 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Bayesian Experimental Design for Partially Observed Dynamical Systems
Nov 06, 2025
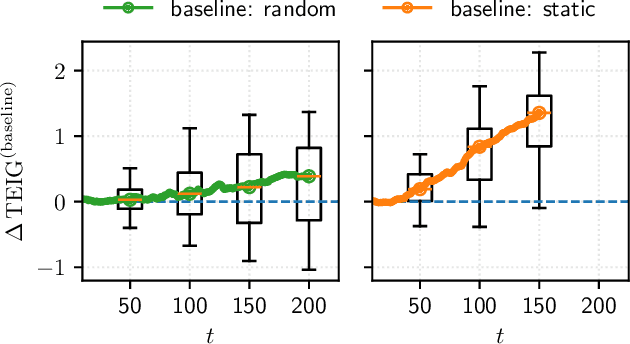
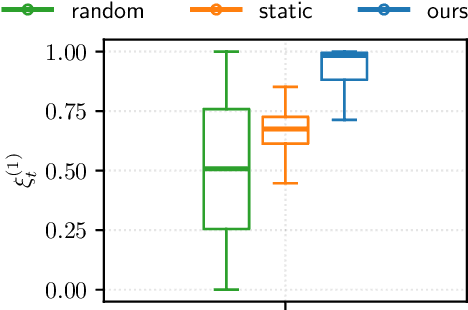
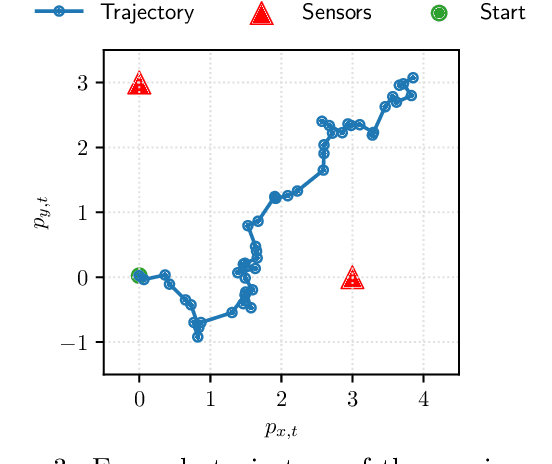
Bayesian experimental design (BED) provides a principled framework for optimizing data collection, but existing approaches do not apply to crucial real-world settings such as dynamical systems with partial observability, where only noisy and incomplete observations are available. These systems are naturally modeled as state-space models (SSMs), where latent states mediate the link between parameters and data, making the likelihood -- and thus information-theoretic objectives like the expected information gain (EIG) -- intractable. In addition, the dynamical nature of the system requires online algorithms that update posterior distributions and select designs sequentially in a computationally efficient manner. We address these challenges by deriving new estimators of the EIG and its gradient that explicitly marginalize latent states, enabling scalable stochastic optimization in nonlinear SSMs. Our approach leverages nested particle filters (NPFs) for efficient online inference with convergence guarantees. Applications to realistic models, such as the susceptible-infected-recovered (SIR) and a moving source location task, show that our framework successfully handles both partial observability and online computation.
Recursive Nested Filtering for Efficient Amortized Bayesian Experimental Design
Sep 09, 2024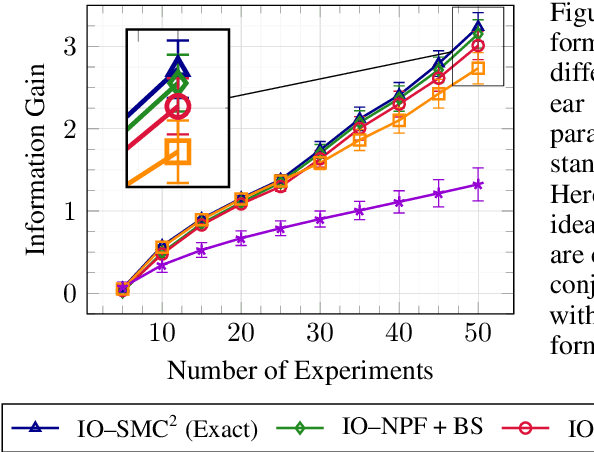
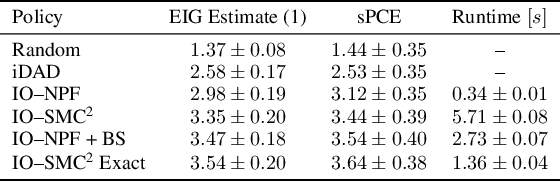
This paper introduces the Inside-Out Nested Particle Filter (IO-NPF), a novel, fully recursive, algorithm for amortized sequential Bayesian experimental design in the non-exchangeable setting. We frame policy optimization as maximum likelihood estimation in a non-Markovian state-space model, achieving (at most) $\mathcal{O}(T^2)$ computational complexity in the number of experiments. We provide theoretical convergence guarantees and introduce a backward sampling algorithm to reduce trajectory degeneracy. IO-NPF offers a practical, extensible, and provably consistent approach to sequential Bayesian experimental design, demonstrating improved efficiency over existing methods.