 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerception of Emotions in Human and Robot Faces: Is the Eye Region Enough?
Oct 18, 2024The increased interest in developing next-gen social robots has raised questions about the factors affecting the perception of robot emotions. This study investigates the impact of robot appearances (humanlike, mechanical) and face regions (full-face, eye-region) on human perception of robot emotions. A between-subjects user study (N = 305) was conducted where participants were asked to identify the emotions being displayed in videos of robot faces, as well as a human baseline. Our findings reveal three important insights for effective social robot face design in Human-Robot Interaction (HRI): Firstly, robots equipped with a back-projected, fully animated face - regardless of whether they are more human-like or more mechanical-looking - demonstrate a capacity for emotional expression comparable to that of humans. Secondly, the recognition accuracy of emotional expressions in both humans and robots declines when only the eye region is visible. Lastly, within the constraint of only the eye region being visible, robots with more human-like features significantly enhance emotion recognition.
HRI in Indian Education: Challenges Opportunities
Mar 18, 2024With the recent advancements in the field of robotics and the increased focus on having general-purpose robots widely available to the general public, it has become increasingly necessary to pursue research into Human-robot interaction (HRI). While there have been a lot of works discussing frameworks for teaching HRI in educational institutions with a few institutions already offering courses to students, a consensus on the course content still eludes the field. In this work, we highlight a few challenges and opportunities while designing an HRI course from an Indian perspective. These topics warrant further deliberations as they have a direct impact on the design of HRI courses and wider implications for the entire field.
Knowing Where to Look: A Planning-based Architecture to Automate the Gaze Behavior of Social Robots
Oct 06, 2022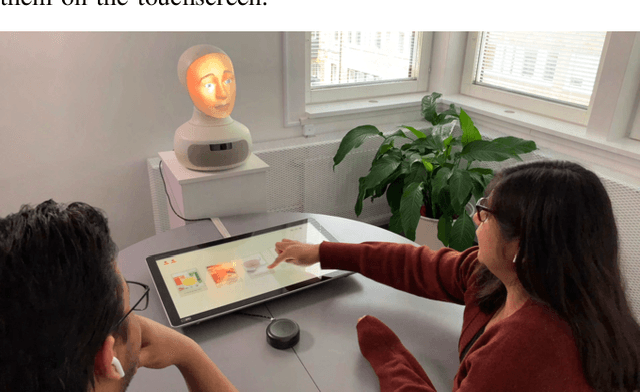
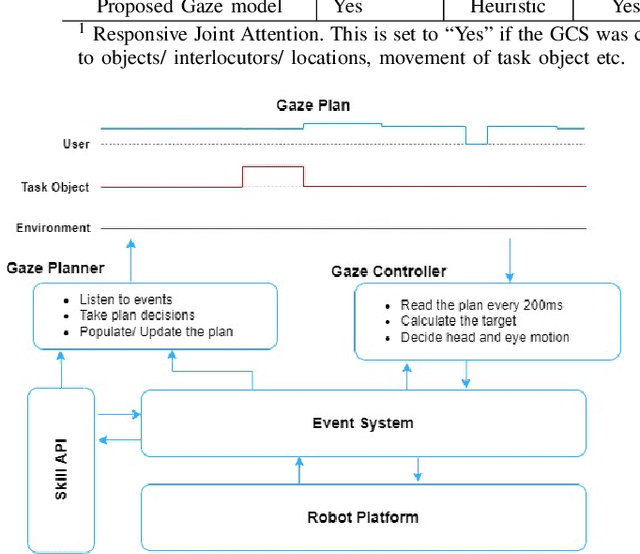
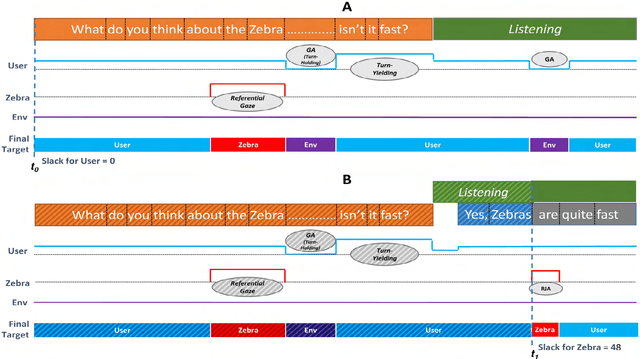
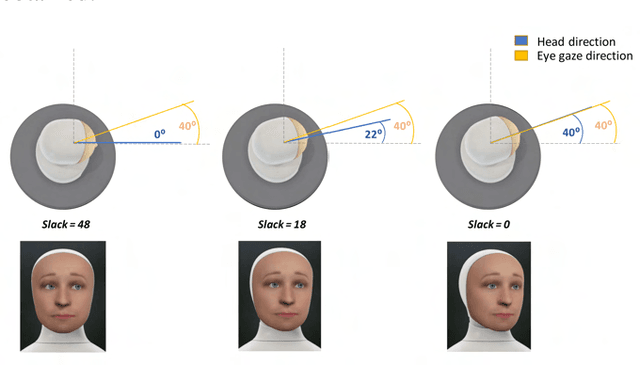
Gaze cues play an important role in human communication and are used to coordinate turn-taking and joint attention, as well as to regulate intimacy. In order to have fluent conversations with people, social robots need to exhibit human-like gaze behavior. Previous Gaze Control Systems (GCS) in HRI have automated robot gaze using data-driven or heuristic approaches. However, these systems tend to be mainly reactive in nature. Planning the robot gaze ahead of time could help in achieving more realistic gaze behavior and better eye-head coordination. In this paper, we propose and implement a novel planning-based GCS. We evaluate our system in a comparative within-subjects user study (N=26) between a reactive system and our proposed system. The results show that the users preferred the proposed system and that it was significantly more interpretable and better at regulating intimacy.
Real-time Emotion Appraisal with Circumplex Model for Human-Robot Interaction
Feb 20, 2022
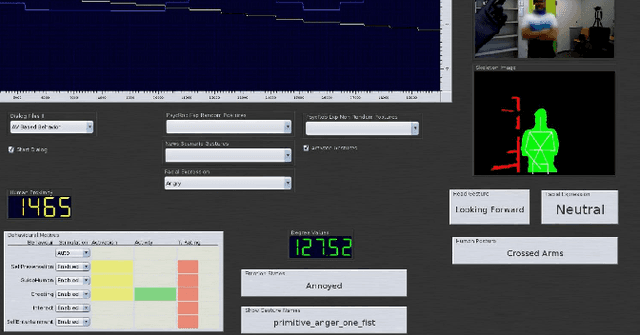
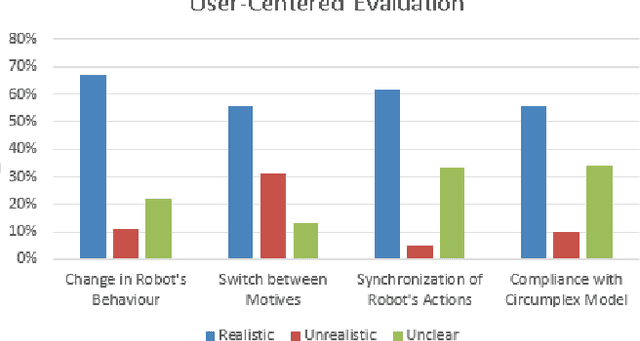
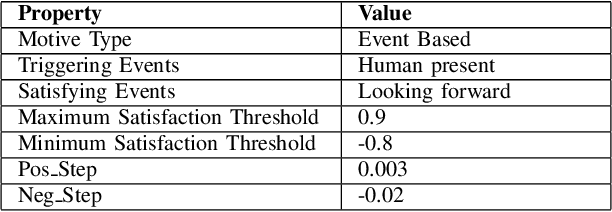
Emotions are the intrinsic or extrinsic representations of our experiences. The importance of emotions during a human-human interaction is immense as it formulates the basis of our interaction framework. There are several approaches in psychology to evaluate emotional states in humans based on the perceived stimuli. However, the topic has been less explored as far as human-robot interaction is concerned. This paper uses an appropriate emotion appraisal mechanism from psychology, generating an emotional state in a humanoid robot on-the-fly during human-robot interaction. Since the exhibition of only six basic emotions is not sufficient to cater to diverse situations, the use of the Circumplex Model in this work has allowed the life-sized robot called ROBIN to experience 28 emotional states in different interaction scenarios. Realistic robot behaviour has been generated based on the proposed appraisal system in various interaction scenarios.
A System for Automated Open-Source Threat Intelligence Gathering and Management
Jan 19, 2021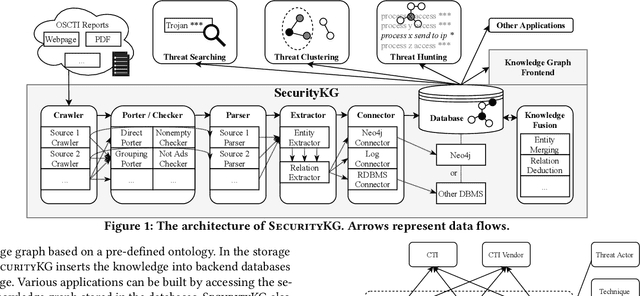
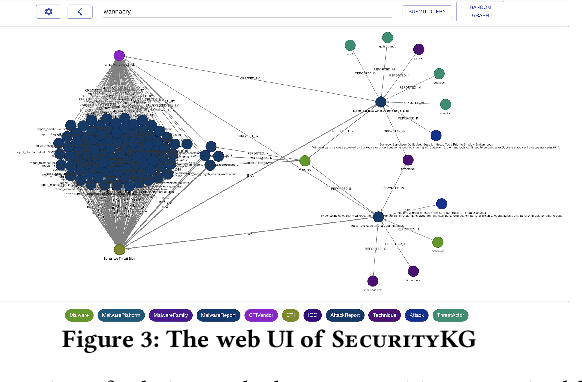
Sophisticated cyber attacks have plagued many high-profile businesses. To remain aware of the fast-evolving threat landscape, open-source Cyber Threat Intelligence (OSCTI) has received growing attention from the community. Commonly, knowledge about threats is presented in a vast number of OSCTI reports. Despite the pressing need for high-quality OSCTI, existing OSCTI gathering and management platforms, however, have primarily focused on isolated, low-level Indicators of Compromise. On the other hand, higher-level concepts (e.g., adversary tactics, techniques, and procedures) and their relationships have been overlooked, which contain essential knowledge about threat behaviors that is critical to uncovering the complete threat scenario. To bridge the gap, we propose SecurityKG, a system for automated OSCTI gathering and management. SecurityKG collects OSCTI reports from various sources, uses a combination of AI and NLP techniques to extract high-fidelity knowledge about threat behaviors, and constructs a security knowledge graph. SecurityKG also provides a UI that supports various types of interactivity to facilitate knowledge graph exploration.
A System for the Generation of Synthetic Wide Area Aerial Surveillance Imagery
Mar 13, 2018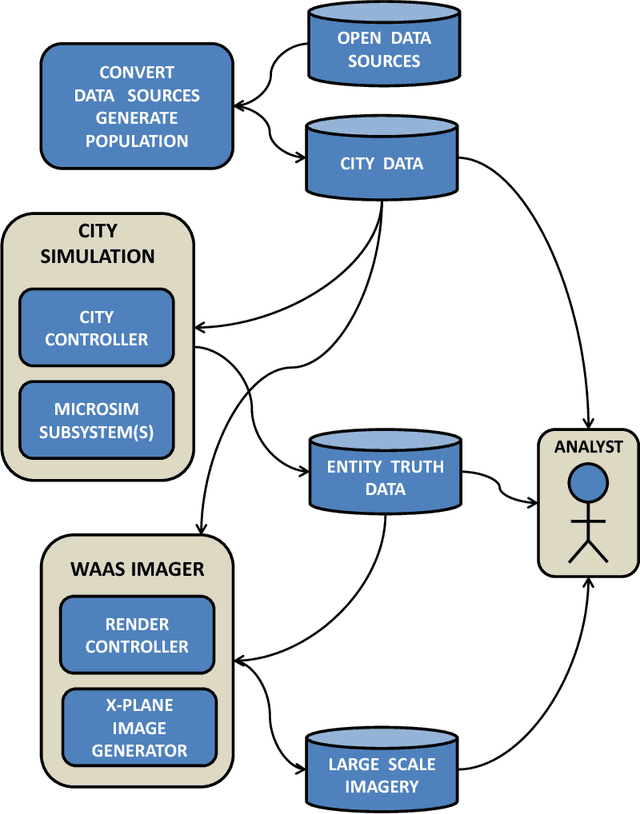
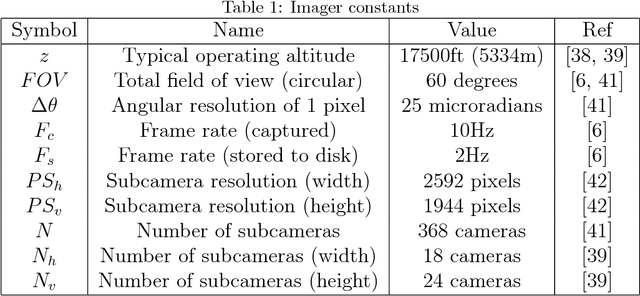
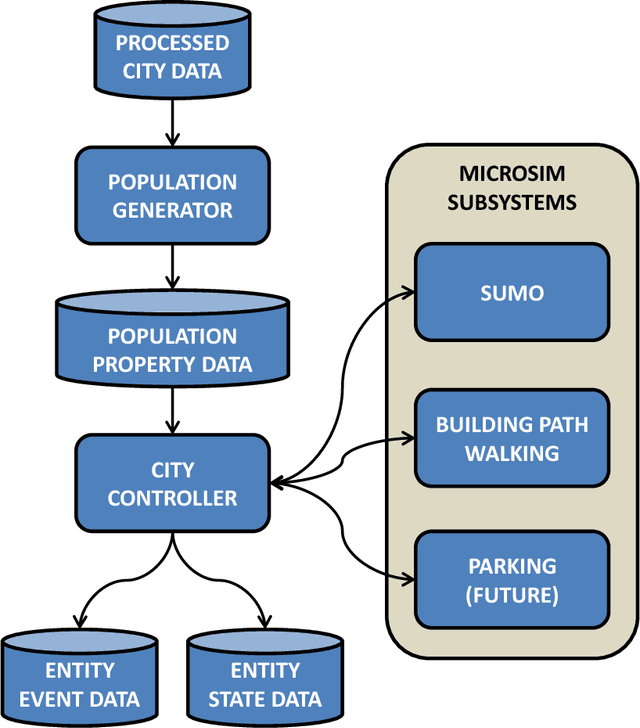
The development, benchmarking and validation of aerial Persistent Surveillance (PS) algorithms requires access to specialist Wide Area Aerial Surveillance (WAAS) datasets. Such datasets are difficult to obtain and are often extremely large both in spatial resolution and temporal duration. This paper outlines an approach to the simulation of complex urban environments and demonstrates the viability of using this approach for the generation of simulated sensor data, corresponding to the use of wide area imaging systems for surveillance and reconnaissance applications. This provides a cost-effective method to generate datasets for vehicle tracking algorithms and anomaly detection methods. The system fuses the Simulation of Urban Mobility (SUMO) traffic simulator with a MATLAB controller and an image generator to create scenes containing uninterrupted door-to-door journeys across large areas of the urban environment. This `pattern-of-life' approach provides three-dimensional visual information with natural movement and traffic flows. This can then be used to provide simulated sensor measurements (e.g. visual band and infrared video imagery) and automatic access to ground-truth data for the evaluation of multi-target tracking systems.