 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvidenceLens: A Claim-Evidence Matrix for Auditing Financial Question Answering
Jun 19, 2026Large language models are increasingly used to answer questions over annual reports, earnings decks, and analyst notes, yet their outputs remain difficult to verify in high-stakes financial workflows. A fluent answer can blend directly grounded statements, weak synthesis, and unsupported claims across narrative text, tables, and charts. We present EvidenceLens, a visual analytics prototype that treats financial question answering as a claim-evidence alignment problem. The system decomposes an answer into atomic claims, summarizes support composition and confidence, support gaps, and coordinates claim-level inspection with source passages, table cells, and chart regions. Its core visual representation is a multimodal claim-evidence matrix that makes coverage, contradiction, and modality imbalance immediately visible. To support reproducibility, we also specify a JSON-based artifact schema, a lightweight multimodal alignment pipeline, and a deterministic review-priority ranking that maps backend signals into an auditable visual structure. Through representative report-auditing scenarios, we show how EvidenceLens helps analysts distinguish grounded claims from overconfident synthesis that conventional chat interfaces flatten.
Efficient Implementations of Extended Object PMBM Filters with Blocked Gibbs Sampling
Apr 27, 2026This paper considers multiple extended object tracking based on Poisson multi-Bernoulli mixture (PMBM) filtering, which gives the closed-form Bayesian solution for standard multiple extended object models with Poisson birth. To efficiently address the challenging extended object data association problem in PMBM filtering, we develop implementations of the extended object PMBM filter using blocked Gibbs sampling. By formulating the PMBM density on an augmented state space with auxiliary variables and leveraging the Poisson object measurement model, we first derive a joint posterior over potential objects, previous global hypotheses, and current measurement association variables, together with its corresponding factorization. This factorized representation leads to blocked Gibbs samplers that efficiently generate high-weight global hypotheses and thereby provide an efficient implementation of the PMBM update step. We further introduce a collapsed Gibbs sampling variant, in which the Bernoulli object existence variables are marginalized out, yielding higher sampling efficiency, especially for the initiation of newly detected objects. The proposed methods, implemented under the gamma Gaussian inverse-Wishart model, are compared with an extended object Poisson multi-Bernoulli filter based on particle belief propagation. Simulation results demonstrate that the proposed approaches achieve comparable tracking performance while requiring substantially less runtime.
A Track-Before-Detect Trajectory Multi-Bernoulli Filter for Generalised Superpositional Measurements
Feb 02, 2026This paper proposes the Trajectory-Information Exchange Multi-Bernoulli (T-IEMB) filter to estimate sets of alive and all trajectories in track-before-detect applications with generalised superpositional measurements. This measurement model has superpositional hidden variables which are mapped to the conditional mean and covariance of the measurement, enabling it to describe a broad range of measurement models. This paper also presents a Gaussian implementation of the T-IEMB filter, which performs the update by approximating the conditional moments of the measurement model, and admits a computationally light filtering solution. Simulation results for a non-Gaussian radar-based tracking scenario demonstrate the performance of two Gaussian T-IEMB implementations, which provide improved tracking performance compared to a state-of-the-art particle filter based solution for track-before-detect, at a reduced computational cost.
Temporal parallelisation of continuous-time maximum-a-posteriori trajectory estimation
Dec 15, 2025This paper proposes a parallel-in-time method for computing continuous-time maximum-a-posteriori (MAP) trajectory estimates of the states of partially observed stochastic differential equations (SDEs), with the goal of improving computational speed on parallel architectures. The MAP estimation problem is reformulated as a continuous-time optimal control problem based on the Onsager-Machlup functional. This reformulation enables the use of a previously proposed parallel-in-time solution for optimal control problems, which we adapt to the current problem. The structure of the resulting optimal control problem admits a parallel solution based on parallel associative scan algorithms. In the linear Gaussian special case, it yields a parallel Kalman-Bucy filter and a parallel continuous-time Rauch-Tung-Striebel smoother. These linear computational methods are further extended to nonlinear continuous-time state-space models through Taylor expansions. We also present the corresponding parallel two-filter smoother. The graphics processing unit (GPU) experiments on linear and nonlinear models demonstrate that the proposed framework achieves a significant speedup in computations while maintaining the accuracy of sequential algorithms.
Proximal Approximate Inference in State-Space Models
Nov 19, 2025We present a class of algorithms for state estimation in nonlinear, non-Gaussian state-space models. Our approach is based on a variational Lagrangian formulation that casts Bayesian inference as a sequence of entropic trust-region updates subject to dynamic constraints. This framework gives rise to a family of forward-backward algorithms, whose structure is determined by the chosen factorization of the variational posterior. By focusing on Gauss--Markov approximations, we derive recursive schemes with favorable computational complexity. For general nonlinear, non-Gaussian models we close the recursions using generalized statistical linear regression and Fourier--Hermite moment matching.
Probabilistic Trajectory GOSPA: A Metric for Uncertainty-Aware Multi-Object Tracking Performance Evaluation
Jun 18, 2025This paper presents a generalization of the trajectory general optimal sub-pattern assignment (GOSPA) metric for evaluating multi-object tracking algorithms that provide trajectory estimates with track-level uncertainties. This metric builds on the recently introduced probabilistic GOSPA metric to account for both the existence and state estimation uncertainties of individual object states. Similar to trajectory GOSPA (TGOSPA), it can be formulated as a multidimensional assignment problem, and its linear programming relaxation--also a valid metric--is computable in polynomial time. Additionally, this metric retains the interpretability of TGOSPA, and we show that its decomposition yields intuitive costs terms associated to expected localization error and existence probability mismatch error for properly detected objects, expected missed and false detection error, and track switch error. The effectiveness of the proposed metric is demonstrated through a simulation study.
Histogram-Probabilistic Multi-Hypothesis Tracking with Integrated Target Existence
Apr 29, 2025The histogram-probabilistic multi-hypothesis tracker (H-PMHT) is a parametric approach to solving the multi-target track-before-detect (TBD) problem, using expectation maximisation (EM). A key limitation of this method is the assumption of a known and constant number of targets. In this paper, we propose the integrated existence Poisson histogram probabilistic multi-hypothesis tracker (IE-PHPMHT), for TBD of multiple targets. It extends the H-PMHT framework by adding a probability of existence to each potential target. For the derivation, we utilise a Poisson point process (PPP) measurement model and Bernoulli targets, allowing for a multi-Bernoulli birth process and an unknown, time-varying number of targets. Hence, integrated track management is achieved through the discrimination of track quality assessments based on existence probabilities. The algorithm is evaluated in a simulation study of two scenarios and is compared with several other algorithms, demonstrating its performance.
Poisson multi-Bernoulli mixture filter for trajectory measurements
Apr 11, 2025This paper presents a Poisson multi-Bernoulli mixture (PMBM) filter for multi-target filtering based on sensor measurements that are sets of trajectories in the last two-time step window. The proposed filter, the trajectory measurement PMBM (TM-PMBM) filter, propagates a PMBM density on the set of target states. In prediction, the filter obtains the PMBM density on the set of trajectories over the last two time steps. This density is then updated with the set of trajectory measurements. After the update step, the PMBM posterior on the set of two-step trajectories is marginalised to obtain a PMBM density on the set of target states. The filter provides a closed-form solution for multi-target filtering based on sets of trajectory measurements, estimating the set of target states at the end of each time window. Additionally, the paper proposes computationally lighter alternatives to the TM-PMBM filter by deriving a Poisson multi-Bernoulli (PMB) density through Kullback-Leibler divergence minimisation in an augmented space with auxiliary variables. The performance of the proposed filters are evaluated in a simulation study.
MTS: A Deep Reinforcement Learning Portfolio Management Framework with Time-Awareness and Short-Selling
Mar 06, 2025
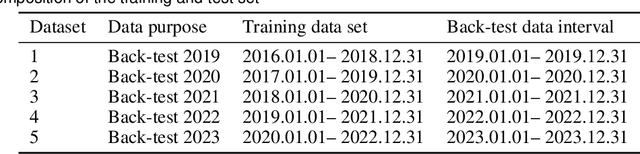
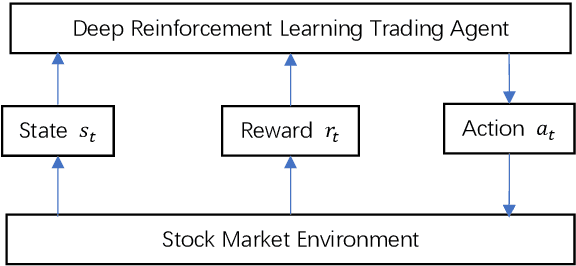
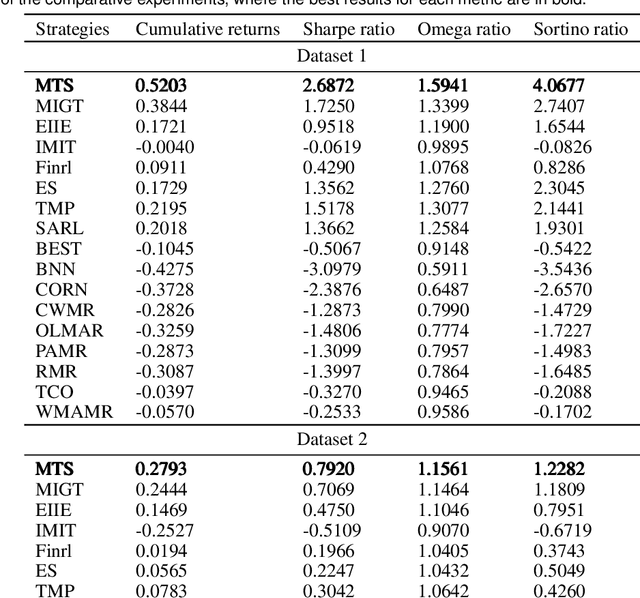
Portfolio management remains a crucial challenge in finance, with traditional methods often falling short in complex and volatile market environments. While deep reinforcement approaches have shown promise, they still face limitations in dynamic risk management, exploitation of temporal markets, and incorporation of complex trading strategies such as short-selling. These limitations can lead to suboptimal portfolio performance, increased vulnerability to market volatility, and missed opportunities in capturing potential returns from diverse market conditions. This paper introduces a Deep Reinforcement Learning Portfolio Management Framework with Time-Awareness and Short-Selling (MTS), offering a robust and adaptive strategy for sustainable investment performance. This framework utilizes a novel encoder-attention mechanism to address the limitations by incorporating temporal market characteristics, a parallel strategy for automated short-selling based on market trends, and risk management through innovative Incremental Conditional Value at Risk, enhancing adaptability and performance. Experimental validation on five diverse datasets from 2019 to 2023 demonstrates MTS's superiority over traditional algorithms and advanced machine learning techniques. MTS consistently achieves higher cumulative returns, Sharpe, Omega, and Sortino ratios, underscoring its effectiveness in balancing risk and return while adapting to market dynamics. MTS demonstrates an average relative increase of 30.67% in cumulative returns and 29.33% in Sharpe ratio compared to the next best-performing strategies across various datasets.
Probabilistic GOSPA: A Metric for Performance Evaluation of Multi-Object Filters with Uncertainties
Dec 16, 2024



This paper presents a probabilistic generalization of the generalized optimal subpattern assignment (GOSPA) metric, termed P-GOSPA metric. GOSPA is a popular metric for evaluating the distance between finite sets, typically in multi-object estimation applications. P-GOSPA extends GOSPA to the space of multi-Bernoulli set densities, incorporating the inherent uncertainty in probabilistic multi-object representations. In addition, P-GOSPA retains the interpretability of GOSPA, such as decomposability into localization, missed and false detection errors, in a sound manner. Examples and simulations are presented to demonstrate the efficacy of P-GOSPA.