 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFully Bayesian Wideband Direction-of-Arrival Estimation and Detection via RJMCMC
Dec 12, 2024



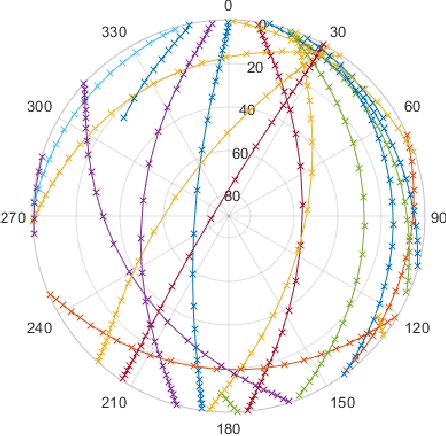
We propose a fully Bayesian approach to wideband, or broadband, direction-of-arrival (DoA) estimation and signal detection. Unlike previous works in wideband DoA estimation and detection, where the signals were modeled in the time-frequency domain, we directly model the time-domain representation and treat the non-causal part of the source signal as latent variables. Furthermore, our Bayesian model allows for closed-form marginalization of the latent source signals by leveraging conjugacy. To further speed up computation, we exploit the sparse ``stripe matrix structure'' of the considered system, which stems from the circulant matrix representation of linear time-invariant (LTI) systems. This drastically reduces the time complexity of computing the likelihood from $\mathcal{O}(N^3 k^3)$ to $\mathcal{O}(N k^3)$, where $N$ is the number of samples received by the array and $k$ is the number of sources. These computational improvements allow for efficient posterior inference through reversible jump Markov chain Monte Carlo (RJMCMC). We use the non-reversible extension of RJMCMC (NRJMCMC), which often achieves lower autocorrelation and faster convergence than the conventional reversible variant. Detection, estimation, and reconstruction of the latent source signals can then all be performed in a fully Bayesian manner through the samples drawn using NRJMCMC. We evaluate the detection performance of the procedure by comparing against generalized likelihood ratio testing (GLRT) and information criteria.
Adaptive Bayesian Beamforming for Imaging by Marginalizing the Speed of Sound
Dec 08, 2022



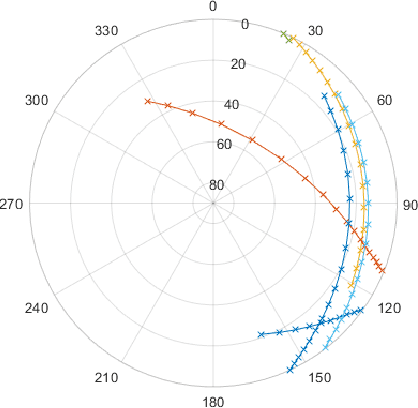
Imaging methods based on array signal processing often require a fixed propagation speed of the medium, or speed of sound (SoS) for methods based on acoustic signals. The resolution of the images formed using these methods is strongly affected by the assumed SoS, which, due to multipath, nonlinear propagation, and non-uniform mediums, is challenging at best to select. In this letter, we propose a Bayesian approach to marginalize the influence of the SoS on beamformers for imaging. We adapt Bayesian direction-of-arrival estimation to an imaging setting and integrate a popular minimum variance beamformer over the posterior of the SoS. To solve the Bayesian integral efficiently, we use numerical Gauss quadrature. We apply our beamforming approach to shallow water sonar imaging where multipath and nonlinear propagation is abundant. We compare against the minimum variance distortionless response (MVDR) beamformer and demonstrate that its Bayesian counterpart achieves improved range and azimuthal resolution while effectively suppressing multipath artifacts.
Double Deep Q Networks for Sensor Management in Space Situational Awareness
May 27, 2022
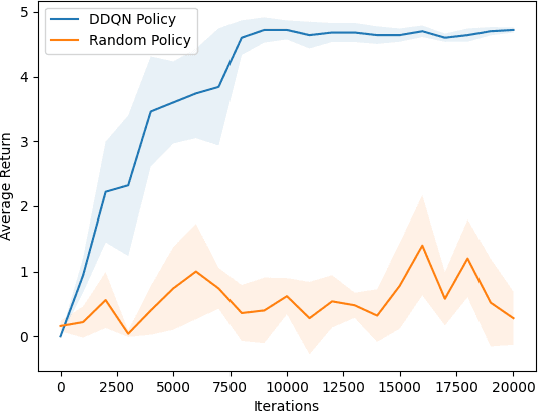
We present a novel Double Deep Q Network (DDQN) application to a sensor management problem in space situational awareness (SSA). Frequent launches of satellites into Earth orbit pose a significant sensor management challenge, whereby a limited number of sensors are required to detect and track an increasing number of objects. In this paper, we demonstrate the use of reinforcement learning to develop a sensor management policy for SSA. We simulate a controllable Earth-based telescope, which is trained to maximise the number of satellites tracked using an extended Kalman filter. The estimated state covariance matrices for satellites observed under the DDQN policy are greatly reduced compared to those generated by an alternate (random) policy. This work provides the basis for further advancements and motivates the use of reinforcement learning for SSA.
A System for the Generation of Synthetic Wide Area Aerial Surveillance Imagery
Mar 13, 2018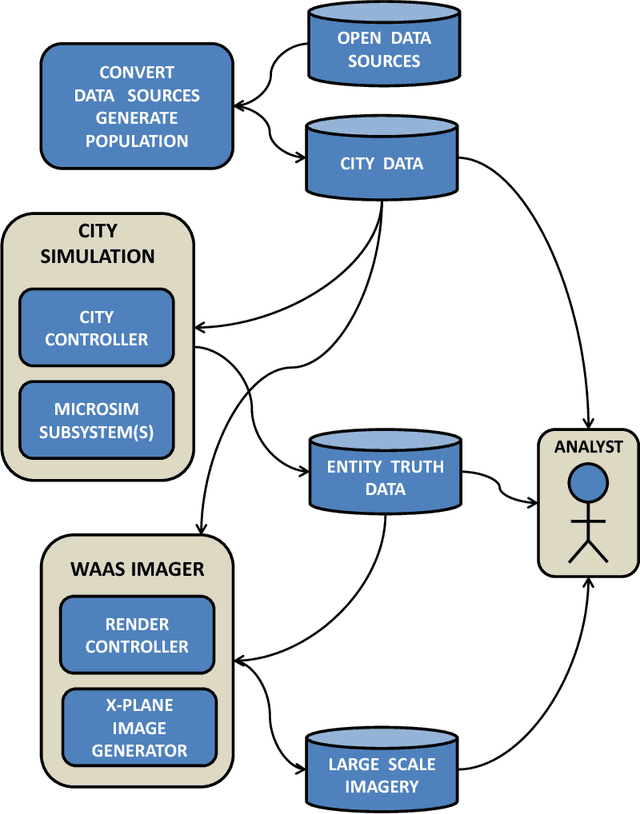
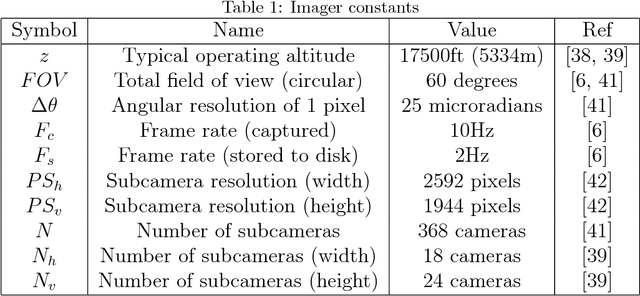
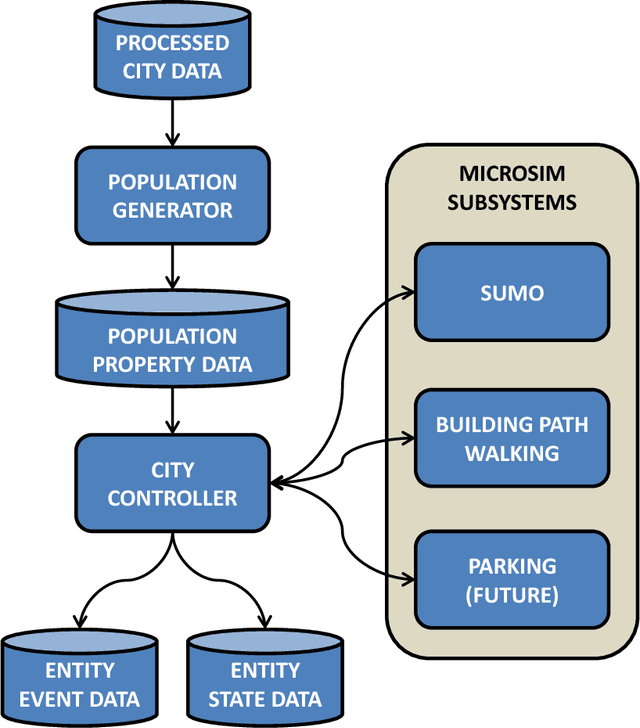
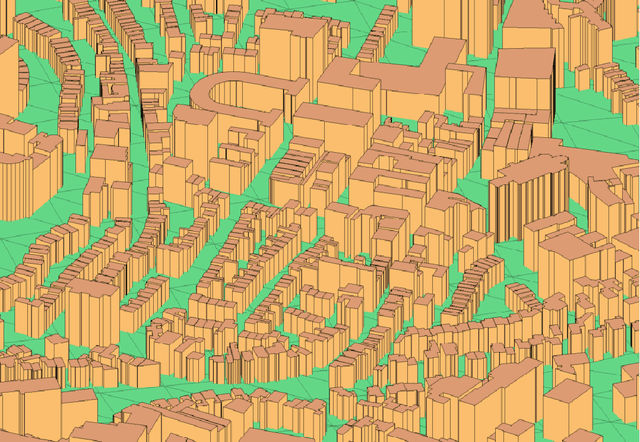
The development, benchmarking and validation of aerial Persistent Surveillance (PS) algorithms requires access to specialist Wide Area Aerial Surveillance (WAAS) datasets. Such datasets are difficult to obtain and are often extremely large both in spatial resolution and temporal duration. This paper outlines an approach to the simulation of complex urban environments and demonstrates the viability of using this approach for the generation of simulated sensor data, corresponding to the use of wide area imaging systems for surveillance and reconnaissance applications. This provides a cost-effective method to generate datasets for vehicle tracking algorithms and anomaly detection methods. The system fuses the Simulation of Urban Mobility (SUMO) traffic simulator with a MATLAB controller and an image generator to create scenes containing uninterrupted door-to-door journeys across large areas of the urban environment. This `pattern-of-life' approach provides three-dimensional visual information with natural movement and traffic flows. This can then be used to provide simulated sensor measurements (e.g. visual band and infrared video imagery) and automatic access to ground-truth data for the evaluation of multi-target tracking systems.