 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoseFM: Relative Camera Pose Estimation Through Flow Matching
Apr 24, 2026Monocular visual odometry (VO) is a fundamental computer vision problem with applications in autonomous navigation, augmented reality and more. While deep learning-based methods have recently shown superior accuracy compared to traditional geometric pipelines, particularly in environments where handcrafted features struggle due to poor structure or lighting conditions, most rely on deterministic regression, which lacks the uncertainty awareness required for robust applications. We propose PoseFM, the first framework to reformulate monocular frame-to-frame VO as a generative task using Flow Matching (FM). By leveraging FM, we model camera motion as a distribution rather than a point estimate, learning to transform noise into realistic pose predictions via continuous-time ODEs. This approach provides a principled mechanism for uncertainty estimation and enables robust motion inference under challenging visual conditions. In our evaluations, PoseFM achieves strong performance on TartanAir, KITTI and TUM-RGBD benchmarks, achieving the lowest absolute trajectory error (ATE) on some of the trajectories and overall being competitive with the best frame-to-frame monocular VO methods. Code and model checkpoints will be made available at https://github.com/helsinki-sda-group/posefm.
Integrating Lagrangian Neural Networks into the Dyna Framework for Reinforcement Learning
Mar 09, 2026Model-based reinforcement learning (MBRL) is sample-efficient but depends on the accuracy of the learned dynamics, which are often modeled using black-box methods that do not adhere to physical laws. Those methods tend to produce inaccurate predictions when presented with data that differ from the original training set. In this work, we employ Lagrangian neural networks (LNNs), which enforce an underlying Lagrangian structure to train the model within a Dyna-based MBRL framework. Furthermore, we train the LNN using stochastic gradient-based and state-estimation-based optimizers to learn the network's weights. The state-estimation-based method converges faster than the stochastic gradient-based method during neural network training. Simulation results are provided to illustrate the effectiveness of the proposed LNN-based Dyna framework for MBRL.
Error Patterns in Historical OCR: A Comparative Analysis of TrOCR and a Vision-Language Model
Feb 16, 2026Optical Character Recognition (OCR) of eighteenth-century printed texts remains challenging due to degraded print quality, archaic glyphs, and non-standardized orthography. Although transformer-based OCR systems and Vision-Language Models (VLMs) achieve strong aggregate accuracy, metrics such as Character Error Rate (CER) and Word Error Rate (WER) provide limited insight into their reliability for scholarly use. We compare a dedicated OCR transformer (TrOCR) and a general-purpose Vision-Language Model (Qwen) on line-level historical English texts using length-weighted accuracy metrics and hypothesis driven error analysis. While Qwen achieves lower CER/WER and greater robustness to degraded input, it exhibits selective linguistic regularization and orthographic normalization that may silently alter historically meaningful forms. TrOCR preserves orthographic fidelity more consistently but is more prone to cascading error propagation. Our findings show that architectural inductive biases shape OCR error structure in systematic ways. Models with similar aggregate accuracy can differ substantially in error locality, detectability, and downstream scholarly risk, underscoring the need for architecture-aware evaluation in historical digitization workflows.
Creating a Historical Migration Dataset from Finnish Church Records, 1800-1920
Jun 09, 2025
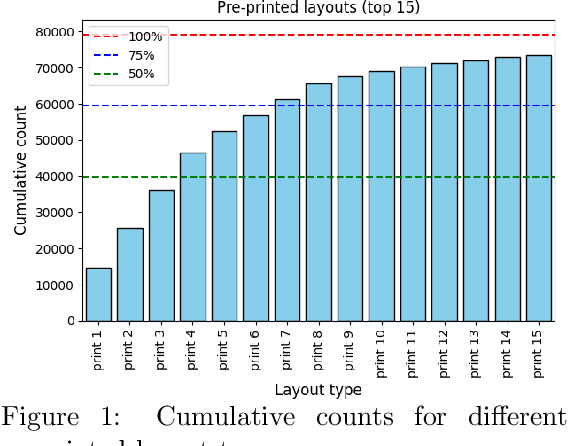

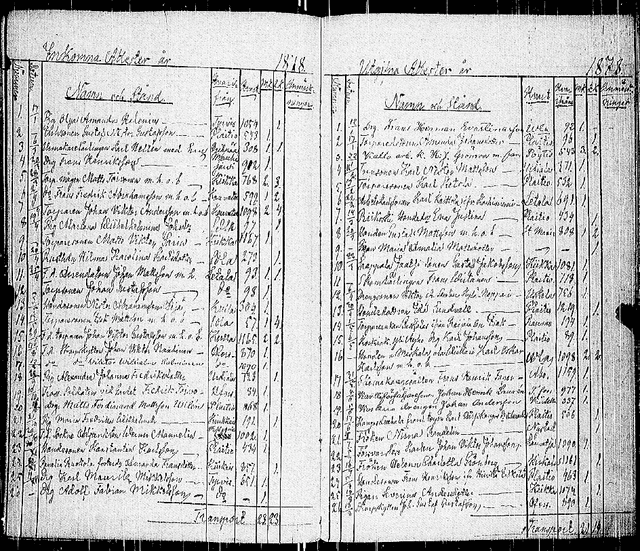
This article presents a large-scale effort to create a structured dataset of internal migration in Finland between 1800 and 1920 using digitized church moving records. These records, maintained by Evangelical-Lutheran parishes, document the migration of individuals and families and offer a valuable source for studying historical demographic patterns. The dataset includes over six million entries extracted from approximately 200,000 images of handwritten migration records. The data extraction process was automated using a deep learning pipeline that included layout analysis, table detection, cell classification, and handwriting recognition. The complete pipeline was applied to all images, resulting in a structured dataset suitable for research. The dataset can be used to study internal migration, urbanization, and family migration, and the spread of disease in preindustrial Finland. A case study from the Elim\"aki parish shows how local migration histories can be reconstructed. The work demonstrates how large volumes of handwritten archival material can be transformed into structured data to support historical and demographic research.
Combining Bayesian Inference and Reinforcement Learning for Agent Decision Making: A Review
May 12, 2025Bayesian inference has many advantages in decision making of agents (e.g. robotics/simulative agent) over a regular data-driven black-box neural network: Data-efficiency, generalization, interpretability, and safety where these advantages benefit directly/indirectly from the uncertainty quantification of Bayesian inference. However, there are few comprehensive reviews to summarize the progress of Bayesian inference on reinforcement learning (RL) for decision making to give researchers a systematic understanding. This paper focuses on combining Bayesian inference with RL that nowadays is an important approach in agent decision making. To be exact, this paper discusses the following five topics: 1) Bayesian methods that have potential for agent decision making. First basic Bayesian methods and models (Bayesian rule, Bayesian learning, and Bayesian conjugate models) are discussed followed by variational inference, Bayesian optimization, Bayesian deep learning, Bayesian active learning, Bayesian generative models, Bayesian meta-learning, and lifelong Bayesian learning. 2) Classical combinations of Bayesian methods with model-based RL (with approximation methods), model-free RL, and inverse RL. 3) Latest combinations of potential Bayesian methods with RL. 4) Analytical comparisons of methods that combine Bayesian methods with RL with respect to data-efficiency, generalization, interpretability, and safety. 5) In-depth discussions in six complex problem variants of RL, including unknown reward, partial-observability, multi-agent, multi-task, non-linear non-Gaussian, and hierarchical RL problems and the summary of how Bayesian methods work in the data collection, data processing and policy learning stages of RL to pave the way for better agent decision-making strategies.
WHITE PAPER: Protecting GNSS Against Intentional Interference
Aug 24, 2022
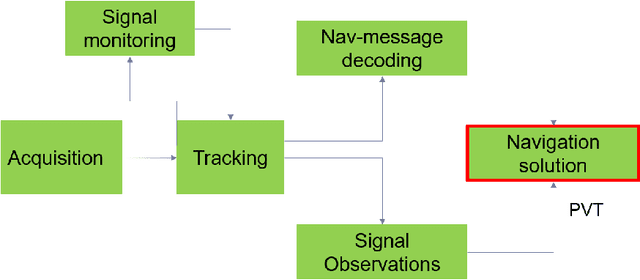
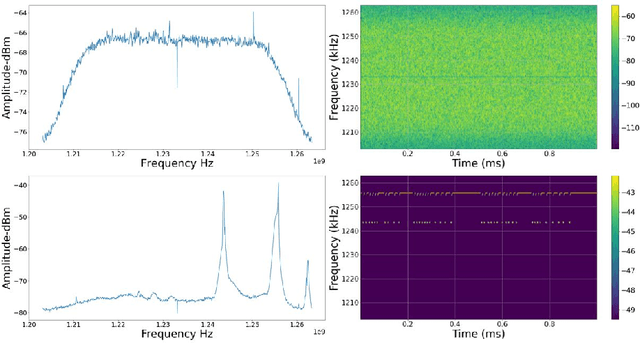
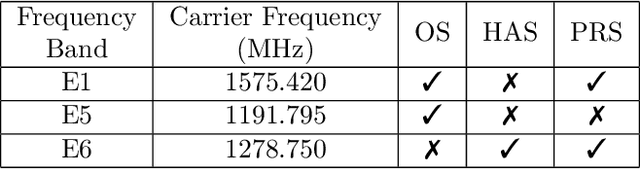
The vulnerabilities associated with modern systems relying on Global Navigation Satellite Systems (GNSS) due to intentional and unintentional interference is an increasing threat. Since radio frequency interference (RFI) significantly degrades the performance of a GNSS receiver. Several traditional critical applications such as aviation, maritime and rail transport systems to more recent applications such as autonomous vehicles, can be severely affected by such undetected nor mitigated RFIs. Moreover, critical infrastructures such as power supply and money transfer, are becoming more and more dependent on the accurate timing information provided by GNSS. Thus, interference detection and management techniques are crucial to be utilised in order to reduce interference effects. This paper offers a state-of-the-art review of several proposed methods for interference detection and mitigation with solutions ranging from traditional to machine learning-based approaches. In addition, to be able to characterise the RFI threats and develop mitigation techniques, it is essential to monitor RFI systematically and share recorded data with interested entities. Therefore, three GNSS threat monitoring systems are briefly described. This White paper is a compilation of the seminar presentations given at a seminar on "Protecting GNSS against intentional interference" in March 2022 in Finland.
A CNN Approach for 5G mmWave Positioning Using Beamformed CSI Measurements
Apr 30, 2022

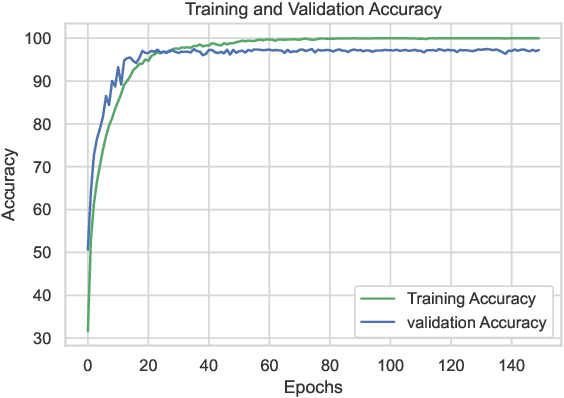
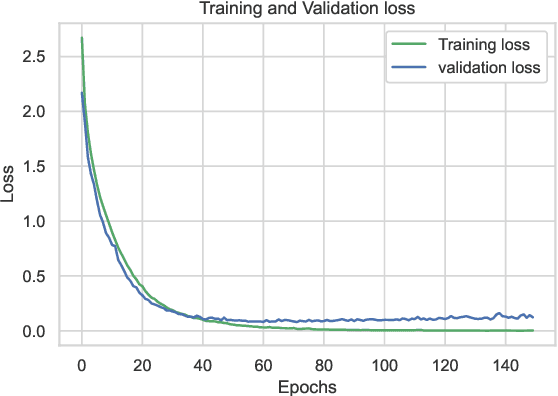
The advent of Artificial Intelligence (AI) has impacted all aspects of human life. One of the concrete examples of AI impact is visible in radio positioning. In this article, for the first time we utilize the power of AI by training a Convolutional Neural Network (CNN) using 5G New Radio (NR) fingerprints consisting of beamformed Channel State Information (CSI). By observing CSI, it is possible to characterize the multipath channel between the transmitter and the receiver, and thus provide a good source of spatiotemporal data to find the position of a User Equipment (UE). We collect ray-tracing-based 5G NR CSI from an urban area. The CSI data of the signals from one Base Station (BS) is collected at the reference points with known positions to train a CNN. We evaluate our work by testing: a) the robustness of the trained network for estimating the positions for the new measurements on the same reference points and b) the accuracy of the CNN-based position estimation while the UE is on points other than the reference points. The results prove that our trained network for a specific urban environment can estimate the UE position with a minimum mean error of 0.98 m.
Cooperative Localization Utilizing Reinforcement Learning for 5G Networks
Aug 19, 2021
The demand for accurate localization has risen in recent years to enable the emerging of autonomous vehicles. To have these vehicles in the traffic ecosystem of smart cities, the need for an accurate positioning system is emphasized. To realize accurate positioning, collaborative localization plays an important role. This type of localization computes range measurements between vehicles and improves the accuracy of position by correcting the possibly faulty values of one of them by using the more accurate values of the other. 5G signals with the technology of Millimeter Wave (mmWave) support precise range measurements and 5G networks provide Device to Device (D2D) communication which improves collaborative localization. The aim of this paper is to provide an accurate collaborative positioning for autonomous vehicles, which is less prone to errors utilizing reinforcement learning technique for selecting the most accurate and suitable range measurement technique for the 5G signal.