 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Ground and in the Sky: A Tutorial on Radio Localization in Ground-Air-Space Networks
Dec 09, 2023The inherent limitations in scaling up ground infrastructure for future wireless networks, combined with decreasing operational costs of aerial and space networks, are driving considerable research interest in multisegment ground-air-space (GAS) networks. In GAS networks, where ground and aerial users share network resources, ubiquitous and accurate user localization becomes indispensable, not only as an end-user service but also as an enabler for location-aware communications. This breaks the convention of having localization as a byproduct in networks primarily designed for communications. To address these imperative localization needs, the design and utilization of ground, aerial, and space anchors require thorough investigation. In this tutorial, we provide an in-depth systemic analysis of the radio localization problem in GAS networks, considering ground and aerial users as targets to be localized. Starting from a survey of the most relevant works, we then define the key characteristics of anchors and targets in GAS networks. Subsequently, we detail localization fundamentals in GAS networks, considering 3D positions and orientations. Afterward, we thoroughly analyze radio localization systems in GAS networks, detailing the system model, design aspects, and considerations for each of the three GAS anchors. Preliminary results are presented to provide a quantifiable perspective on key design aspects in GAS-based localization scenarios. We then identify the vital roles 6G enablers are expected to play in radio localization in GAS networks.
Contact-Free Multi-Target Tracking Using Distributed Massive MIMO-OFDM Communication System: Prototype and Analysis
Aug 26, 2022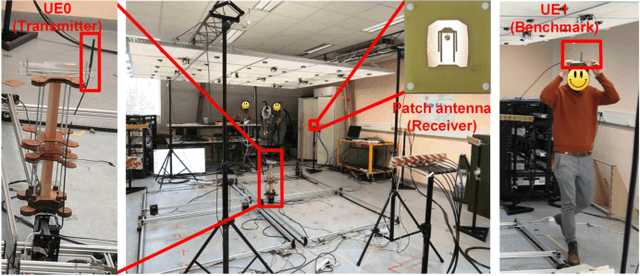
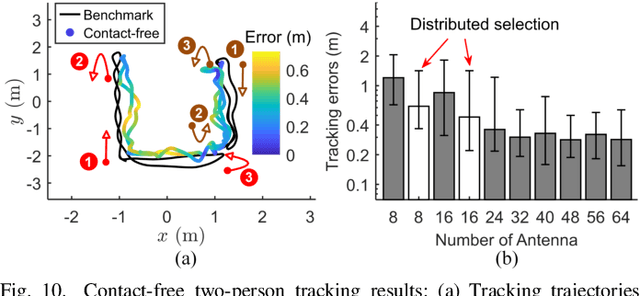
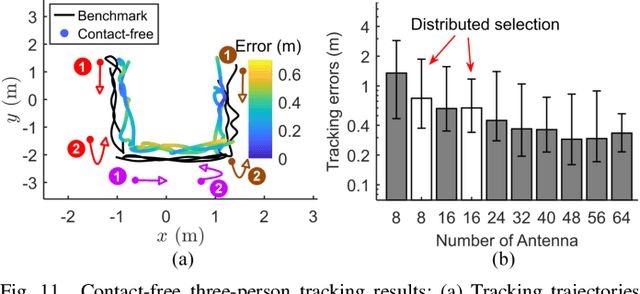
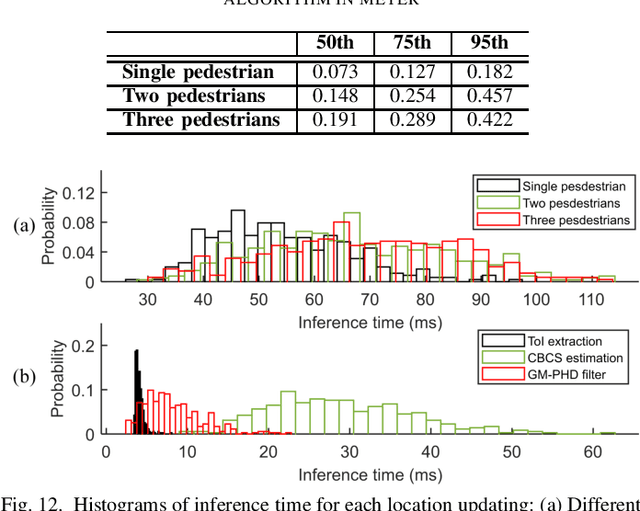
Wireless-based human activity recognition has become an essential technology that enables contact-free human-machine and human-environment interactions. In this paper, we consider contact-free multi-target tracking (MTT) based on available communication systems. A radar-like prototype is built upon a sub-6 GHz distributed massive multiple-input and multiple-output (MIMO) orthogonal frequency-division multiplexing communication system. Specifically, the raw channel state information (CSI) is calibrated in the frequency and antenna domain before being used for tracking. Then the targeted CSIs reflected or scattered from the moving pedestrians are extracted. To evade the complex association problem of distributed massive MIMO-based MTT, we propose to use a complex Bayesian compressive sensing (CBCS) algorithm to estimate the targets' locations based on the extracted target-of-interest CSI signal directly. The estimated locations from CBCS are fed to a Gaussian mixture probability hypothesis density filter for tracking. A multi-pedestrian tracking experiment is conducted in a room with size of 6.5 m$\times$10 m to evaluate the performance of the proposed algorithm. According to experimental results, we achieve 75th and 95th percentile accuracy of 12.7 cm and 18.2 cm for single-person tracking and 28.9 cm and 45.7 cm for multi-person tracking, respectively. Furthermore, the proposed algorithm achieves the tracking purposes in real-time, which is promising for practical MTT use cases.
Towards Fine-Grained Indoor Localization based on Massive MIMO-OFDM System: Perspective of Multipath Components
Mar 30, 2021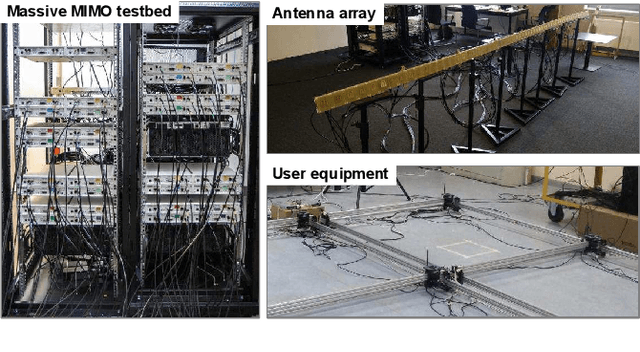
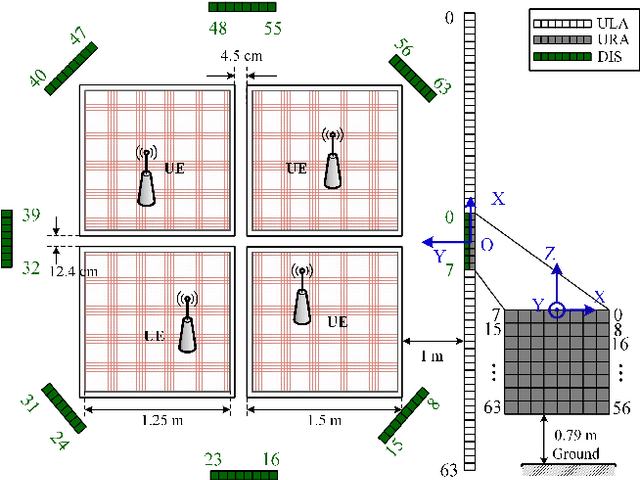
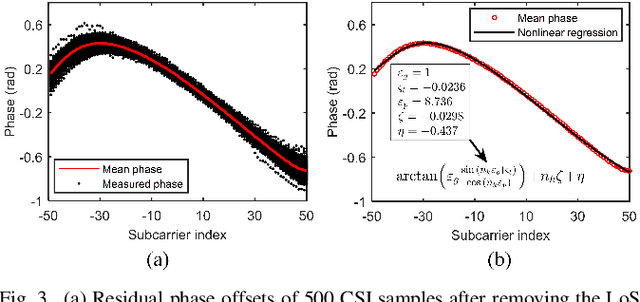
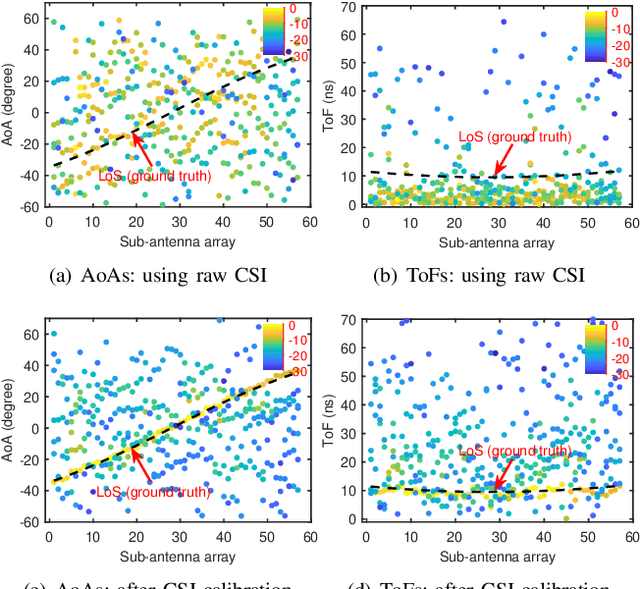
Fine-grained indoor localization has attracted attention recently because of the rapidly growing demand for indoor location-based services (ILBS). Specifically, massive (large-scale) multiple-input and multiple-output (MIMO) systems have received increasing attention due to high angular resolution. This paper presents an indoor localization testbed based on a massive MIMO orthogonal frequency-division multiplexing (OFDM) system, which supports physical-layer channel measurements. Instead of exploiting channel state information (CSI) directly for localization, we focus on positioning from the perspective of multipath components (MPCs), which are extracted from the CSI through the space-alternating generalized expectation-maximization (SAGE) algorithm. On top of the available MPCs, we propose a generalized fingerprinting system based on different single-metric and hybrid-metric schemes. We evaluate the impact of varying antenna topologies, feeding metrics, sizes of the training set, and fingerprinting methods. The experimental results show that the proposed fingerprinting method can achieve centimeter-level positioning accuracy with a relatively small training set. Specifically, the distributed uniform linear array obtains the highest accuracy with about 1.63-2.5-cm mean absolute errors resulting from the high spatial resolution.