 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicular Wireless Positioning -- A Survey
Jan 28, 2026The rapid advancement of connected and autonomous vehicles has driven a growing demand for precise and reliable positioning systems capable of operating in complex environments. Meeting these demands requires an integrated approach that combines multiple positioning technologies, including wireless-based systems, perception-based technologies, and motion-based sensors. This paper presents a comprehensive survey of wireless-based positioning for vehicular applications, with a focus on satellite-based positioning (such as global navigation satellite systems (GNSS) and low-Earth-orbit (LEO) satellites), cellular-based positioning (5G and beyond), and IEEE-based technologies (including Wi-Fi, ultrawideband (UWB), Bluetooth, and vehicle-to-vehicle (V2V) communications). First, the survey reviews a wide range of vehicular positioning use cases, outlining their specific performance requirements. Next, it explores the historical development, standardization, and evolution of each wireless positioning technology, providing an in-depth categorization of existing positioning solutions and algorithms, and identifying open challenges and contemporary trends. Finally, the paper examines sensor fusion techniques that integrate these wireless systems with onboard perception and motion sensors to enhance positioning accuracy and resilience in real-world conditions. This survey thus offers a holistic perspective on the historical foundations, current advancements, and future directions of wireless-based positioning for vehicular applications, addressing a critical gap in the literature.
Cross-layer Integrated Sensing and Communication: A Joint Industrial and Academic Perspective
May 16, 2025



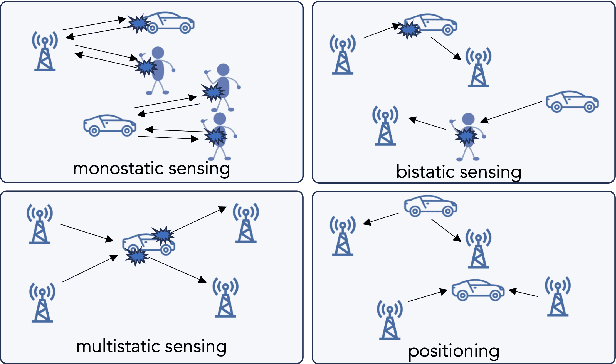
Integrated sensing and communication (ISAC) enables radio systems to simultaneously sense and communicate with their environment. This paper, developed within the Hexa-X-II project funded by the European Union, presents a comprehensive cross-layer vision for ISAC in 6G networks, integrating insights from physical-layer design, hardware architectures, AI-driven intelligence, and protocol-level innovations. We begin by revisiting the foundational principles of ISAC, highlighting synergies and trade-offs between sensing and communication across different integration levels. Enabling technologies, such as multiband operation, massive and distributed MIMO, non-terrestrial networks, reconfigurable intelligent surfaces, and machine learning, are analyzed in conjunction with hardware considerations including waveform design, synchronization, and full-duplex operation. To bridge implementation and system-level evaluation, we introduce a quantitative cross-layer framework linking design parameters to key performance and value indicators. By synthesizing perspectives from both academia and industry, this paper outlines how deeply integrated ISAC can transform 6G into a programmable and context-aware platform supporting applications from reliable wireless access to autonomous mobility and digital twinning.
6G RIS-aided Single-LEO Localization with Slow and Fast Doppler Effects
Oct 14, 2024


6G networks aim to enable applications like autonomous driving by providing complementary localization services through key technologies such as non-terrestrial networks (NTNs) with low Earth orbit (LEO) satellites and reconfigurable intelligent surfaces (RIS). Prior research in 6G localization using single LEO, multi-LEO, and multi-LEO multi-RIS setups has limitations: single LEO lacks the required accuracy, while multi-LEO/RIS setups demand many visible satellites and RISs, which is not always feasible in practice. This paper explores the novel problem of localization with a single LEO satellite and a single RIS, bridging these research areas. We present a comprehensive signal model accounting for user carrier frequency offset (CFO), clock bias, and fast and slow Doppler effects. Additionally, we derive a low-complexity estimator that achieves theoretical bounds at high signal-to-noise ratios (SNR). Our results demonstrate the feasibility and accuracy of RIS-aided single-LEO localization in 6G networks and highlight potential research directions.
Integration of 5G and Motion Sensors for Vehicular Positioning: A Loosely-Coupled Approach
Mar 16, 2024Autonomous vehicles (AVs) are poised to revolutionize the transportation industry by enhancing traffic efficiency and road safety. However, achieving optimal vehicular autonomy demands an uninterrupted and precise positioning solution, especially in deep urban environments. 5G mmWave holds immense potential to provide such a service due to its accurate range and angle measurements. Yet, as mmWave signals are prone to signal blockage, severe positioning errors will occur. Most of the 5G positioning literature relies on constant motion models to bridge such 5G outages, which do not capture the true dynamics of the vehicle. Few proposed methodologies rely on inertial measurement units (IMUs) to bridge such gaps, where they predominantly use tightly coupled (TC) integration schemes, introducing a nonlinear 5G measurement model. Such approaches, which rely on Kalman filtering, necessitate the linearization of the measurement model, leading to pronounced positioning errors. In this paper, however, we propose a loosely coupled (LC) sensor fusion scheme to integrate 5G, IMUs, and odometers to mitigate linearization errors. Additionally, we propose a novel method to design the process covariance matrix of the extended Kalman filter (EKF). Moreover, we propose enhancements to the mechanization of the IMU data to enhance the standalone IMU solution. The proposed methodologies were tested using a novel setup comprising 5G measurements from Siradel's S_5G simulation tool and real IMU and odometer measurements from an hour-long trajectory. The proposed method resulted in 14 cm of error for 95% of the time compared to 1 m provided by the traditional constant velocity model approach.
Joint Communication and Sensing for 6G -- A Cross-Layer Perspective
Feb 14, 2024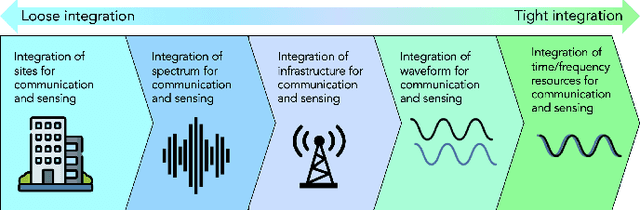
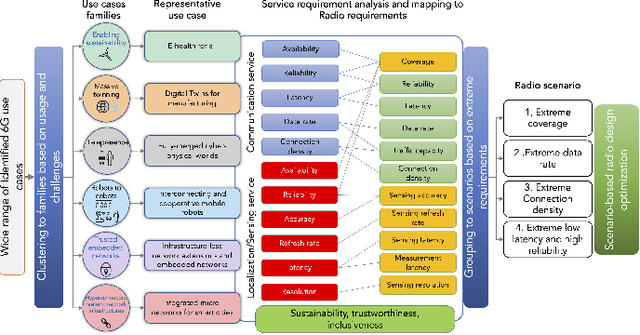
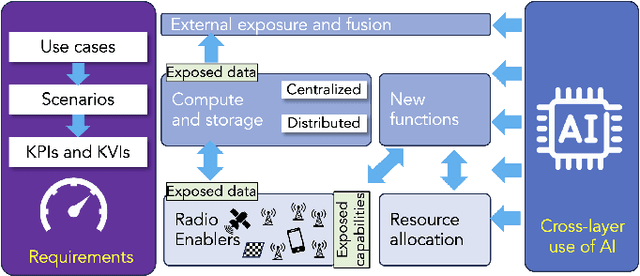
As 6G emerges, cellular systems are envisioned to integrate sensing with communication capabilities, leading to multi-faceted communication and sensing (JCAS). This paper presents a comprehensive cross-layer overview of the Hexa-X-II project's endeavors in JCAS, aligning 6G use cases with service requirements and pinpointing distinct scenarios that bridge communication and sensing. This work relates to these scenarios through the lens of the cross-layer physical and networking domains, covering models, deployments, resource allocation, storage challenges, computational constraints, interfaces, and innovative functions.
On the Ground and in the Sky: A Tutorial on Radio Localization in Ground-Air-Space Networks
Dec 09, 2023The inherent limitations in scaling up ground infrastructure for future wireless networks, combined with decreasing operational costs of aerial and space networks, are driving considerable research interest in multisegment ground-air-space (GAS) networks. In GAS networks, where ground and aerial users share network resources, ubiquitous and accurate user localization becomes indispensable, not only as an end-user service but also as an enabler for location-aware communications. This breaks the convention of having localization as a byproduct in networks primarily designed for communications. To address these imperative localization needs, the design and utilization of ground, aerial, and space anchors require thorough investigation. In this tutorial, we provide an in-depth systemic analysis of the radio localization problem in GAS networks, considering ground and aerial users as targets to be localized. Starting from a survey of the most relevant works, we then define the key characteristics of anchors and targets in GAS networks. Subsequently, we detail localization fundamentals in GAS networks, considering 3D positions and orientations. Afterward, we thoroughly analyze radio localization systems in GAS networks, detailing the system model, design aspects, and considerations for each of the three GAS anchors. Preliminary results are presented to provide a quantifiable perspective on key design aspects in GAS-based localization scenarios. We then identify the vital roles 6G enablers are expected to play in radio localization in GAS networks.
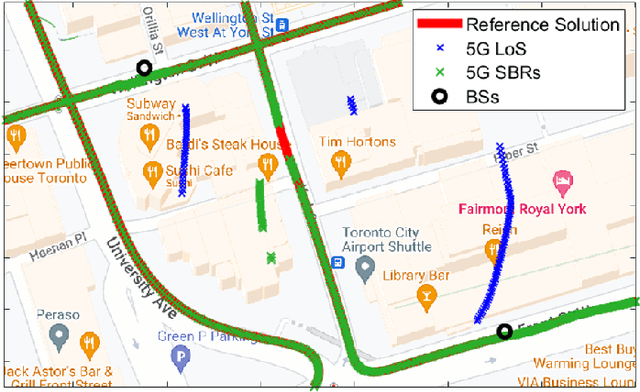
Demonstrating the Merits of Integrating Multipath Signals into 5G LoS-Based Positioning Systems for Navigation in Challenging Environments
Jun 23, 2023Constrained environments, such as indoor and urban settings, present a significant challenge for accurate moving object positioning due to the diminished line-of-sight (LoS)communication with the wireless anchor used for positioning. The 5th generation new radio (5G NR) millimeter wave (mmWave) spectrum promises high multipath resolvability in the time and angle domain, enabling the utilization of multipath signals for such problems rather than mitigating their effects. This paper investigates the benefits of integrating multipath signals into 5G LoS-based positioning systems with onboard motion sensors (OBMS). We provide a comprehensive analysis of the positioning system's performance in various conditions of erroneous 5G measurements and outage scenarios, which offers insights into the system's behavior in challenging environments. To validate our approach, we conducted a road test in downtown Toronto, utilizing actual OBMS measurements gathered from sensors installed in the test vehicle. The results indicate that utilization of multipath signals for wireless positioning operating in multipath-rich environments (e.g. urban and indoor) can bridge 5G LoS signal outages, thus enhancing the reliability and accuracy of the positioning solution. The redundant measurements obtained from the multipath signals can enhance the system's robustness, particularly when low-cost 5G receivers with a limited resolution for angle or range measurements are present. This holds true even when only considering the utilization of single-bounce reflections (SBRs).
Enabling High-Precision 5G mmWave-Based Positioning for Autonomous Vehicles in Dense Urban Environments
May 04, 2023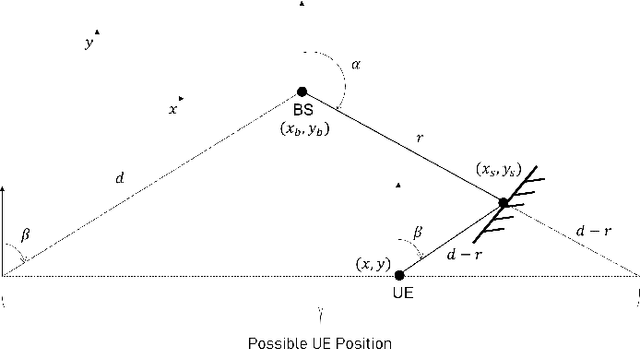
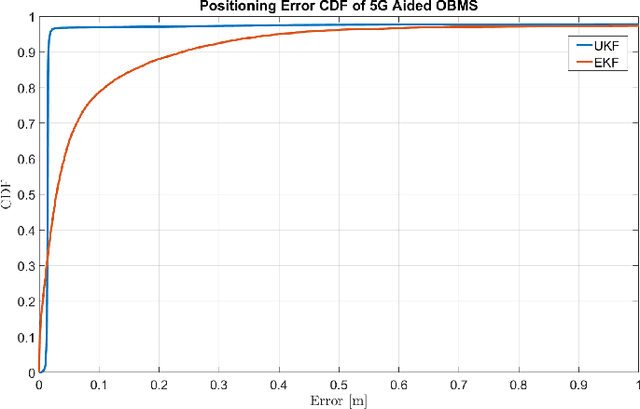
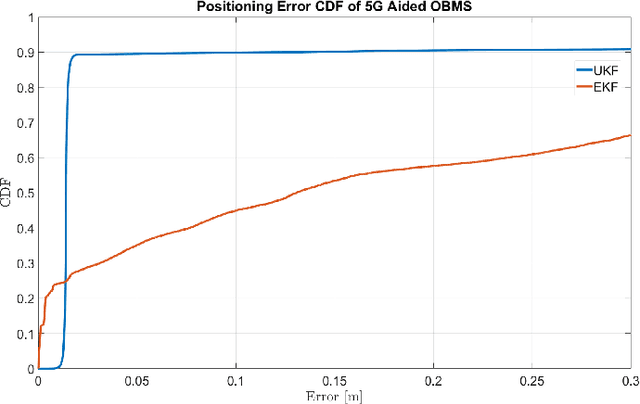
5G-based mmWave wireless positioning has emerged as a promising solution for autonomous vehicle (AV) positioning in recent years. Previous studies have highlighted the benefits of fusing a line-of-sight (LoS) 5G positioning solution with an Inertial Navigation System (INS) for an improved positioning solution. However, the highly dynamic environment of urban areas, where AVs are expected to operate, poses a challenge, as non-line-of-sight (NLoS) communication can deteriorate the 5G mmWave positioning solution and lead to erroneous corrections to the INS. To address this challenge, we exploit 5G multipath and LoS signals to improve positioning performance in dense urban environments. In addition, we integrate the proposed 5G-based positioning with low-cost onboard motion sensors (OBMS). Moreover, the integration is realized using an unscented Kalman filter (UKF) as an alternative to the widely utilized EKF as a fusion engine to avoid ignoring the higher-order and non-linear terms of the dynamic system model. We also introduce techniques to evaluate the quality of each LoS and multipath measurement prior to incorporation into the filter's correction stage. To validate the proposed methodologies, we performed two test trajectories in the dense urban environment of downtown Toronto, Canada. For each trajectory, quasi-real 5G measurements were collected using a ray-tracing tool incorporating 3D map scans of real-world buildings, allowing for realistic multipath scenarios. For the same trajectories, real OBMS data were collected from two-different low-cost IMUs. Our integrated positioning solution was capable of maintaining a level of accuracy below 30 cm for approximately 97% of the time, which is superior to the accuracy level achieved when multipath signals are not considered, which is only around 91% of the time.
Integrated 5G mmWave Positioning in Deep Urban Environments: Advantages and Challenges
May 03, 2023Achieving the highest levels of autonomy within autonomous vehicles (AVs) requires a precise and dependable positioning solution that is not influenced by the environment. 5G mmWave signals have been extensively studied in the literature to provide such a positioning solution. Yet, it is evident that 5G alone will not be able to provide uninterrupted positioning services, as outages are inevitable to occur. Towards that end, few works have explored the benefits of integrating mmWave positioning with onboard motion sensors (OBMS) like inertial measurement units (IMUs) and odometers. Inspired by INS-GNSS integration literature, all methods defaulted to a tightly-coupled (TC) integration scheme, which hinders the potential of such an integration. Additionally, the proposed methods were validated using simulated 5G and INS data with probability-based line-of-sight (LOS) assumptions. Such an experimental setup fails to highlight the true advantages and challenges of 5G-OBMS integration. Therefore, this study first explores a loosely-coupled (LC) 5G-OBMS integration scheme as a viable alternative to TC schemes. Next, it examines the merits and challenges of such an integration in a deep-urban setting using a novel quasi-real simulation setup. The setup comprises quasi-real 5G measurements from the Siradel simulator and real commercial-grade IMU measurements from a challenging one-hour-long trajectory in downtown Toronto. The trajectory featured multiple natural 5G outages which helped with assessing the integration's performance. The proposed LC method achieved a 14-cm level of accuracy for 95% of the time, while significantly limiting positioning errors during natural 5G outages.
A Decentralized Fusion Scheme for 5G Multi-BS Positioning
Mar 07, 2023Fifth generation (5G) networks are expected to provide high precision positioning estimation utilizing mmWave signals in urban and downtown areas. In such areas, 5G base stations (BSs) will be densely deployed, allowing for line-of-sight (LOS) communications between the user equipment (UE) and multiple BSs at the same time. Having access to a plethora of measurement sources grants the need for optimal integration between the BSs to have an accurate and precise positioning solution. Traditionally, 5G multi-BS fusion is conducted via an extended Kalman filter (EKF), that directly utilizes range and angle measurements in a centralized integration scheme. Such measurements have a non-linear relationship with the positioning states of the filter, giving rise to linearization errors. Counter to the common belief, an unscented Kalman filter (UKF) will fail to totally eradicate such linearization errors. In this paper, we argue that a de-centralized integration between 5G BSs would fully avoid linearization errors and would enhance the positioning performance significantly. This is done by fusing position measurements as opposed to directly fusing range and angle measurements, which inherently leads to a linear measurement model by design. The proposed de-centralized KF method was evaluated in a quasi-real simulation setup provided by Siradel using a real trajectory in Downtown Toronto. The experiments compared the performance of de-centralized KF integration to that of centralized EKF and UKF integration schemes. It was shown that the proposed method was able to outperform both UKF and EKF implementations in multiple scenarios as it decreased the RMS and maximum 2D positioning errors significantly, achieving decimeter-level of accuracy for 90.3% of the time.