, while noting also practical imperfections such as clock offsets between the user equipment (UE) and the network as well as mutual clock imperfections between the network nodes. A wide collection of numerical results is provided, covering the impacts of the available carrier bandwidth, number of aggregated carriers, transmit power, and the number of network nodes or base stations. The offered results highlight that only two carriers suffice to substantially facilitate resolving the integer ambiguity problem while also largely enhancing the robustness of positioning against imperfections imposed by the network-side clocks and multi-path propagation. In addition, we also propose a two-stage practical estimator that achieves the derived bounds under all realistic bandwidth and transmit power conditions. Furthermore, we show that with an additional search-based refinement step, the proposed estimator becomes particularly suitable for narrowband Internet of Things applications operating efficiently even under narrow carrier bandwidths. Finally, both the derived bounds and the proposed estimators are extended to scenarios where the bands assigned to each base station are nonuniform or fully disjoint, enhancing the practical deployment flexibility.
Phase-Coherent D-MIMO ISAC: Multi-Target Estimation and Spectral Efficiency Trade-Offs
Dec 26, 2025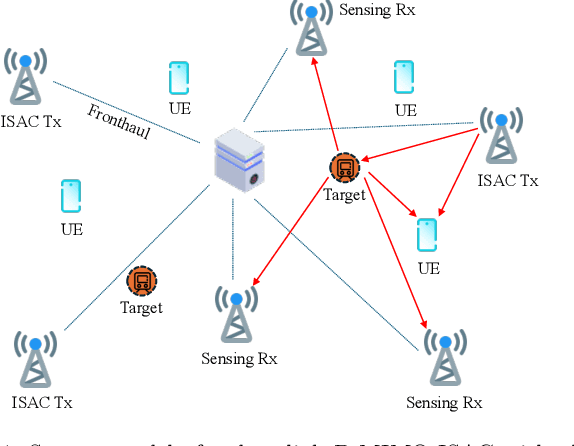

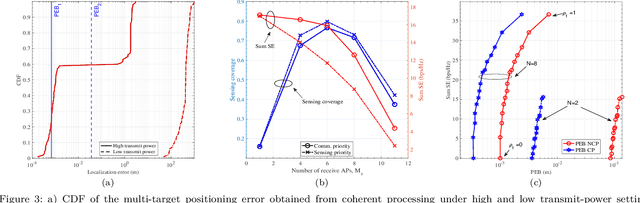
We investigate distributed multiple-input multiple-output (D-MIMO) integrated sensing and communication (ISAC) systems, in which multiple phase-synchronized access points (APs) jointly serve user equipments (UEs) while cooperatively detecting and estimating multiple static targets. To achieve high-accuracy multi-target estimation, we propose a two-stage sensing framework combining non-coherent and coherent maximum-likelihood (ML) estimation. In parallel, adaptive AP mode-selection strategies are introduced to balance communication and sensing performance: a communication-centric scheme that maximizes downlink spectral efficiency (SE) and a sensing-centric scheme that selects geometrically diverse receive APs to enhance sensing coverage. Simulation results confirm the SE-sensing trade-off, where appropriate power allocation between communication and sensing and larger array apertures alleviate performance degradation, achieving high SE with millimeter-level sensing precision. We further demonstrate that the proposed AP-selection strategy reveals an optimal number of receive APs that maximizes sensing coverage without significantly sacrificing SE.
Semantic Communication for Rate-Limited Closed-Loop Distributed Communication-Sensing-Control Systems
Dec 22, 2025



The growing integration of distributed integrated sensing and communication (ISAC) with closed-loop control in intelligent networks demands efficient information transmission under stringent bandwidth constraints. To address this challenge, this paper proposes a unified framework for goal-oriented semantic communication in distributed SCC systems. Building upon Weaver's three-level model, we establish a hierarchical semantic formulation with three error levels (L1: observation reconstruction, L2: state estimation, and L3: control) to jointly optimize their corresponding objectives. Based on this formulation, we propose a unified goal-oriented semantic compression and rate adaptation framework that is applicable to different semantic error levels and optimization goals across the SCC loop. A rate-limited multi-sensor LQR system is used as a case study to validate the proposed framework. We employ a GRU-based AE for semantic compression and a PPO-based rate adaptation algorithm that dynamically allocates transmission rates across sensors. Results show that the proposed framework effectively captures task-relevant semantics and adapts its resource allocation strategies across different semantic levels, thereby achieving level-specific performance gains under bandwidth constraints.
Sparse OFDM Design for Interference and Ambiguity Mitigation in Multi-Static ISAC
Dec 16, 2025

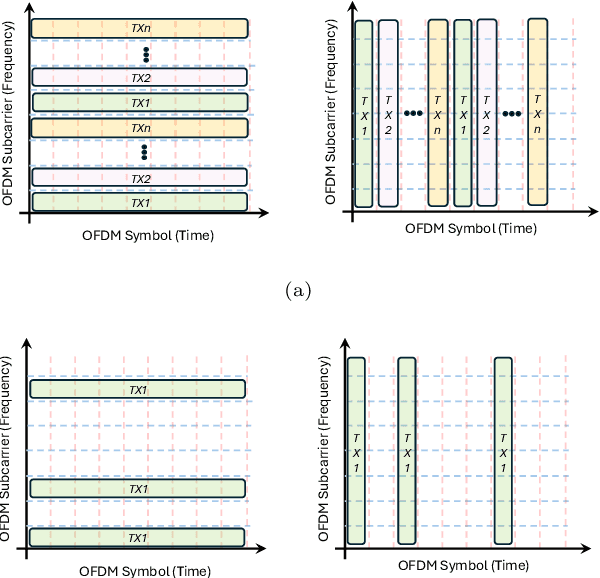

The sixth-generation (6G) wireless networks promises the integration of radar-like sensing capabilities into communication infrastructure. In this paper, we investigate a multi-static sensing framework where half-duplex base stations (BSs) are assigned as either transmitter or sensing receiver nodes. We propose a randomized sparse resource allocation scheme based on orthogonal frequency division multiplexing (OFDM) waveform design tailored for the multi-static scenario to simultaneously mitigate inter-BS interference (IBI) and sensing ambiguities. The waveform design also ensures robustness against inter-symbol interference (ISI) and intercarrier interference (ICI) via a judicious choice of subcarrier spacing according to the deployment of BSs. The potential ambiguity caused by sparse signaling is addressed through controlled irregularity in both time and frequency domains, with a negligible noise floor elevation. Simulation results demonstrate the effectiveness and resilience of the proposed design in the presence of multiple targets and clutter.
POLO: Phase-Only Localization in Uplink Distributed MIMO Systems
Dec 10, 2025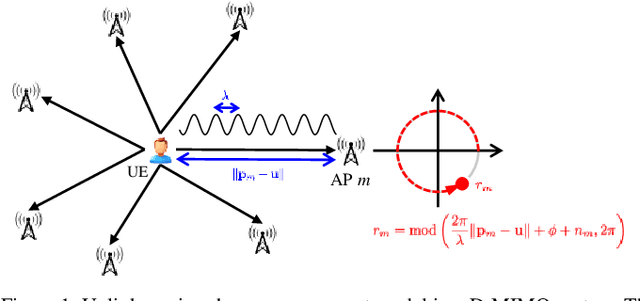

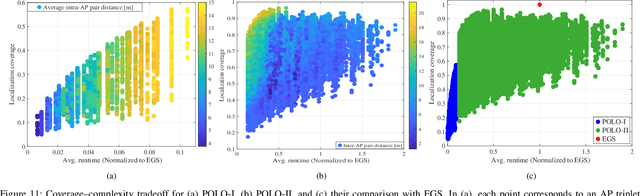
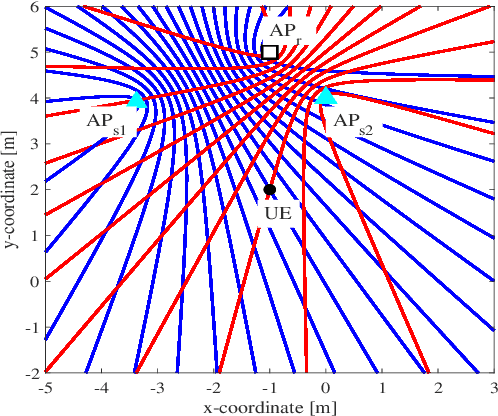
We propose a low-complexity localization framework for uplink distributed MIMO (D-MIMO) systems, targeting the challenge of minimizing the highly spiky maximum-likelihood (ML) cost function that arises in sparsely deployed phasecoherent access points (APs) with narrowband transmission. In such systems, ML-based localization typically relies on dense grid search, incurring prohibitive computational complexity. To address this, we introduce phase-only localization (POLO), an approach that leverages differential carrier-phase measurements from selected APs to generate a compact set of candidate user positions. The ML cost function is then evaluated only at these candidates, reducing complexity significantly. A key challenge is to devise an AP selection mechanism that reduces the number of candidate points while maintaining reliable coverage. We propose two variants: POLO-I, which selects three APs to provide closed-form candidate positions with low computational cost, and POLO-II, which selects four APs using an alternative strategy that enhances coverage at marginally higher runtime. Comprehensive analytical and simulation results show that POLO achieves a favorable coverage-complexity trade-off, reducing cost by orders of magnitude relative to exhaustive grid search with only marginal loss in coverage. By characterizing this tradeoff under diverse AP configurations, we also provide practical guidelines for selecting between POLO-I and POLO-II depending on latency and coverage requirements.