 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaximin Robust Bayesian Experimental Design
Mar 14, 2026We address the brittleness of Bayesian experimental design under model misspecification by formulating the problem as a max--min game between the experimenter and an adversarial nature subject to information-theoretic constraints. We demonstrate that this approach yields a robust objective governed by Sibson's $α$-mutual information~(MI), which identifies the $α$-tilted posterior as the robust belief update and establishes the Rényi divergence as the appropriate measure of conditional information gain. To mitigate the bias and variance of nested Monte Carlo estimators needed to estimate Sibson's $α$-MI, we adopt a PAC-Bayes framework to search over stochastic design policies, yielding rigorous high-probability lower bounds on the robust expected information gain that explicitly control finite-sample error.
Robust Automatic Differentiation of Square-Root Kalman Filters via Gramian Differentials
Mar 13, 2026Square-root Kalman filters propagate state covariances in Cholesky-factor form for numerical stability, and are a natural target for gradient-based parameter learning in state-space models. Their core operation, triangularization of a matrix $M \in \mathbb{R}^{n \times m}$, is computed via a QR decomposition in practice, but naively differentiating through it causes two problems: the semi-orthogonal factor is non-unique when $m > n$, yielding undefined gradients; and the standard Jacobian formula involves inverses, which diverges when $M$ is rank-deficient. Both are resolved by the observation that all filter outputs relevant to learning depend on the input matrix only through the Gramian $MM^\top$, so the composite loss is smooth in $M$ even where the triangularization is not. We derive a closed-form chain-rule directly from the differential of this Gramian identity, prove it exact for the Kalman log-marginal likelihood and filtered moments, and extend it to rank-deficient inputs via a two-component decomposition: a column-space term based on the Moore--Penrose pseudoinverse, and a null-space correction for perturbations outside the column space of $M$.
Particle Gibbs without the Gibbs bit
May 08, 2025Exact parameter and trajectory inference in state-space models is typically achieved by one of two methods: particle marginal Metropolis-Hastings (PMMH) or particle Gibbs (PGibbs). PMMH is a pseudo-marginal algorithm which jointly proposes a new trajectory and parameter, and accepts or rejects both at once. PGibbs instead alternates between sampling from the trajectory, using an algorithm known as conditional sequential Monte Carlo (CSMC) and the parameter in a Hastings-within-Gibbs fashion. While particle independent Metropolis Hastings (PIMH), the parameter-free version of PMMH, is known to be statistically worse than CSMC, PGibbs can induce a slow mixing if the parameter and the state trajectory are very correlated. This has made PMMH the method of choice for many practitioners, despite theory and experiments favouring CSMC over PIMH for the parameter-free problem. In this article, we describe a formulation of PGibbs which bypasses the Gibbs step, essentially marginalizing over the trajectory distribution in a fashion similar to PMMH. This is achieved by considering the implementation of a CSMC algortihm for the state-space model integrated over the joint distribution of the current parameter and the parameter proposal. We illustrate the benefits of method on a simple example known to be challenging for PMMH.
Recursive Nested Filtering for Efficient Amortized Bayesian Experimental Design
Sep 09, 2024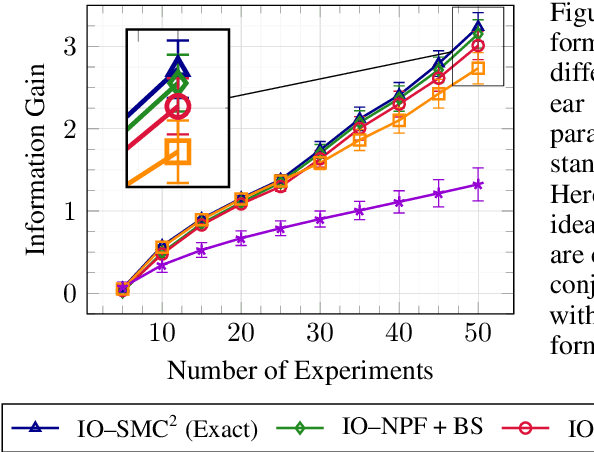
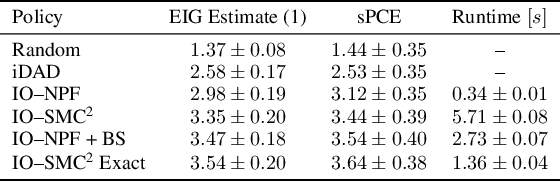
This paper introduces the Inside-Out Nested Particle Filter (IO-NPF), a novel, fully recursive, algorithm for amortized sequential Bayesian experimental design in the non-exchangeable setting. We frame policy optimization as maximum likelihood estimation in a non-Markovian state-space model, achieving (at most) $\mathcal{O}(T^2)$ computational complexity in the number of experiments. We provide theoretical convergence guarantees and introduce a backward sampling algorithm to reduce trajectory degeneracy. IO-NPF offers a practical, extensible, and provably consistent approach to sequential Bayesian experimental design, demonstrating improved efficiency over existing methods.
Conditioning diffusion models by explicit forward-backward bridging
May 22, 2024



Given an unconditional diffusion model $\pi(x, y)$, using it to perform conditional simulation $\pi(x \mid y)$ is still largely an open question and is typically achieved by learning conditional drifts to the denoising SDE after the fact. In this work, we express conditional simulation as an inference problem on an augmented space corresponding to a partial SDE bridge. This perspective allows us to implement efficient and principled particle Gibbs and pseudo-marginal samplers marginally targeting the conditional distribution $\pi(x \mid y)$. Contrary to existing methodology, our methods do not introduce any additional approximation to the unconditional diffusion model aside from the Monte Carlo error. We showcase the benefits and drawbacks of our approach on a series of synthetic and real data examples.
BlackJAX: Composable Bayesian inference in JAX
Feb 22, 2024BlackJAX is a library implementing sampling and variational inference algorithms commonly used in Bayesian computation. It is designed for ease of use, speed, and modularity by taking a functional approach to the algorithms' implementation. BlackJAX is written in Python, using JAX to compile and run NumpPy-like samplers and variational methods on CPUs, GPUs, and TPUs. The library integrates well with probabilistic programming languages by working directly with the (un-normalized) target log density function. BlackJAX is intended as a collection of low-level, composable implementations of basic statistical 'atoms' that can be combined to perform well-defined Bayesian inference, but also provides high-level routines for ease of use. It is designed for users who need cutting-edge methods, researchers who want to create complex sampling methods, and people who want to learn how these work.
Nesting Particle Filters for Experimental Design in Dynamical Systems
Feb 12, 2024In this paper, we propose a novel approach to Bayesian Experimental Design (BED) for non-exchangeable data that formulates it as risk-sensitive policy optimization. We develop the Inside-Out SMC^2 algorithm that uses a nested sequential Monte Carlo (SMC) estimator of the expected information gain and embeds it into a particle Markov chain Monte Carlo (pMCMC) framework to perform gradient-based policy optimization. This is in contrast to recent approaches that rely on biased estimators of the expected information gain (EIG) to amortize the cost of experiments by learning a design policy in advance. Numerical validation on a set of dynamical systems showcases the efficacy of our method in comparison to other state-of-the-art strategies.
Particle-MALA and Particle-mGRAD: Gradient-based MCMC methods for high-dimensional state-space models
Jan 26, 2024State-of-the-art methods for Bayesian inference in state-space models are (a) conditional sequential Monte Carlo (CSMC) algorithms; (b) sophisticated 'classical' MCMC algorithms like MALA, or mGRAD from Titsias and Papaspiliopoulos (2018, arXiv:1610.09641v3 [stat.ML]). The former propose $N$ particles at each time step to exploit the model's 'decorrelation-over-time' property and thus scale favourably with the time horizon, $T$ , but break down if the dimension of the latent states, $D$, is large. The latter leverage gradient-/prior-informed local proposals to scale favourably with $D$ but exhibit sub-optimal scalability with $T$ due to a lack of model-structure exploitation. We introduce methods which combine the strengths of both approaches. The first, Particle-MALA, spreads $N$ particles locally around the current state using gradient information, thus extending MALA to $T > 1$ time steps and $N > 1$ proposals. The second, Particle-mGRAD, additionally incorporates (conditionally) Gaussian prior dynamics into the proposal, thus extending the mGRAD algorithm to $T > 1$ time steps and $N > 1$ proposals. We prove that Particle-mGRAD interpolates between CSMC and Particle-MALA, resolving the 'tuning problem' of choosing between CSMC (superior for highly informative prior dynamics) and Particle-MALA (superior for weakly informative prior dynamics). We similarly extend other 'classical' MCMC approaches like auxiliary MALA, aGRAD, and preconditioned Crank-Nicolson-Langevin (PCNL) to $T > 1$ time steps and $N > 1$ proposals. In experiments, for both highly and weakly informative prior dynamics, our methods substantially improve upon both CSMC and sophisticated 'classical' MCMC approaches.
Risk-Sensitive Stochastic Optimal Control as Rao-Blackwellized Markovian Score Climbing
Dec 21, 2023Stochastic optimal control of dynamical systems is a crucial challenge in sequential decision-making. Recently, control-as-inference approaches have had considerable success, providing a viable risk-sensitive framework to address the exploration-exploitation dilemma. Nonetheless, a majority of these techniques only invoke the inference-control duality to derive a modified risk objective that is then addressed within a reinforcement learning framework. This paper introduces a novel perspective by framing risk-sensitive stochastic control as Markovian score climbing under samples drawn from a conditional particle filter. Our approach, while purely inference-centric, provides asymptotically unbiased estimates for gradient-based policy optimization with optimal importance weighting and no explicit value function learning. To validate our methodology, we apply it to the task of learning neural non-Gaussian feedback policies, showcasing its efficacy on numerical benchmarks of stochastic dynamical systems.
Parallel-in-Time Probabilistic Numerical ODE Solvers
Oct 02, 2023



Probabilistic numerical solvers for ordinary differential equations (ODEs) treat the numerical simulation of dynamical systems as problems of Bayesian state estimation. Aside from producing posterior distributions over ODE solutions and thereby quantifying the numerical approximation error of the method itself, one less-often noted advantage of this formalism is the algorithmic flexibility gained by formulating numerical simulation in the framework of Bayesian filtering and smoothing. In this paper, we leverage this flexibility and build on the time-parallel formulation of iterated extended Kalman smoothers to formulate a parallel-in-time probabilistic numerical ODE solver. Instead of simulating the dynamical system sequentially in time, as done by current probabilistic solvers, the proposed method processes all time steps in parallel and thereby reduces the span cost from linear to logarithmic in the number of time steps. We demonstrate the effectiveness of our approach on a variety of ODEs and compare it to a range of both classic and probabilistic numerical ODE solvers.