 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensing with Mobile Devices through Radio SLAM: Models, Methods, Opportunities, and Challenges
Sep 09, 2025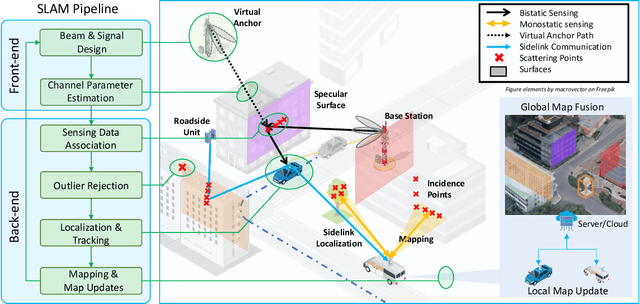
The integration of sensing and communication (ISAC) is a cornerstone of 6G, enabling simultaneous environmental awareness and communication. This paper explores radio SLAM (simultaneous localization and mapping) as a key ISAC approach, using radio signals for mapping and localization. We analyze radio SLAM across different frequency bands, discussing trade-offs in coverage, resolution, and hardware requirements. We also highlight opportunities for integration with sensing, positioning, and cooperative networks. The findings pave the way for standardized solutions in 6G applications such as autonomous systems and industrial robotics.
Robust Snapshot Radio SLAM
Apr 16, 2024



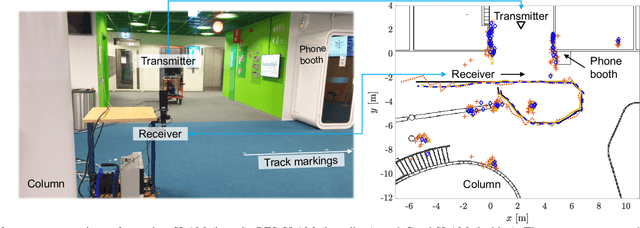
The intrinsic geometric connections between millimeter-wave (mmWave) signals and the propagation environment can be leveraged for simultaneous localization and mapping (SLAM) in 5G and beyond networks. However, estimated channel parameters that are mismatched to the utilized geometric model can cause the SLAM solution to degrade. In this paper, we propose a robust snapshot radio SLAM algorithm for mixed line-of-sight (LoS) and non-line-of-sight (NLoS) environments that can estimate the unknown user equipment (UE) state, map of the environment as well as the presence of the LoS path. The proposed method can accurately detect outliers and the LoS path, enabling robust estimation in both LoS and NLoS conditions. The proposed method is validated using 60 GHz experimental data, indicating superior performance compared to the state-of-the-art.
Millimeter-wave Radio SLAM: End-to-End Processing Methods and Experimental Validation
Dec 21, 2023In this article, we address the timely topic of cellular bistatic simultaneous localization and mapping (SLAM) with specific focus on complete processing solutions from raw I/Q samples to user equipment (UE) and landmark location information in millimeter-wave (mmWave) networks. Firstly, we propose a new multipath channel parameter estimation solution which operates directly with beam reference signal received power (BRSRP) measurements, alleviating the need to know the true antenna beampatterns or the underlying beamforming weights. Additionally, the method has built-in robustness against unavoidable antenna sidelobes. Secondly, we propose new snapshot SLAM algorithms that have increased robustness and identifiability compared to prior-art, in practical built environments with complex clutter and multi-bounce propagation scenarios. The performance of the proposed methods is assessed at the 60 GHz mmWave band, via both realistic ray-tracing evaluations as well as true experimental measurements, in an indoor environment. Wide set of offered results clearly demonstrate the improved performance, compared to the relevant prior-art, in terms of the channel parameter estimation as well as the end-to-end SLAM performance. Finally, the article provides the measured 60 GHz data openly available for the research community, facilitating results reproducibility as well as further algorithm development.
Radio-based Sensing and Environment Mapping in Millimeter-Wave 5G and Beyond Networks
Feb 23, 2021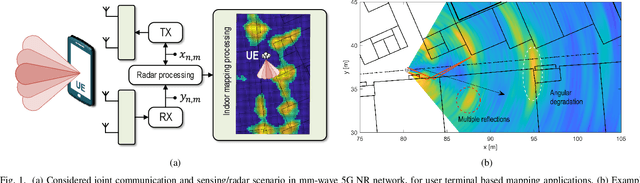
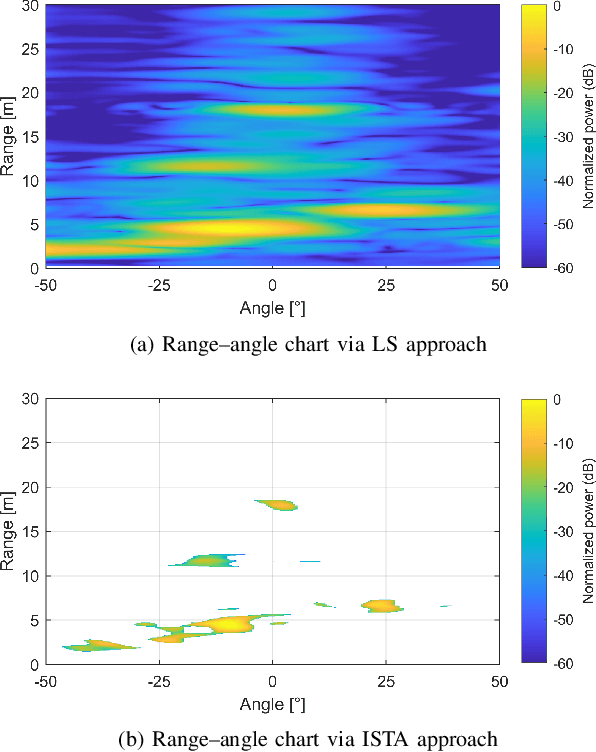
Integrating efficient connectivity, positioning and sensing functionalities into 5G New Radio (NR) and beyond mobile cellular systems is one timely research paradigm, especially at mm-wave and sub-THz bands. In this article, we address the radio-based sensing and environment mapping prospect with specific emphasis on the user equipment (UE) side. We first describe an efficient l1-regularized least-squares (LS) approach to obtain sparse range--angle charts at individual measurement or sensing locations. For the subsequent environment mapping, we then describe both grid-based static solution as well as more advanced tracking-based dynamic approaches, where interaction multiple-model extended Kalman filtering and smoothing are utilized. We provide numerical indoor mapping results at 28~GHz band deploying OFDM-based 5G NR uplink waveform with 400~MHz channel bandwidth, covering both accurate ray-tracing based as well as actual RF measurement results. The results illustrate the superiority of the dynamic tracking-based solutions, while overall demonstrate the excellent prospects of radio-based environment sensing and mapping in future mm-wave networks.
Joint Positioning and Tracking via NR Sidelink in 5G-Empowered Industrial IoT
Jan 15, 2021
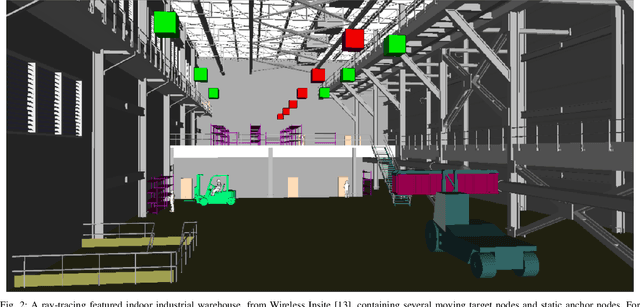
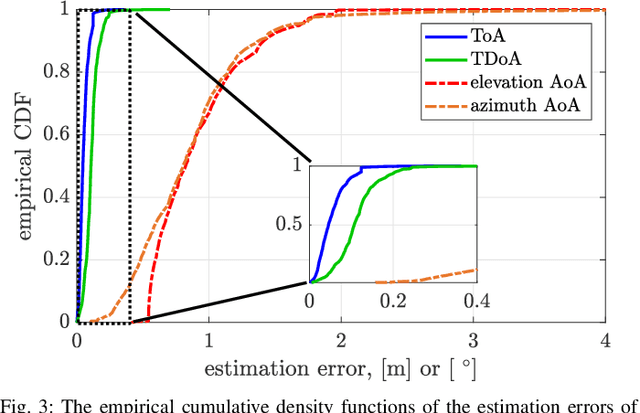
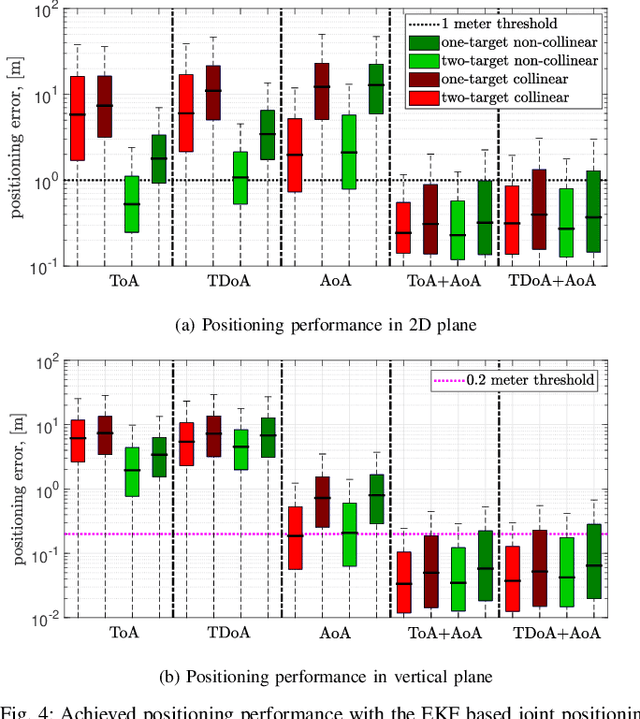
The fifth generation (5G) mobile networks with enhanced connectivity and positioning capabilities play an increasingly important role in the development of autonomous and other advanced industrial systems. In this article, we address the prospects of 5G New Radio (NR) sidelink based ad-hoc networks and their applicability for increasing the situational awareness, in terms of continuous tracking of moving connected machines and vehicles, in industrial systems. For increased system flexibility and fast deployments, we assume that the locations of the so-called anchor nodes are unknown, and describe an extended Kalman filter-based joint positioning and tracking framework in which the locations of both the anchor nodes and the target nodes can be estimated simultaneously. We assess and demonstrate the achievable 3D positioning and tracking performance in the context of a realistic industrial warehouse facility, through extensive ray-tracing based evaluations at the 26 GHz NR band. Our findings show that when both angle-based and time-based measurements are utilized, reaching sub-1 meter accuracy is realistic and that the system is also relatively robust against different node geometries. Finally, several research challenges towards achieving robust, high-performance and cost-efficient positioning solutions are outlined and discussed, identifying various potential directions for future work.