 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoisson multi-Bernoulli mixture filter for trajectory measurements
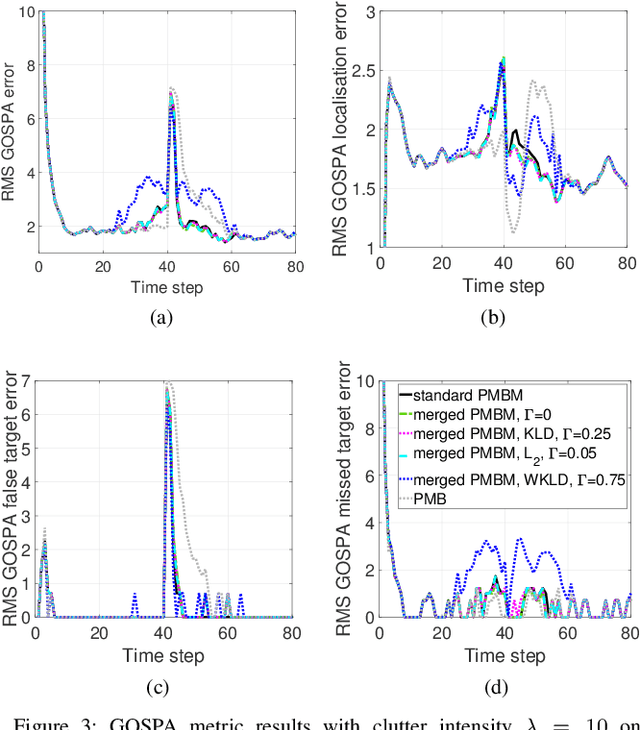
Apr 11, 2025This paper presents a Poisson multi-Bernoulli mixture (PMBM) filter for multi-target filtering based on sensor measurements that are sets of trajectories in the last two-time step window. The proposed filter, the trajectory measurement PMBM (TM-PMBM) filter, propagates a PMBM density on the set of target states. In prediction, the filter obtains the PMBM density on the set of trajectories over the last two time steps. This density is then updated with the set of trajectory measurements. After the update step, the PMBM posterior on the set of two-step trajectories is marginalised to obtain a PMBM density on the set of target states. The filter provides a closed-form solution for multi-target filtering based on sets of trajectory measurements, estimating the set of target states at the end of each time window. Additionally, the paper proposes computationally lighter alternatives to the TM-PMBM filter by deriving a Poisson multi-Bernoulli (PMB) density through Kullback-Leibler divergence minimisation in an augmented space with auxiliary variables. The performance of the proposed filters are evaluated in a simulation study.
Data-driven clustering and Bernoulli merging for the Poisson multi-Bernoulli mixture filter
May 27, 2022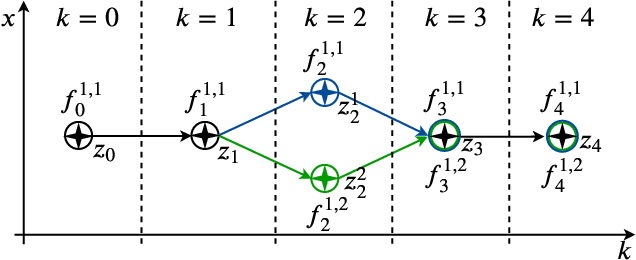

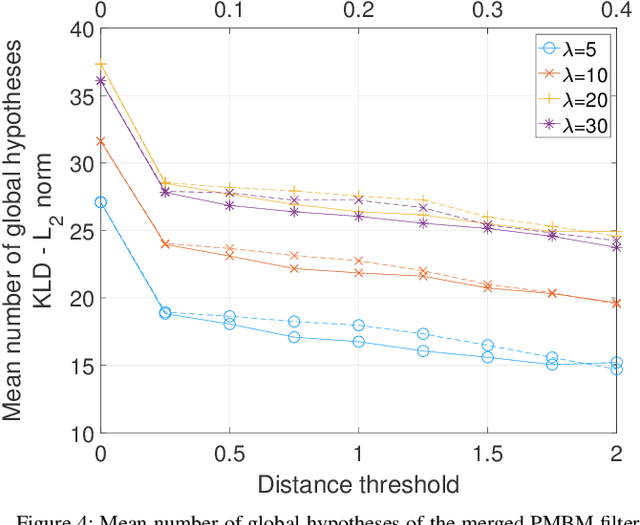
This paper proposes a clustering and merging approach for the Poisson multi-Bernoulli mixture (PMBM) filter to lower its computational complexity and make it suitable for multiple target tracking with a high number of targets. We define a measurement-driven clustering algorithm to reduce the data association problem into several subproblems, and we provide the derivation of the resulting clustered PMBM posterior density via Kullback-Leibler divergence minimisation. Furthermore, we investigate different strategies to reduce the number of single target hypotheses by approximating the posterior via merging and inter-track swapping of Bernoulli components. We evaluate the performance of the proposed algorithm on simulated tracking scenarios with more than one thousand targets.
Diaphragm Ankle Actuation for Efficient Series Elastic Legged Robot Hopping
Mar 04, 2022
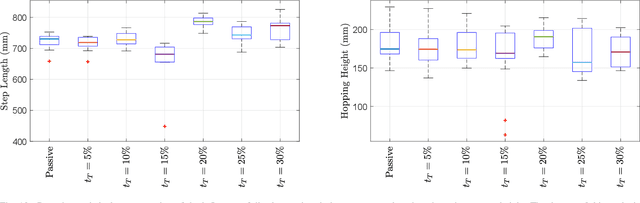


Robots need lightweight legs for agile locomotion, and intrinsic series elastic compliance has proven to be a major ingredient for energy-efficient locomotion and robust locomotion control. Animals' anatomy and locomotion capabilities emphasize the importance of that lightweight legs and integrated, compact, series elastically actuated for distal leg joints. But unlike robots, animals achieve series elastic actuation by their muscle-tendon units. So far no designs are available that feature all characteristics of a perfect distal legged locomotion actuator; a low-weight and low-inertia design, with high mechanical efficiency, no stick and sliding friction, low mechanical complexity, high-power output while being easy to mount. Ideally, such an actuator can be controlled directly and without mechanical cross-coupling, for example remotely. With this goal in mind, we propose a low-friction, lightweight Series ELastic Diaphragm distal Actuator (SELDA) which meets many, although not all, of the above requirements. We develop, implement, and characterize a bioinspired robot leg that features a SELDA-actuated foot segment. We compare two leg configurations controlled by a central pattern generator that both feature agile forward hopping. By tuning SELDA's activation timing, we effectively adjust the robot's hopping height by 11% and its forward velocity by 14%, even with comparatively low power injection to the distal joint.