 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating Batch Inference in a Sequential Monte Carlo Framework for Neural Networks
Jan 29, 2026Bayesian inference allows us to define a posterior distribution over the weights of a generic neural network (NN). Exact posteriors are usually intractable, in which case approximations can be employed. One such approximation - variational inference - is computationally efficient when using mini-batch stochastic gradient descent as subsets of the data are used for likelihood and gradient evaluations, though the approach relies on the selection of a variational distribution which sufficiently matches the form of the posterior. Particle-based methods such as Markov chain Monte Carlo and Sequential Monte Carlo (SMC) do not assume a parametric family for the posterior by typically require higher computational cost. These sampling methods typically use the full-batch of data for likelihood and gradient evaluations, which contributes to this computational expense. We explore several methods of gradually introducing more mini-batches of data (data annealing) into likelihood and gradient evaluations of an SMC sampler. We find that we can achieve up to $6\times$ faster training with minimal loss in accuracy on benchmark image classification problems using NNs.
Hess-MC2: Sequential Monte Carlo Squared using Hessian Information and Second Order Proposals
Jul 10, 2025
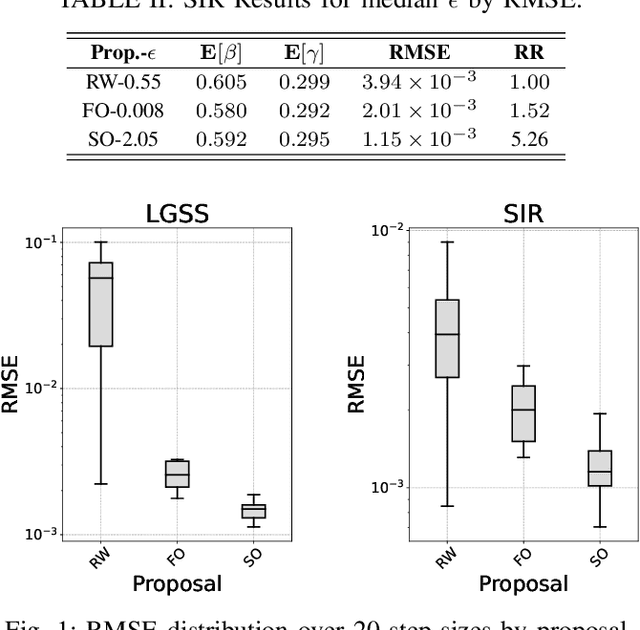
When performing Bayesian inference using Sequential Monte Carlo (SMC) methods, two considerations arise: the accuracy of the posterior approximation and computational efficiency. To address computational demands, Sequential Monte Carlo Squared (SMC$^2$) is well-suited for high-performance computing (HPC) environments. The design of the proposal distribution within SMC$^2$ can improve accuracy and exploration of the posterior as poor proposals may lead to high variance in importance weights and particle degeneracy. The Metropolis-Adjusted Langevin Algorithm (MALA) uses gradient information so that particles preferentially explore regions of higher probability. In this paper, we extend this idea by incorporating second-order information, specifically the Hessian of the log-target. While second-order proposals have been explored previously in particle Markov Chain Monte Carlo (p-MCMC) methods, we are the first to introduce them within the SMC$^2$ framework. Second-order proposals not only use the gradient (first-order derivative), but also the curvature (second-order derivative) of the target distribution. Experimental results on synthetic models highlight the benefits of our approach in terms of step-size selection and posterior approximation accuracy when compared to other proposals.
Humble your Overconfident Networks: Unlearning Overfitting via Sequential Monte Carlo Tempered Deep Ensembles
May 16, 2025Sequential Monte Carlo (SMC) methods offer a principled approach to Bayesian uncertainty quantification but are traditionally limited by the need for full-batch gradient evaluations. We introduce a scalable variant by incorporating Stochastic Gradient Hamiltonian Monte Carlo (SGHMC) proposals into SMC, enabling efficient mini-batch based sampling. Our resulting SMCSGHMC algorithm outperforms standard stochastic gradient descent (SGD) and deep ensembles across image classification, out-of-distribution (OOD) detection, and transfer learning tasks. We further show that SMCSGHMC mitigates overfitting and improves calibration, providing a flexible, scalable pathway for converting pretrained neural networks into well-calibrated Bayesian models.
Efficient MCMC Sampling with Expensive-to-Compute and Irregular Likelihoods
May 15, 2025Bayesian inference with Markov Chain Monte Carlo (MCMC) is challenging when the likelihood function is irregular and expensive to compute. We explore several sampling algorithms that make use of subset evaluations to reduce computational overhead. We adapt the subset samplers for this setting where gradient information is not available or is unreliable. To achieve this, we introduce data-driven proxies in place of Taylor expansions and define a novel computation-cost aware adaptive controller. We undertake an extensive evaluation for a challenging disease modelling task and a configurable task with similar irregularity in the likelihood surface. We find our improved version of Hierarchical Importance with Nested Training Samples (HINTS), with adaptive proposals and a data-driven proxy, obtains the best sampling error in a fixed computational budget. We conclude that subset evaluations can provide cheap and naturally-tempered exploration, while a data-driven proxy can pre-screen proposals successfully in explored regions of the state space. These two elements combine through hierarchical delayed acceptance to achieve efficient, exact sampling.
Utilising Gradient-Based Proposals Within Sequential Monte Carlo Samplers for Training of Partial Bayesian Neural Networks
May 01, 2025Partial Bayesian neural networks (pBNNs) have been shown to perform competitively with fully Bayesian neural networks while only having a subset of the parameters be stochastic. Using sequential Monte Carlo (SMC) samplers as the inference method for pBNNs gives a non-parametric probabilistic estimation of the stochastic parameters, and has shown improved performance over parametric methods. In this paper we introduce a new SMC-based training method for pBNNs by utilising a guided proposal and incorporating gradient-based Markov kernels, which gives us better scalability on high dimensional problems. We show that our new method outperforms the state-of-the-art in terms of predictive performance and optimal loss. We also show that pBNNs scale well with larger batch sizes, resulting in significantly reduced training times and often better performance.
Poisson multi-Bernoulli mixture filter for trajectory measurements
Apr 11, 2025This paper presents a Poisson multi-Bernoulli mixture (PMBM) filter for multi-target filtering based on sensor measurements that are sets of trajectories in the last two-time step window. The proposed filter, the trajectory measurement PMBM (TM-PMBM) filter, propagates a PMBM density on the set of target states. In prediction, the filter obtains the PMBM density on the set of trajectories over the last two time steps. This density is then updated with the set of trajectory measurements. After the update step, the PMBM posterior on the set of two-step trajectories is marginalised to obtain a PMBM density on the set of target states. The filter provides a closed-form solution for multi-target filtering based on sets of trajectory measurements, estimating the set of target states at the end of each time window. Additionally, the paper proposes computationally lighter alternatives to the TM-PMBM filter by deriving a Poisson multi-Bernoulli (PMB) density through Kullback-Leibler divergence minimisation in an augmented space with auxiliary variables. The performance of the proposed filters are evaluated in a simulation study.
Incorporating the ChEES Criterion into Sequential Monte Carlo Samplers
Apr 03, 2025



Markov chain Monte Carlo (MCMC) methods are a powerful but computationally expensive way of performing non-parametric Bayesian inference. MCMC proposals which utilise gradients, such as Hamiltonian Monte Carlo (HMC), can better explore the parameter space of interest if the additional hyper-parameters are chosen well. The No-U-Turn Sampler (NUTS) is a variant of HMC which is extremely effective at selecting these hyper-parameters but is slow to run and is not suited to GPU architectures. An alternative to NUTS, Change in the Estimator of the Expected Square HMC (ChEES-HMC) was shown not only to run faster than NUTS on GPU but also sample from posteriors more efficiently. Sequential Monte Carlo (SMC) samplers are another sampling method which instead output weighted samples from the posterior. They are very amenable to parallelisation and therefore being run on GPUs while having additional flexibility in their choice of proposal over MCMC. We incorporate (ChEEs-HMC) as a proposal into SMC samplers and demonstrate competitive but faster performance than NUTS on a number of tasks.
An Entropic Metric for Measuring Calibration of Machine Learning Models
Feb 20, 2025Understanding the confidence with which a machine learning model classifies an input datum is an important, and perhaps under-investigated, concept. In this paper, we propose a new calibration metric, the Entropic Calibration Difference (ECD). Based on existing research in the field of state estimation, specifically target tracking (TT), we show how ECD may be applied to binary classification machine learning models. We describe the relative importance of under- and over-confidence and how they are not conflated in the TT literature. Indeed, our metric distinguishes under- from over-confidence. We consider this important given that algorithms that are under-confident are likely to be 'safer' than algorithms that are over-confident, albeit at the expense of also being over-cautious and so statistically inefficient. We demonstrate how this new metric performs on real and simulated data and compare with other metrics for machine learning model probability calibration, including the Expected Calibration Error (ECE) and its signed counterpart, the Expected Signed Calibration Error (ESCE).
Fully Bayesian Wideband Direction-of-Arrival Estimation and Detection via RJMCMC
Dec 12, 2024



We propose a fully Bayesian approach to wideband, or broadband, direction-of-arrival (DoA) estimation and signal detection. Unlike previous works in wideband DoA estimation and detection, where the signals were modeled in the time-frequency domain, we directly model the time-domain representation and treat the non-causal part of the source signal as latent variables. Furthermore, our Bayesian model allows for closed-form marginalization of the latent source signals by leveraging conjugacy. To further speed up computation, we exploit the sparse ``stripe matrix structure'' of the considered system, which stems from the circulant matrix representation of linear time-invariant (LTI) systems. This drastically reduces the time complexity of computing the likelihood from $\mathcal{O}(N^3 k^3)$ to $\mathcal{O}(N k^3)$, where $N$ is the number of samples received by the array and $k$ is the number of sources. These computational improvements allow for efficient posterior inference through reversible jump Markov chain Monte Carlo (RJMCMC). We use the non-reversible extension of RJMCMC (NRJMCMC), which often achieves lower autocorrelation and faster convergence than the conventional reversible variant. Detection, estimation, and reconstruction of the latent source signals can then all be performed in a fully Bayesian manner through the samples drawn using NRJMCMC. We evaluate the detection performance of the procedure by comparing against generalized likelihood ratio testing (GLRT) and information criteria.
Enhanced SMC$^2$: Leveraging Gradient Information from Differentiable Particle Filters Within Langevin Proposals
Jul 24, 2024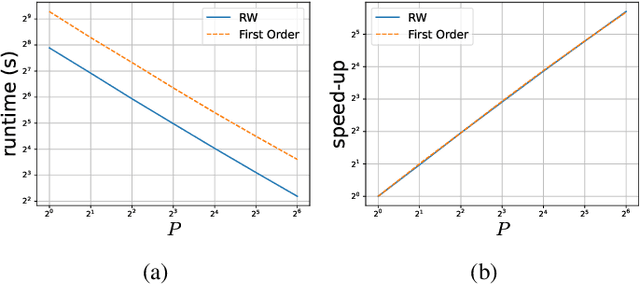
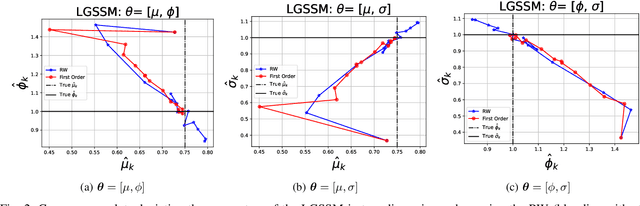
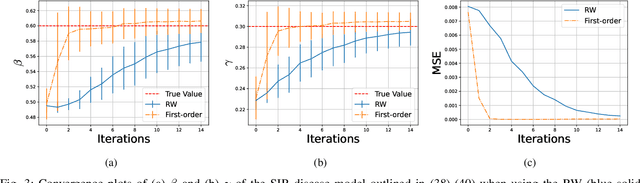
Sequential Monte Carlo Squared (SMC$^2$) is a Bayesian method which can infer the states and parameters of non-linear, non-Gaussian state-space models. The standard random-walk proposal in SMC$^2$ faces challenges, particularly with high-dimensional parameter spaces. This study outlines a novel approach by harnessing first-order gradients derived from a Common Random Numbers - Particle Filter (CRN-PF) using PyTorch. The resulting gradients can be leveraged within a Langevin proposal without accept/reject. Including Langevin dynamics within the proposal can result in a higher effective sample size and more accurate parameter estimates when compared with the random-walk. The resulting algorithm is parallelized on distributed memory using Message Passing Interface (MPI) and runs in $\mathcal{O}(\log_2N)$ time complexity. Utilizing 64 computational cores we obtain a 51x speed-up when compared to a single core. A GitHub link is given which provides access to the code.