 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhase-Only Positioning in Distributed MIMO Under Phase Impairments: AP Selection Using Deep Learning
Feb 04, 2026Carrier phase positioning (CPP) can enable cm-level accuracy in next-generation wireless systems, while recent literature shows that accuracy remains high using phase-only measurements in distributed MIMO (D-MIMO). However, the impact of phase synchronization errors on such systems remains insufficiently explored. To address this gap, we first show that the proposed hyperbola intersection method achieves highly accurate positioning even in the presence of phase synchronization errors, when trained on appropriate data reflecting such impairments. We then introduce a deep learning (DL)-based D-MIMO antenna point (AP) selection framework that ensures high-precision localization under phase synchronization errors. Simulation results show that the proposed framework improves positioning accuracy compared to prior-art methods, while reducing inference complexity by approximately 19.7%.
Multi-band Carrier Phase Positioning toward 6G: Performance Bounds and Efficient Estimators
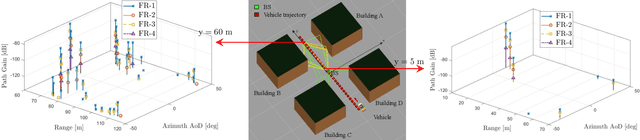
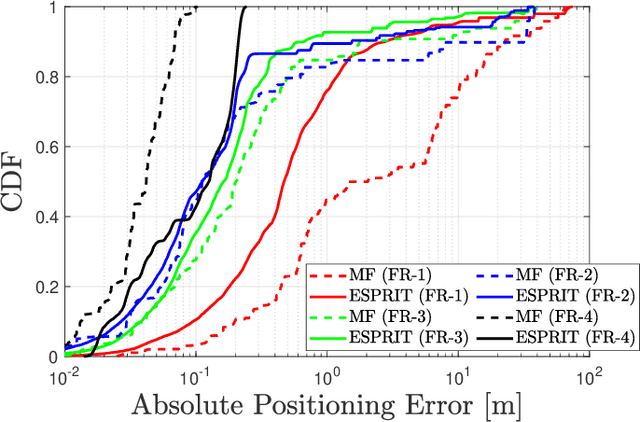
Jan 08, 2026In addition to satellite systems, carrier phase positioning (CPP) is gaining attraction also in terrestrial mobile networks, particularly in 5G New Radio evolution toward 6G. One key challenge is to resolve the integer ambiguity problem, as the carrier phase provides only relative position information. This work introduces and studies a multi-band CPP scenario with intra- and inter-band carrier aggregation (CA) opportunities across FR1, mmWave-FR2, and emerging 6G FR3 bands. Specifically, we derive multi-band CPP performance bounds, showcasing the superiority of multi-band CPP for high-precision localization in current and future mobile networks, while noting also practical imperfections such as clock offsets between the user equipment (UE) and the network as well as mutual clock imperfections between the network nodes. A wide collection of numerical results is provided, covering the impacts of the available carrier bandwidth, number of aggregated carriers, transmit power, and the number of network nodes or base stations. The offered results highlight that only two carriers suffice to substantially facilitate resolving the integer ambiguity problem while also largely enhancing the robustness of positioning against imperfections imposed by the network-side clocks and multi-path propagation. In addition, we also propose a two-stage practical estimator that achieves the derived bounds under all realistic bandwidth and transmit power conditions. Furthermore, we show that with an additional search-based refinement step, the proposed estimator becomes particularly suitable for narrowband Internet of Things applications operating efficiently even under narrow carrier bandwidths. Finally, both the derived bounds and the proposed estimators are extended to scenarios where the bands assigned to each base station are nonuniform or fully disjoint, enhancing the practical deployment flexibility.
Sensing with Mobile Devices through Radio SLAM: Models, Methods, Opportunities, and Challenges
Sep 09, 2025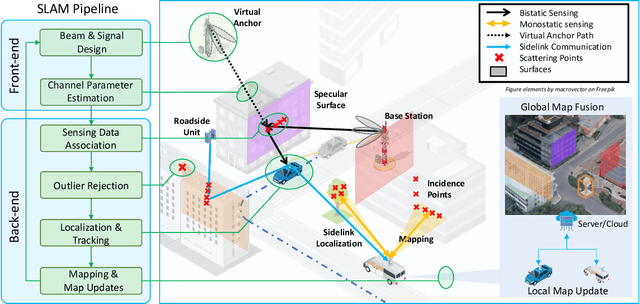
The integration of sensing and communication (ISAC) is a cornerstone of 6G, enabling simultaneous environmental awareness and communication. This paper explores radio SLAM (simultaneous localization and mapping) as a key ISAC approach, using radio signals for mapping and localization. We analyze radio SLAM across different frequency bands, discussing trade-offs in coverage, resolution, and hardware requirements. We also highlight opportunities for integration with sensing, positioning, and cooperative networks. The findings pave the way for standardized solutions in 6G applications such as autonomous systems and industrial robotics.
Failure Tolerant Phase-Only Indoor Positioning via Deep Learning
Aug 20, 2025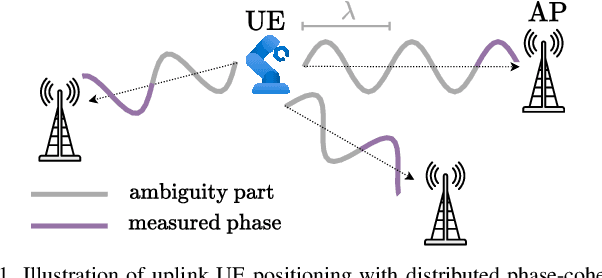
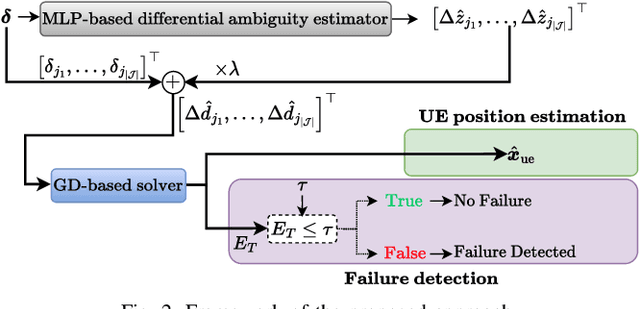
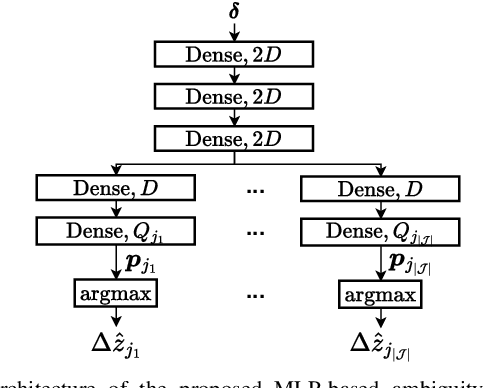
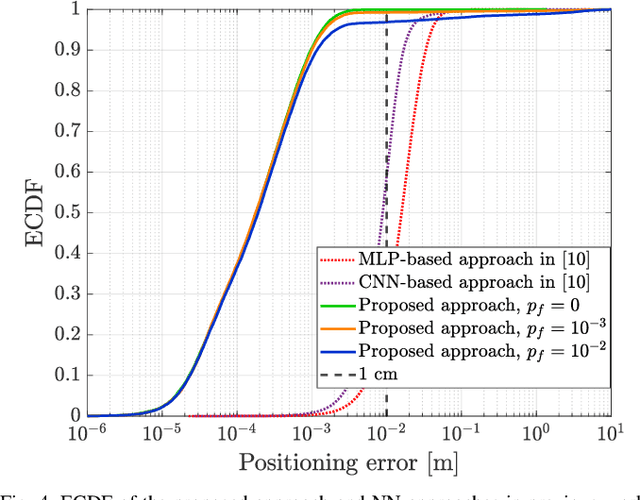
High-precision localization turns into a crucial added value and asset for next-generation wireless systems. Carrier phase positioning (CPP) enables sub-meter to centimeter-level accuracy and is gaining interest in 5G-Advanced standardization. While CPP typically complements time-of-arrival (ToA) measurements, recent literature has introduced a phase-only positioning approach in a distributed antenna/MIMO system context with minimal bandwidth requirements, using deep learning (DL) when operating under ideal hardware assumptions. In more practical scenarios, however, antenna failures can largely degrade the performance. In this paper, we address the challenging phase-only positioning task, and propose a new DL-based localization approach harnessing the so-called hyperbola intersection principle, clearly outperforming the previous methods. Additionally, we consider and propose a processing and learning mechanism that is robust to antenna element failures. Our results show that the proposed DL model achieves robust and accurate positioning despite antenna impairments, demonstrating the viability of data-driven, impairment-tolerant phase-only positioning mechanisms. Comprehensive set of numerical results demonstrates large improvements in localization accuracy against the prior art methods.
Phase-Only Positioning: Overcoming Integer Ambiguity Challenge through Deep Learning
Jun 09, 2025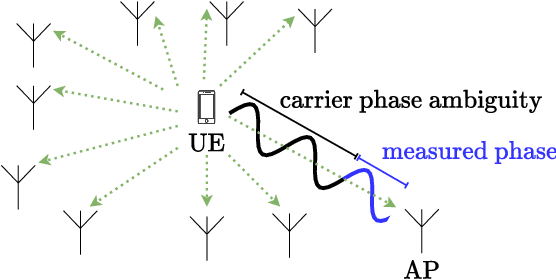
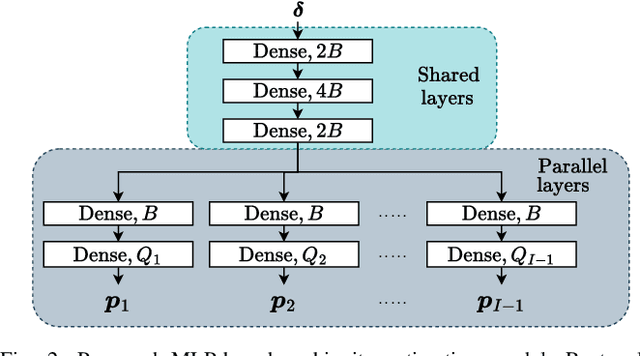
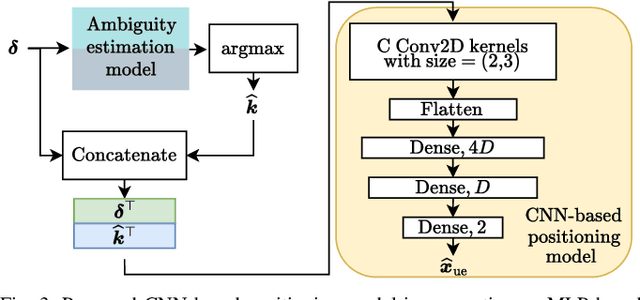
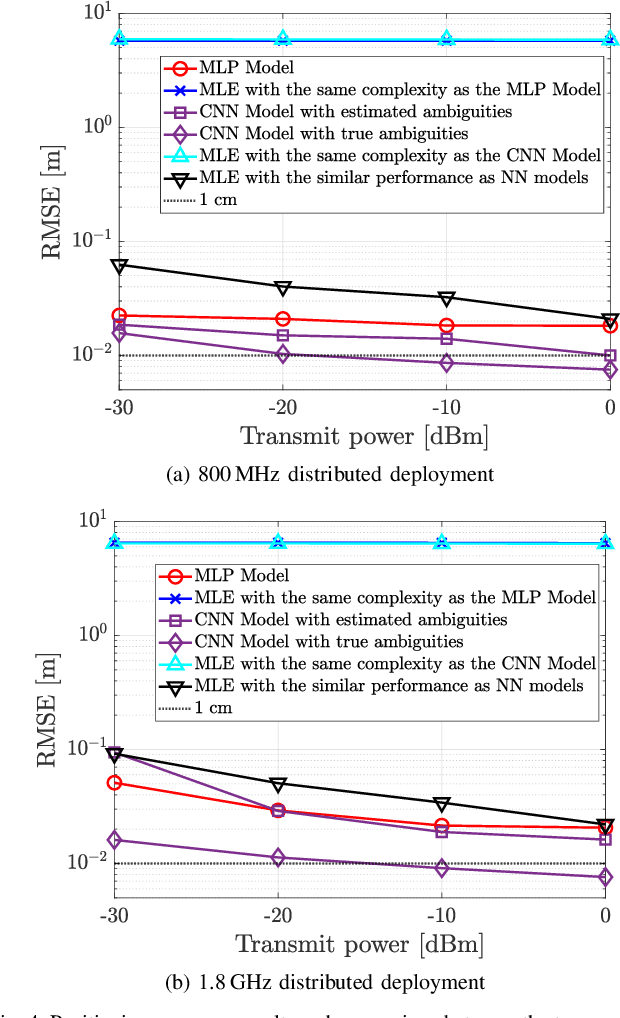
This paper investigates uplink carrier phase positioning (CPP) in cell-free (CF) or distributed antenna system context, assuming a challenging case where only phase measurements are utilized as observations. In general, CPP can achieve sub-meter to centimeter-level accuracy but is challenged by the integer ambiguity problem. In this work, we propose two deep learning approaches for phase-only positioning, overcoming the integer ambiguity challenge. The first one directly uses phase measurements, while the second one first estimates integer ambiguities and then integrates them with phase measurements for improved accuracy. Our numerical results demonstrate that an inference complexity reduction of two to three orders of magnitude is achieved, compared to maximum likelihood baseline solution, depending on the approach and parameter configuration. This emphasizes the potential of the developed deep learning solutions for efficient and precise positioning in future CF 6G systems.
Target Handover in Distributed Integrated Sensing and Communication
Nov 04, 2024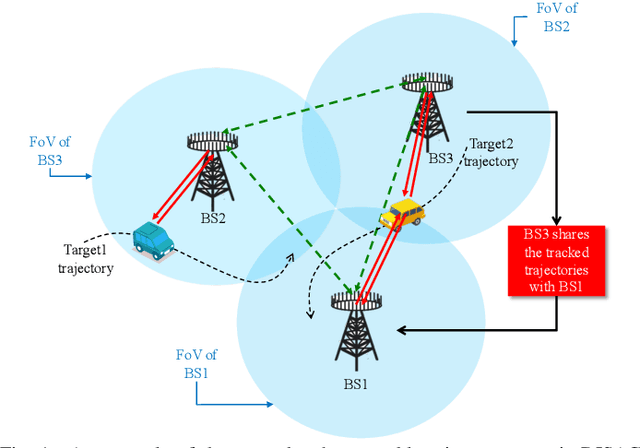
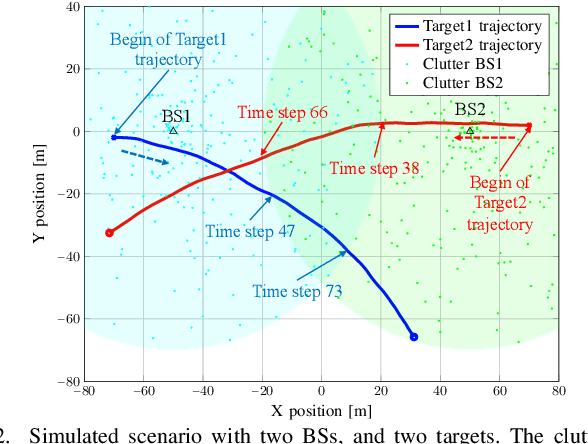
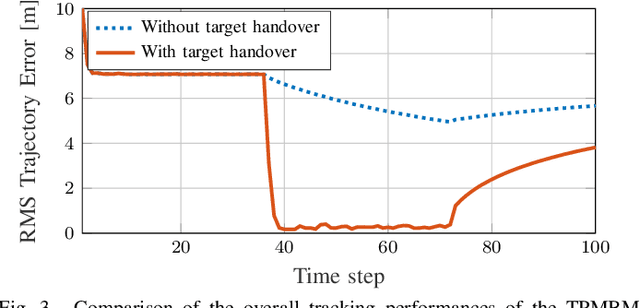
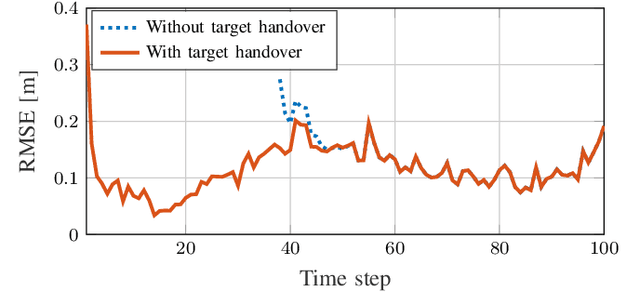
The concept of 6G distributed integrated sensing and communications (DISAC) builds upon the functionality of integrated sensing and communications (ISAC) by integrating distributed architectures, significantly enhancing both sensing and communication coverage and performance. In 6G DISAC systems, tracking target trajectories requires base stations (BSs) to hand over their tracked targets to neighboring BSs. Determining what information to share, where, how, and when is critical to effective handover. This paper addresses the target handover challenge in DISAC systems and introduces a method enabling BSs to share essential target trajectory information at appropriate time steps, facilitating seamless handovers to other BSs. The target tracking problem is tackled using the standard trajectory Poisson multi-Bernoulli mixture (TPMBM) filter, enhanced with the proposed handover algorithm. Simulation results confirm the effectiveness of the implemented tracking solution.
Batch SLAM with PMBM Data Association Sampling and Graph-Based Optimization
Jul 16, 2024



Simultaneous localization and mapping (SLAM) methods need to both solve the data association (DA) problem and the joint estimation of the sensor trajectory and the map, conditioned on a DA. In this paper, we propose a novel integrated approach to solve both the DA problem and the batch SLAM problem simultaneously, combining random finite set (RFS) theory and the graph-based SLAM approach. A sampling method based on the Poisson multi-Bernoulli mixture (PMBM) density is designed for dealing with the DA uncertainty, and a graph-based SLAM solver is applied for the conditional SLAM problem. In the end, a post-processing approach is applied to merge SLAM results from different iterations. Using synthetic data, it is demonstrated that the proposed SLAM approach achieves performance close to the posterior Cram\'er-Rao bound, and outperforms state-of-the-art RFS-based SLAM filters in high clutter and high process noise scenarios.
Robust NLoS Localization in 5G mmWave Networks: Data-based Methods and Performance
Jun 24, 2024



Ensuring smooth mobility management while employing directional beamformed transmissions in 5G millimeter-wave networks calls for robust and accurate user equipment (UE) localization and tracking. In this article, we develop neural network-based positioning models with time- and frequency-domain channel state information (CSI) data in harsh non-line-of-sight (NLoS) conditions. We propose a novel frequency-domain feature extraction, which combines relative phase differences and received powers across resource blocks, and offers robust performance and reliability. Additionally, we exploit the multipath components and propose an aggregate time-domain feature combining time-of-flight, angle-of-arrival and received path-wise powers. Importantly, the temporal correlations are also harnessed in the form of sequence processing neural networks, which prove to be of particular benefit for vehicular UEs. Realistic numerical evaluations in large-scale line-of-sight (LoS)-obstructed urban environment with moving vehicles are provided, building on full ray-tracing based propagation modeling. The results show the robustness of the proposed CSI features in terms of positioning accuracy, and that the proposed models reliably localize UEs even in the absence of a LoS path, clearly outperforming the state-of-the-art with similar or even reduced processing complexity. The proposed sequence-based neural network model is capable of tracking the UE position, speed and heading simultaneously despite the strong uncertainties in the CSI measurements. Finally, it is shown that differences between the training and online inference environments can be efficiently addressed and alleviated through transfer learning.
Robust Snapshot Radio SLAM
Apr 16, 2024



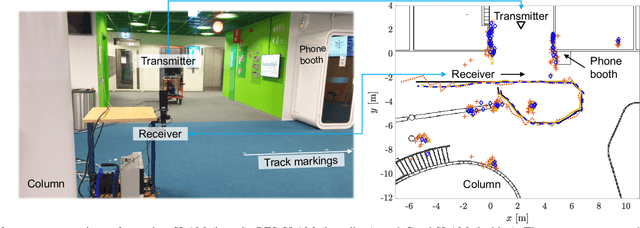
The intrinsic geometric connections between millimeter-wave (mmWave) signals and the propagation environment can be leveraged for simultaneous localization and mapping (SLAM) in 5G and beyond networks. However, estimated channel parameters that are mismatched to the utilized geometric model can cause the SLAM solution to degrade. In this paper, we propose a robust snapshot radio SLAM algorithm for mixed line-of-sight (LoS) and non-line-of-sight (NLoS) environments that can estimate the unknown user equipment (UE) state, map of the environment as well as the presence of the LoS path. The proposed method can accurately detect outliers and the LoS path, enabling robust estimation in both LoS and NLoS conditions. The proposed method is validated using 60 GHz experimental data, indicating superior performance compared to the state-of-the-art.
Millimeter-wave Radio SLAM: End-to-End Processing Methods and Experimental Validation
Dec 21, 2023In this article, we address the timely topic of cellular bistatic simultaneous localization and mapping (SLAM) with specific focus on complete processing solutions from raw I/Q samples to user equipment (UE) and landmark location information in millimeter-wave (mmWave) networks. Firstly, we propose a new multipath channel parameter estimation solution which operates directly with beam reference signal received power (BRSRP) measurements, alleviating the need to know the true antenna beampatterns or the underlying beamforming weights. Additionally, the method has built-in robustness against unavoidable antenna sidelobes. Secondly, we propose new snapshot SLAM algorithms that have increased robustness and identifiability compared to prior-art, in practical built environments with complex clutter and multi-bounce propagation scenarios. The performance of the proposed methods is assessed at the 60 GHz mmWave band, via both realistic ray-tracing evaluations as well as true experimental measurements, in an indoor environment. Wide set of offered results clearly demonstrate the improved performance, compared to the relevant prior-art, in terms of the channel parameter estimation as well as the end-to-end SLAM performance. Finally, the article provides the measured 60 GHz data openly available for the research community, facilitating results reproducibility as well as further algorithm development.