 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Instance Segmentation with High-Resolution Automotive Radar
Paper and Code
Oct 05, 2021
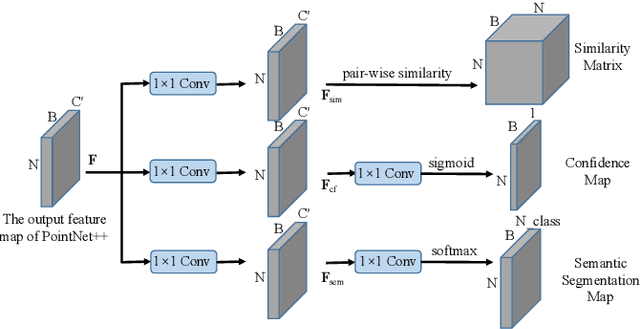
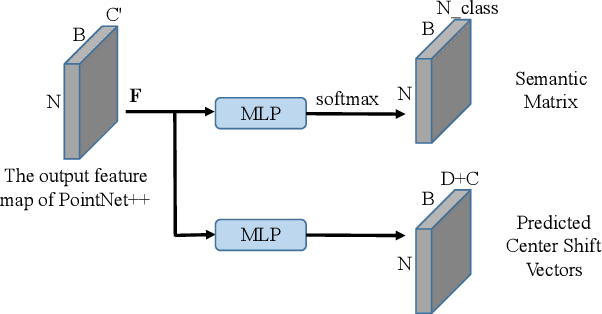
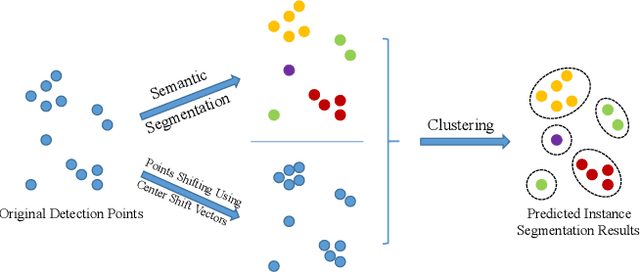
Automotive radar has been widely used in the modern advanced driver assistance systems (ADAS) and autonomous driving system as it provides reliable environmental perception in all-weather conditions with affordable cost. However, automotive radar usually only plays as an auxiliary sensor since it hardly supplies semantic and geometry information due to the sparsity of radar detection points. Nonetheless, as development of high-resolution automotive radar in recent years, more advanced perception functionality like instance segmentation which has only been well explored using Lidar point clouds, becomes possible by using automotive radar. Its data comes with rich contexts such as Radar Cross Section (RCS) and micro-doppler effects which may potentially be pertinent, and sometimes can even provide detection when the field of view is completely obscured. Therefore, the effective utilization of radar detection points data is an integral part of automotive perception. The outcome from instance segmentation could be seen as comparable result of clustering, and could be potentially used as the input of tracker for tracking the targets. In this paper, we propose two efficient methods for instance segmentation with radar detection points, one is implemented in an end-to-end deep learning driven fashion using PointNet++ framework, and the other is based on clustering of the radar detection points with semantic information. Both approaches can be further improved by implementing visual multi-layer perceptron (MLP). The effectiveness of the proposed methods is verified using experimental results on the recent RadarScenes dataset.