 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Inference Framework for Closed-Loop Sensing, Communication, and Control in UAV Systems
Sep 17, 2025Integrated sensing and communication (ISAC) is a core technology for 6G, and its application to closed-loop sensing, communication, and control (SCC) enables various services. Existing SCC solutions often treat sensing and control separately, leading to suboptimal performance and resource usage. In this work, we introduce the active inference framework (AIF) into SCC-enabled unmanned aerial vehicle (UAV) systems for joint state estimation, control, and sensing resource allocation. By formulating a unified generative model, the problem reduces to minimizing variational free energy for inference and expected free energy for action planning. Simulation results show that both control cost and sensing cost are reduced relative to baselines.
Cross-layer Integrated Sensing and Communication: A Joint Industrial and Academic Perspective
May 16, 2025



Integrated sensing and communication (ISAC) enables radio systems to simultaneously sense and communicate with their environment. This paper, developed within the Hexa-X-II project funded by the European Union, presents a comprehensive cross-layer vision for ISAC in 6G networks, integrating insights from physical-layer design, hardware architectures, AI-driven intelligence, and protocol-level innovations. We begin by revisiting the foundational principles of ISAC, highlighting synergies and trade-offs between sensing and communication across different integration levels. Enabling technologies, such as multiband operation, massive and distributed MIMO, non-terrestrial networks, reconfigurable intelligent surfaces, and machine learning, are analyzed in conjunction with hardware considerations including waveform design, synchronization, and full-duplex operation. To bridge implementation and system-level evaluation, we introduce a quantitative cross-layer framework linking design parameters to key performance and value indicators. By synthesizing perspectives from both academia and industry, this paper outlines how deeply integrated ISAC can transform 6G into a programmable and context-aware platform supporting applications from reliable wireless access to autonomous mobility and digital twinning.
Accelerate Reinforcement Learning with PID Controllers in the Pendulum Simulations
Oct 03, 2022



We propose a Proportional Integral Derivative (PID) controller-based coaching scheme to expedite reinforcement learning (RL).
GNN-PMB: A Simple but Effective Online 3D Multi-Object Tracker without Bells and Whistles
Jun 21, 2022


Multi-object tracking (MOT) is among crucial applications in modern advanced driver assistance systems (ADAS) and autonomous driving (AD) systems. Most solutions to MOT are based on random vector Bayesian filters like global nearest neighbor (GNN) plus rule-based heuristical track maintenance. With the development of random finite set (RFS) theory, the RFS Bayesian filters have been applied in MOT tasks for ADAS and AD systems recently. However, their usefulness in the real traffic is open to doubt due to computational cost and implementation complexity. In this paper, it is revealed that GNN with rule-based heuristic track maintenance is insufficient for LiDAR-based MOT tasks in ADAS and AD systems. This judgement is illustrated by systematically comparing several different multi-point object filter-based tracking frameworks, including traditional random vector Bayesian filters with rule-based heuristical track maintenance and RFS Bayesian filters. Moreover, a simple and effective tracker, namely Poisson multi-Bernoulli filter using global nearest neighbor (GNN-PMB) tracker, is proposed for LiDAR-based MOT tasks. The proposed GNN-PMB tracker achieves competitive results in nuScenes test dataset, and shows superior tracking performance over other state-of-the-art LiDAR only trackers and LiDAR and camera fusion-based trackers.
Deep Instance Segmentation with High-Resolution Automotive Radar
Oct 05, 2021
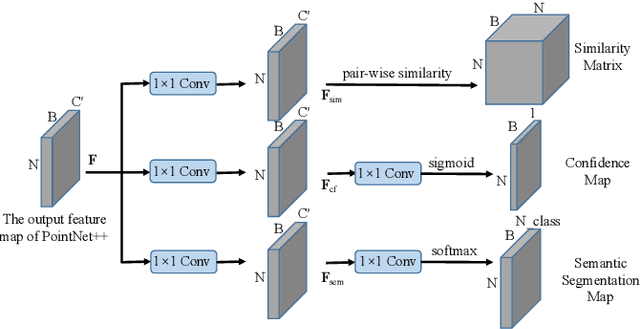
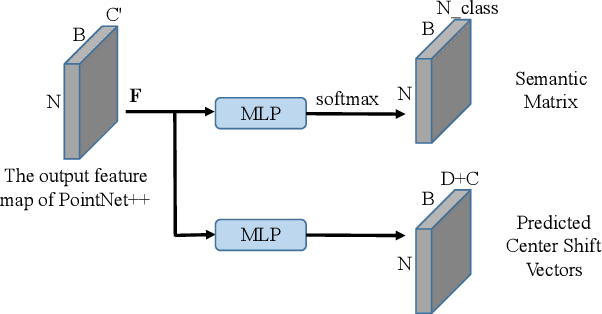
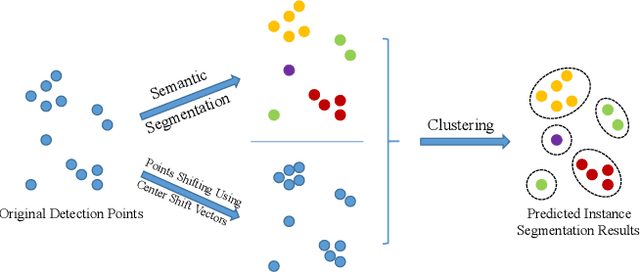
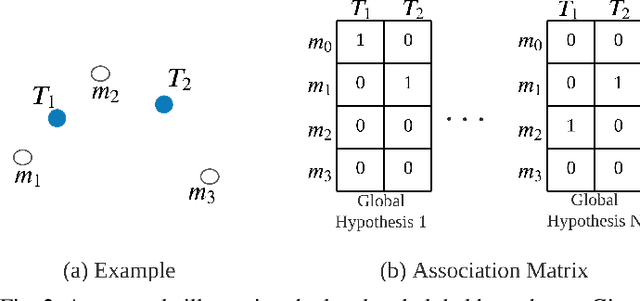
Automotive radar has been widely used in the modern advanced driver assistance systems (ADAS) and autonomous driving system as it provides reliable environmental perception in all-weather conditions with affordable cost. However, automotive radar usually only plays as an auxiliary sensor since it hardly supplies semantic and geometry information due to the sparsity of radar detection points. Nonetheless, as development of high-resolution automotive radar in recent years, more advanced perception functionality like instance segmentation which has only been well explored using Lidar point clouds, becomes possible by using automotive radar. Its data comes with rich contexts such as Radar Cross Section (RCS) and micro-doppler effects which may potentially be pertinent, and sometimes can even provide detection when the field of view is completely obscured. Therefore, the effective utilization of radar detection points data is an integral part of automotive perception. The outcome from instance segmentation could be seen as comparable result of clustering, and could be potentially used as the input of tracker for tracking the targets. In this paper, we propose two efficient methods for instance segmentation with radar detection points, one is implemented in an end-to-end deep learning driven fashion using PointNet++ framework, and the other is based on clustering of the radar detection points with semantic information. Both approaches can be further improved by implementing visual multi-layer perceptron (MLP). The effectiveness of the proposed methods is verified using experimental results on the recent RadarScenes dataset.