 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bayesian Filtering Approach for Learning Lagrangian Dynamics from Noisy Measurements
Jun 30, 2026This paper proposes a Bayesian filtering-based approach for learning the dynamics of a physical system from partial, noisy measurements. We model the system dynamics using a Lagrangian mechanics formulation. As in Lagrangian neural networks (LNNs), we parameterize the kinetic and potential energies with neural networks. The unknown external forces in the Lagrangian formulation are modeled as white Gaussian noise. The corresponding Euler--Lagrange equations then yield a continuous-time stochastic state-space model (SSM) that describes the system dynamics. The neural network parameters and system states are then jointly learned via a maximum-likelihood method using Gaussian-approximation-based Bayesian filters. The effectiveness of the proposed method is demonstrated on pendulum and Duffing oscillator examples, and its performance is compared with conventional LNNs and with approximate Bayesian filters using known system models.
Integrating Lagrangian Neural Networks into the Dyna Framework for Reinforcement Learning
Mar 09, 2026Model-based reinforcement learning (MBRL) is sample-efficient but depends on the accuracy of the learned dynamics, which are often modeled using black-box methods that do not adhere to physical laws. Those methods tend to produce inaccurate predictions when presented with data that differ from the original training set. In this work, we employ Lagrangian neural networks (LNNs), which enforce an underlying Lagrangian structure to train the model within a Dyna-based MBRL framework. Furthermore, we train the LNN using stochastic gradient-based and state-estimation-based optimizers to learn the network's weights. The state-estimation-based method converges faster than the stochastic gradient-based method during neural network training. Simulation results are provided to illustrate the effectiveness of the proposed LNN-based Dyna framework for MBRL.
Dual-Level Models for Physics-Informed Multi-Step Time Series Forecasting
Jan 12, 2026This paper develops an approach for multi-step forecasting of dynamical systems by integrating probabilistic input forecasting with physics-informed output prediction. Accurate multi-step forecasting of time series systems is important for the automatic control and optimization of physical processes, enabling more precise decision-making. While mechanistic-based and data-driven machine learning (ML) approaches have been employed for time series forecasting, they face significant limitations. Incomplete knowledge of process mathematical models limits mechanistic-based direct employment, while purely data-driven ML models struggle with dynamic environments, leading to poor generalization. To address these limitations, this paper proposes a dual-level strategy for physics-informed forecasting of dynamical systems. On the first level, input variables are forecast using a hybrid method that integrates a long short-term memory (LSTM) network into probabilistic state transition models (STMs). On the second level, these stochastically predicted inputs are sequentially fed into a physics-informed neural network (PINN) to generate multi-step output predictions. The experimental results of the paper demonstrate that the hybrid input forecasting models achieve a higher log-likelihood and lower mean squared errors (MSE) compared to conventional STMs. Furthermore, the PINNs driven by the input forecasting models outperform their purely data-driven counterparts in terms of MSE and log-likelihood, exhibiting stronger generalization and forecasting performance across multiple test cases.
Temporal parallelisation of continuous-time maximum-a-posteriori trajectory estimation
Dec 15, 2025This paper proposes a parallel-in-time method for computing continuous-time maximum-a-posteriori (MAP) trajectory estimates of the states of partially observed stochastic differential equations (SDEs), with the goal of improving computational speed on parallel architectures. The MAP estimation problem is reformulated as a continuous-time optimal control problem based on the Onsager-Machlup functional. This reformulation enables the use of a previously proposed parallel-in-time solution for optimal control problems, which we adapt to the current problem. The structure of the resulting optimal control problem admits a parallel solution based on parallel associative scan algorithms. In the linear Gaussian special case, it yields a parallel Kalman-Bucy filter and a parallel continuous-time Rauch-Tung-Striebel smoother. These linear computational methods are further extended to nonlinear continuous-time state-space models through Taylor expansions. We also present the corresponding parallel two-filter smoother. The graphics processing unit (GPU) experiments on linear and nonlinear models demonstrate that the proposed framework achieves a significant speedup in computations while maintaining the accuracy of sequential algorithms.
Proximal Approximate Inference in State-Space Models
Nov 19, 2025We present a class of algorithms for state estimation in nonlinear, non-Gaussian state-space models. Our approach is based on a variational Lagrangian formulation that casts Bayesian inference as a sequence of entropic trust-region updates subject to dynamic constraints. This framework gives rise to a family of forward-backward algorithms, whose structure is determined by the chosen factorization of the variational posterior. By focusing on Gauss--Markov approximations, we derive recursive schemes with favorable computational complexity. For general nonlinear, non-Gaussian models we close the recursions using generalized statistical linear regression and Fourier--Hermite moment matching.
Online Bayesian Experimental Design for Partially Observed Dynamical Systems
Nov 06, 2025
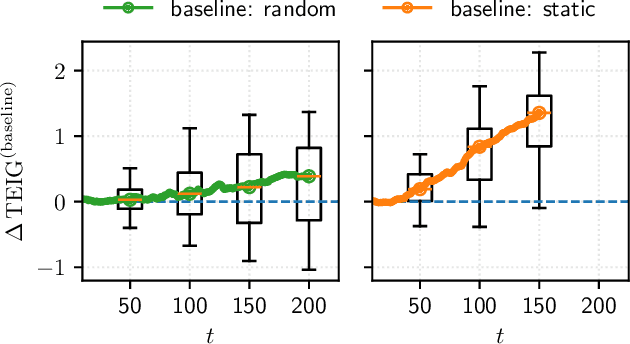
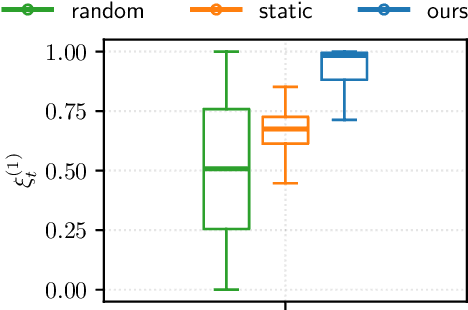
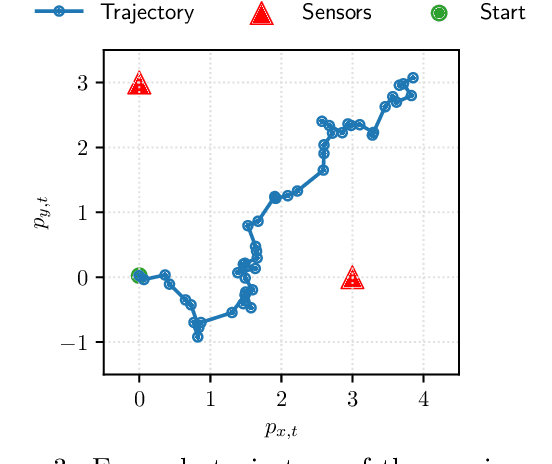
Bayesian experimental design (BED) provides a principled framework for optimizing data collection, but existing approaches do not apply to crucial real-world settings such as dynamical systems with partial observability, where only noisy and incomplete observations are available. These systems are naturally modeled as state-space models (SSMs), where latent states mediate the link between parameters and data, making the likelihood -- and thus information-theoretic objectives like the expected information gain (EIG) -- intractable. In addition, the dynamical nature of the system requires online algorithms that update posterior distributions and select designs sequentially in a computationally efficient manner. We address these challenges by deriving new estimators of the EIG and its gradient that explicitly marginalize latent states, enabling scalable stochastic optimization in nonlinear SSMs. Our approach leverages nested particle filters (NPFs) for efficient online inference with convergence guarantees. Applications to realistic models, such as the susceptible-infected-recovered (SIR) and a moving source location task, show that our framework successfully handles both partial observability and online computation.
Ultrafast Deep Learning-Based Scatter Estimation in Cone-Beam Computed Tomography
Sep 10, 2025Purpose: Scatter artifacts drastically degrade the image quality of cone-beam computed tomography (CBCT) scans. Although deep learning-based methods show promise in estimating scatter from CBCT measurements, their deployment in mobile CBCT systems or edge devices is still limited due to the large memory footprint of the networks. This study addresses the issue by applying networks at varying resolutions and suggesting an optimal one, based on speed and accuracy. Methods: First, the reconstruction error in down-up sampling of CBCT scatter signal was examined at six resolutions by comparing four interpolation methods. Next, a recent state-of-the-art method was trained across five image resolutions and evaluated for the reductions in floating-point operations (FLOPs), inference times, and GPU memory requirements. Results: Reducing the input size and network parameters achieved a 78-fold reduction in FLOPs compared to the baseline method, while maintaining comarable performance in terms of mean-absolute-percentage-error (MAPE) and mean-square-error (MSE). Specifically, the MAPE decreased to 3.85% compared to 4.42%, and the MSE decreased to 1.34 \times 10^{-2} compared to 2.01 \times 10^{-2}. Inference time and GPU memory usage were reduced by factors of 16 and 12, respectively. Further experiments comparing scatter-corrected reconstructions on a large, simulated dataset and real CBCT scans from water and Sedentex CT phantoms clearly demonstrated the robustness of our method. Conclusion: This study highlights the underappreciated role of downsampling in deep learning-based scatter estimation. The substantial reduction in FLOPs and GPU memory requirements achieved by our method enables scatter correction in resource-constrained environments, such as mobile CBCT and edge devices.
Conditional Normalizing Flow Surrogate for Monte Carlo Prediction of Radiative Properties in Nanoparticle-Embedded Layers
Aug 27, 2025We present a probabilistic, data-driven surrogate model for predicting the radiative properties of nanoparticle embedded scattering media. The model uses conditional normalizing flows, which learn the conditional distribution of optical outputs, including reflectance, absorbance, and transmittance, given input parameters such as the absorption coefficient, scattering coefficient, anisotropy factor, and particle size distribution. We generate training data using Monte Carlo radiative transfer simulations, with optical properties derived from Mie theory. Unlike conventional neural networks, the conditional normalizing flow model yields full posterior predictive distributions, enabling both accurate forecasts and principled uncertainty quantification. Our results demonstrate that this model achieves high predictive accuracy and reliable uncertainty estimates, establishing it as a powerful and efficient surrogate for radiative transfer simulations.
* Version of record (publishers PDF) from META 2025 (CC BY). Please cite the proceedings
Sequential Monte Carlo for Policy Optimization in Continuous POMDPs
May 22, 2025



Optimal decision-making under partial observability requires agents to balance reducing uncertainty (exploration) against pursuing immediate objectives (exploitation). In this paper, we introduce a novel policy optimization framework for continuous partially observable Markov decision processes (POMDPs) that explicitly addresses this challenge. Our method casts policy learning as probabilistic inference in a non-Markovian Feynman--Kac model that inherently captures the value of information gathering by anticipating future observations, without requiring extrinsic exploration bonuses or handcrafted heuristics. To optimize policies under this model, we develop a nested sequential Monte Carlo~(SMC) algorithm that efficiently estimates a history-dependent policy gradient under samples from the optimal trajectory distribution induced by the POMDP. We demonstrate the effectiveness of our algorithm across standard continuous POMDP benchmarks, where existing methods struggle to act under uncertainty.
Statistical Linear Regression Approach to Kalman Filtering and Smoothing under Cyber-Attacks
Apr 11, 2025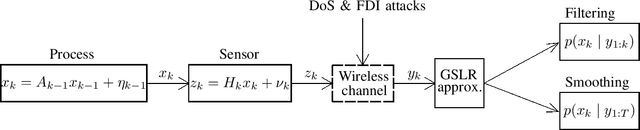
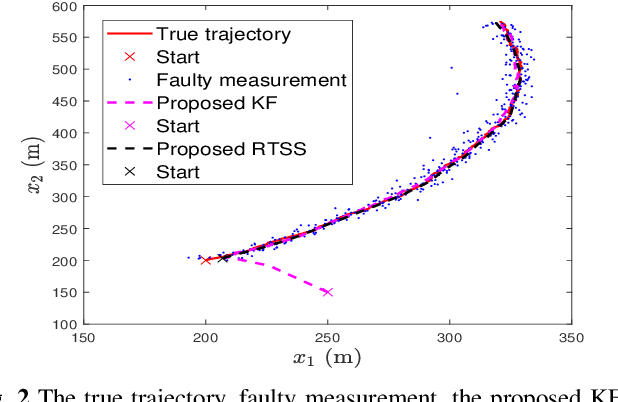
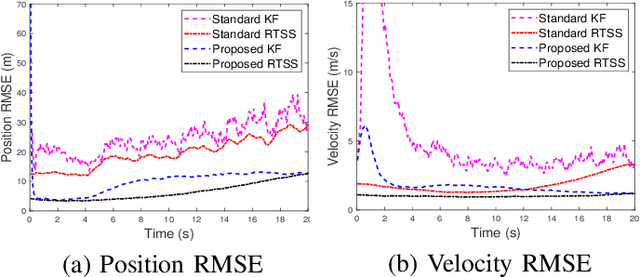
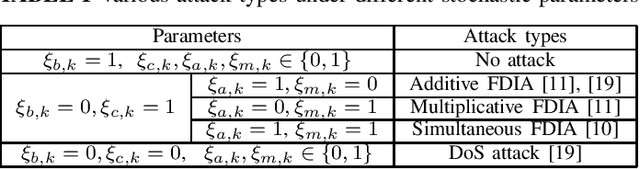
Remote state estimation in cyber-physical systems is often vulnerable to cyber-attacks due to wireless connections between sensors and computing units. In such scenarios, adversaries compromise the system by injecting false data or blocking measurement transmissions via denial-of-service attacks, distorting sensor readings. This paper develops a Kalman filter and Rauch--Tung--Striebel (RTS) smoother for linear stochastic state-space models subject to cyber-attacked measurements. We approximate the faulty measurement model via generalized statistical linear regression (GSLR). The GSLR-based approximated measurement model is then used to develop a Kalman filter and RTS smoother for the problem. The effectiveness of the proposed algorithms under cyber-attacks is demonstrated through a simulated aircraft tracking experiment.