 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnmodulated Visible Light Positioning: A Deep Dive into Techniques, Studies, and Future Prospects
Jul 17, 2025Visible Light Positioning (VLP) has emerged as a promising technology for next-generation indoor positioning systems (IPS), particularly within the scope of sixth-generation (6G) wireless networks. Its attractiveness stems from leveraging existing lighting infrastructures equipped with light-emitting diodes (LEDs), enabling cost-efficient deployments and achieving high-precision positioning accuracy in the centimeter-todecimeter range. However, widespread adoption of traditional VLP solutions faces significant barriers due to the increased costs and operational complexity associated with modulating LEDs, which consequently reduces illumination efficiency by lowering their radiant flux. To address these limitations, recent research has introduced the concept of unmodulated Visible Light Positioning (uVLP), which exploits Light Signals of Opportunity (LSOOP) emitted by unmodulated illumination sources such as conventional LEDs. This paradigm offers a cost-effective, lowinfrastructure alternative for indoor positioning by eliminating the need for modulation hardware and maintaining lighting efficiency. This paper delineates the fundamental principles of uVLP, provides a comparative analysis of uVLP versus conventional VLP methods, and classifies existing uVLP techniques according to receiver technologies into intensity-based methods (e.g., photodiodes, solar cells, etc.) and imaging-based methods. Additionally, we propose a comprehensive taxonomy categorizing techniques into demultiplexed and undemultiplexed approaches. Within this structured framework, we critically review current advancements in uVLP, discuss prevailing challenges, and outline promising research directions essential for developing robust, scalable, and widely deployable uVLP solutions.
Soft Multipath Information-Based UWB Tracking in Cluttered Scenarios: Preliminaries and Validations
May 29, 2024



In this paper, we investigate ultra-wideband (UWB) localization and tracking in cluttered environments. Instead of mitigating the multipath, we exploit the specular reflections to enhance the localizability and improve the positioning accuracy. With the assistance of the multipath, it is also possible to achieve localization purposes using fewer anchors or when the line-of-sight propagations are blocked. Rather than using single-value distance, angle, or Doppler estimates for the localization, we model the likelihoods of both the line-of-sight and specular multipath components, namely soft multipath information, and propose the multipath-assisted probabilistic UWB tracking algorithm. Experimental results in a cluttered industrial scenario show that the proposed algorithm achieves 46.4 cm and 33.1 cm 90th percentile errors in the cases of 3 and 4 anchors, respectively, which outperforms conventional methods with more than 61.8% improvement given fewer anchors and strong multipath effect.
Ubiquitous Indoor Positioning and Tracking for Industrial Internet-of-Things: A Channel Response Perspective
Sep 25, 2022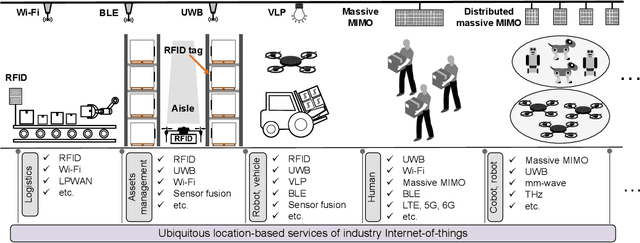
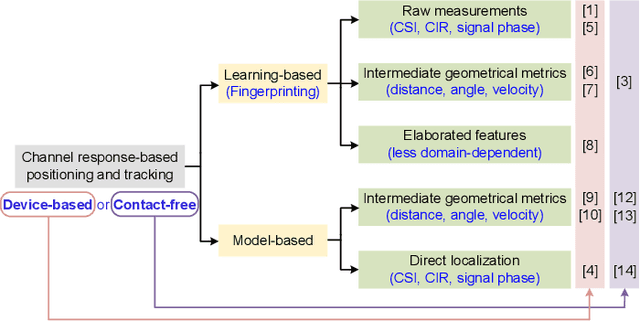
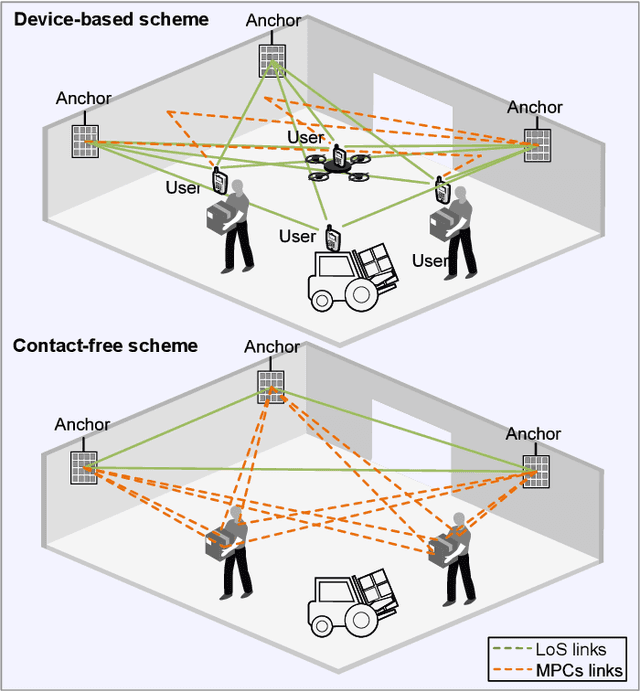
The future of industrial location-aided applications is shaped by the ubiquity of Internet-of-Things (IoT) devices. As an increasing amount of commercial off-the-shelf radio devices support channel response collection, it is possible to achieve fine-grained position estimation at a relatively low cost. In this article, we focus on channel response-based positioning and tracking for industrial IoT applications. We first give an overview of the state of the art (SOTA) of channel response-enabled localization, which is further classified into two categories, \textit{i.e.}, device-based and contact-free schemes. Then we propose a taxonomy for these complementary approaches concerning the involved techniques. Finally, we discuss the practical issues of the SOTA methods for real-world applications and point out future research opportunities for channel response-based positioning and tracking.
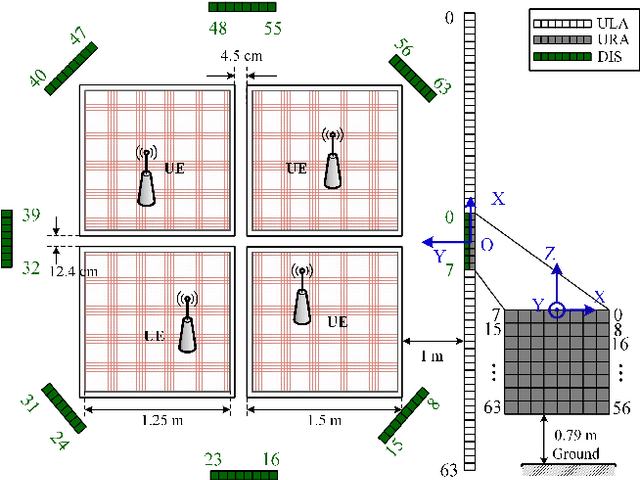
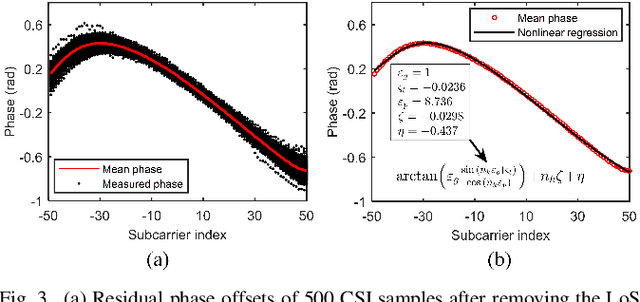
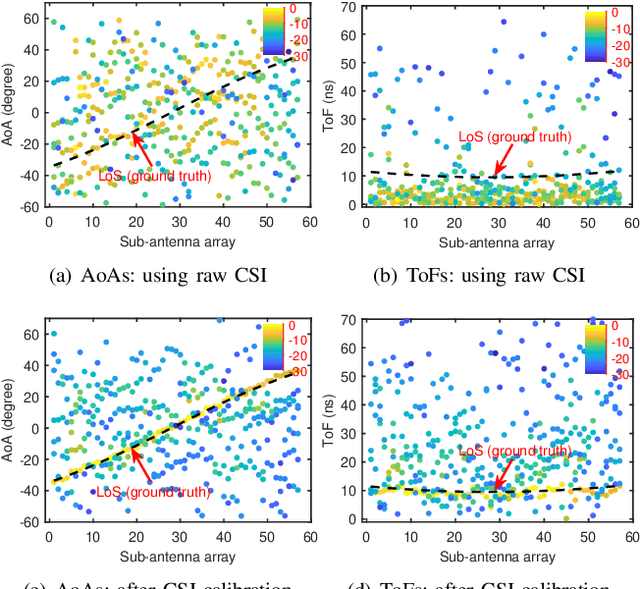
Contact-Free Multi-Target Tracking Using Distributed Massive MIMO-OFDM Communication System: Prototype and Analysis
Aug 26, 2022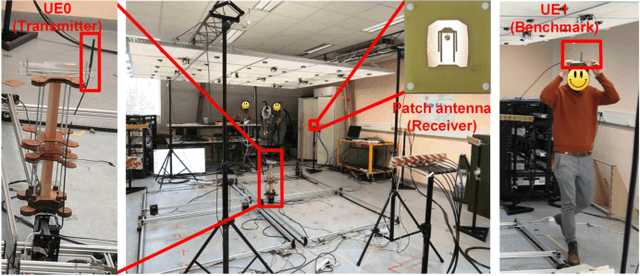
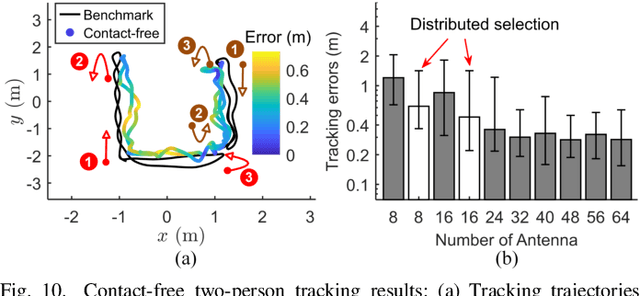
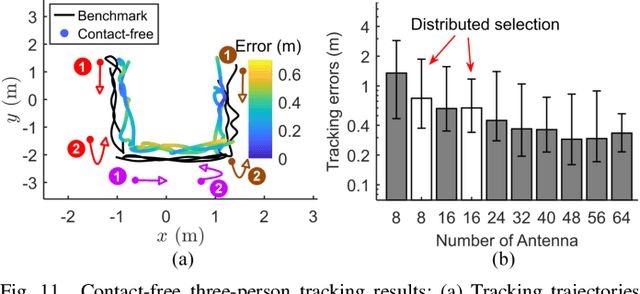
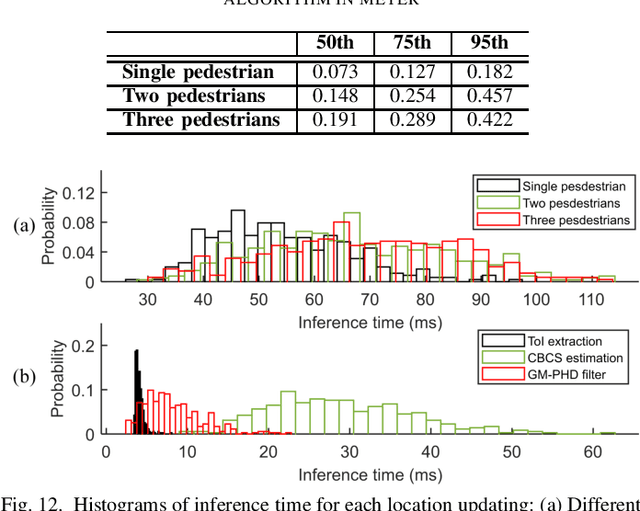
Wireless-based human activity recognition has become an essential technology that enables contact-free human-machine and human-environment interactions. In this paper, we consider contact-free multi-target tracking (MTT) based on available communication systems. A radar-like prototype is built upon a sub-6 GHz distributed massive multiple-input and multiple-output (MIMO) orthogonal frequency-division multiplexing communication system. Specifically, the raw channel state information (CSI) is calibrated in the frequency and antenna domain before being used for tracking. Then the targeted CSIs reflected or scattered from the moving pedestrians are extracted. To evade the complex association problem of distributed massive MIMO-based MTT, we propose to use a complex Bayesian compressive sensing (CBCS) algorithm to estimate the targets' locations based on the extracted target-of-interest CSI signal directly. The estimated locations from CBCS are fed to a Gaussian mixture probability hypothesis density filter for tracking. A multi-pedestrian tracking experiment is conducted in a room with size of 6.5 m$\times$10 m to evaluate the performance of the proposed algorithm. According to experimental results, we achieve 75th and 95th percentile accuracy of 12.7 cm and 18.2 cm for single-person tracking and 28.9 cm and 45.7 cm for multi-person tracking, respectively. Furthermore, the proposed algorithm achieves the tracking purposes in real-time, which is promising for practical MTT use cases.
Multi-Static UWB Radar-based Passive Human Tracking Using COTS Devices
Sep 27, 2021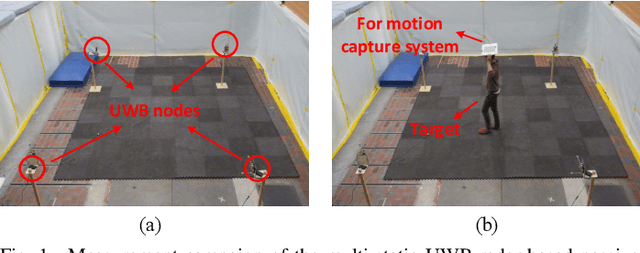
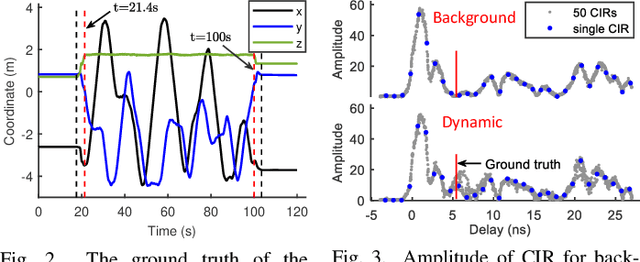
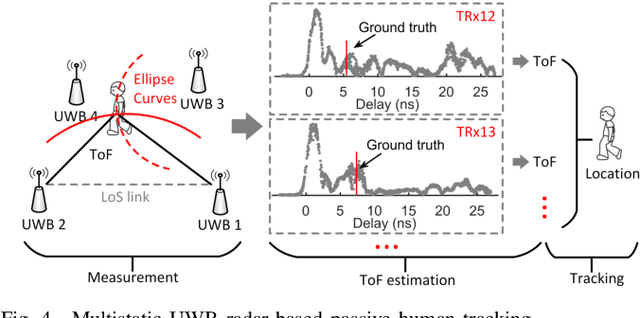
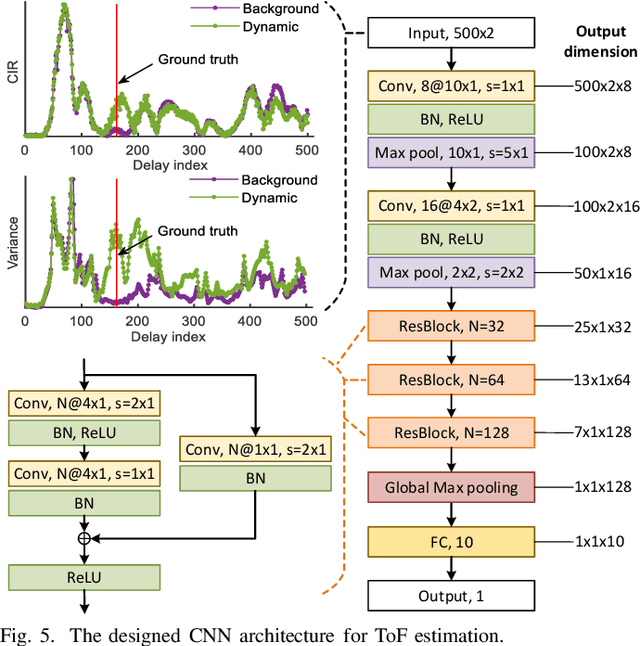
Due to its high delay resolution, the ultra-wideband (UWB) technique has been widely adopted for fine-grained indoor localization. Instead of active positioning, multi-static UWB radar-based passive human tracking is explored using commercial off-the-shelf (COTS) devices. To extract the time-of-flight (ToF) reflected by the moving person, channel impulse responses (CIR) and the corresponding variances are used to train the convolutional neural networks (CNN) model. Particle filter algorithm is adopted to track the moving person based on the extracted ToFs of all pairs of links. Experimental results show that the proposed CIR- and variance-based CNN models achieve 30.12-cm and 29.04-cm root-mean-square errors (RMSEs), respectively. Especially, the variance-based CNN model is robust to the scenario changing and promising for practical applications.
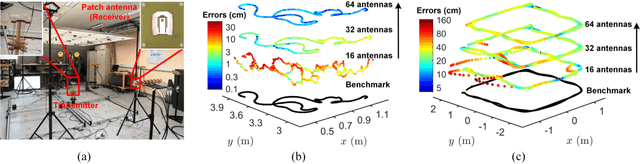
Towards Fine-Grained Indoor Localization based on Massive MIMO-OFDM System: Perspective of Multipath Components
Mar 30, 2021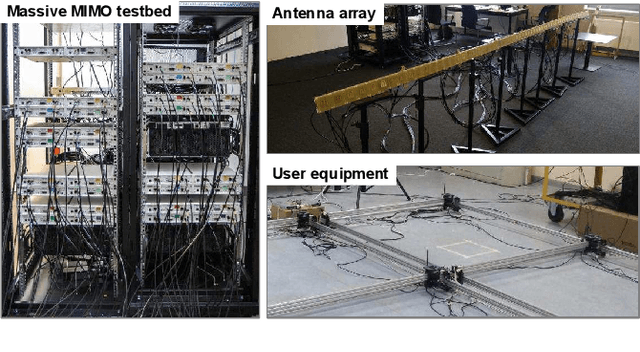
Fine-grained indoor localization has attracted attention recently because of the rapidly growing demand for indoor location-based services (ILBS). Specifically, massive (large-scale) multiple-input and multiple-output (MIMO) systems have received increasing attention due to high angular resolution. This paper presents an indoor localization testbed based on a massive MIMO orthogonal frequency-division multiplexing (OFDM) system, which supports physical-layer channel measurements. Instead of exploiting channel state information (CSI) directly for localization, we focus on positioning from the perspective of multipath components (MPCs), which are extracted from the CSI through the space-alternating generalized expectation-maximization (SAGE) algorithm. On top of the available MPCs, we propose a generalized fingerprinting system based on different single-metric and hybrid-metric schemes. We evaluate the impact of varying antenna topologies, feeding metrics, sizes of the training set, and fingerprinting methods. The experimental results show that the proposed fingerprinting method can achieve centimeter-level positioning accuracy with a relatively small training set. Specifically, the distributed uniform linear array obtains the highest accuracy with about 1.63-2.5-cm mean absolute errors resulting from the high spatial resolution.
An efficient genetic algorithm for large-scale planning of robust industrial wireless networks
Aug 12, 2017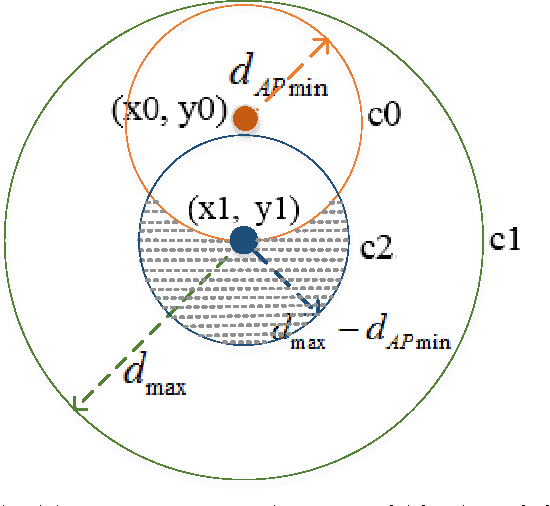
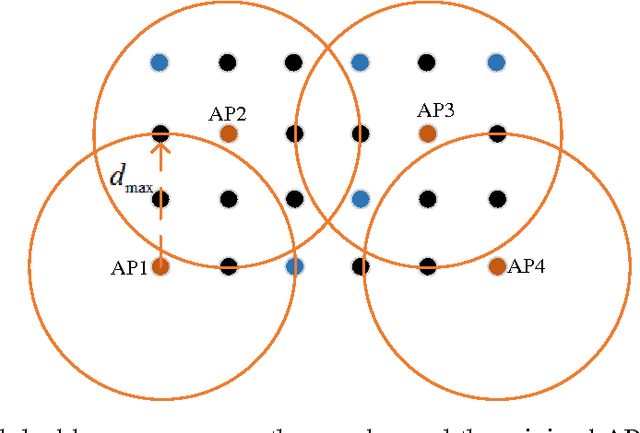
An industrial indoor environment is harsh for wireless communications compared to an office environment, because the prevalent metal easily causes shadowing effects and affects the availability of an industrial wireless local area network (IWLAN). On the one hand, it is costly, time-consuming, and ineffective to perform trial-and-error manual deployment of wireless nodes. On the other hand, the existing wireless planning tools only focus on office environments such that it is hard to plan IWLANs due to the larger problem size and the deployed IWLANs are vulnerable to prevalent shadowing effects in harsh industrial indoor environments. To fill this gap, this paper proposes an overdimensioning model and a genetic algorithm based over-dimensioning (GAOD) algorithm for deploying large-scale robust IWLANs. As a progress beyond the state-of-the-art wireless planning, two full coverage layers are created. The second coverage layer serves as redundancy in case of shadowing. Meanwhile, the deployment cost is reduced by minimizing the number of access points (APs); the hard constraint of minimal inter-AP spatial paration avoids multiple APs covering the same area to be simultaneously shadowed by the same obstacle. The computation time and occupied memory are dedicatedly considered in the design of GAOD for large-scale optimization. A greedy heuristic based over-dimensioning (GHOD) algorithm and a random OD algorithm are taken as benchmarks. In two vehicle manufacturers with a small and large indoor environment, GAOD outperformed GHOD with up to 20% less APs, while GHOD outputted up to 25% less APs than a random OD algorithm. Furthermore, the effectiveness of this model and GAOD was experimentally validated with a real deployment system.
An efficient genetic algorithm for large-scale transmit power control of dense industrial wireless networks
Aug 12, 2017
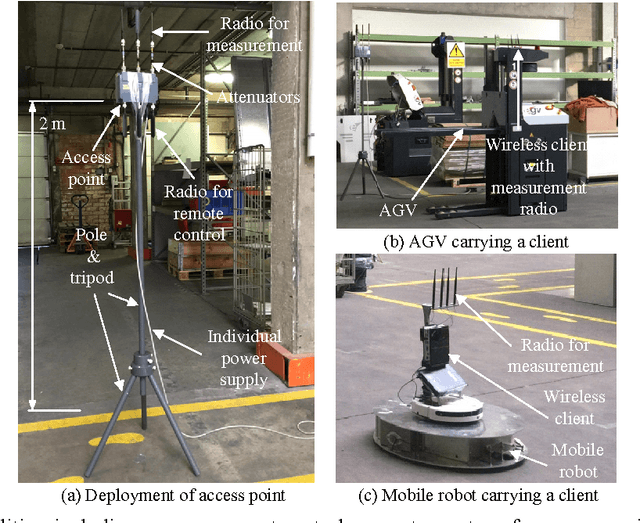

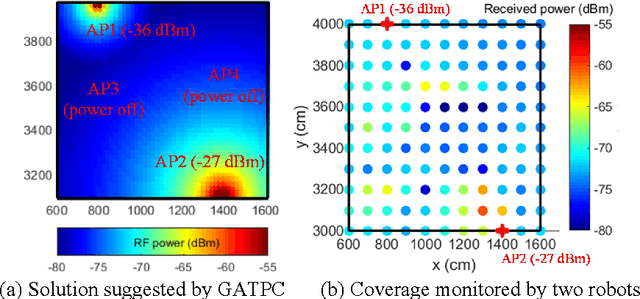
The industrial wireless local area network (IWLAN) is increasingly dense, not only due to the penetration of wireless applications into factories and warehouses, but also because of the rising need of redundancy for robust wireless coverage. Instead of powering on all the nodes with the maximal transmit power, it becomes an unavoidable challenge to control the transmit power of all wireless nodes on a large scale, in order to reduce interference and adapt coverage to the latest shadowing effects in the environment. Therefore, this paper proposes an efficient genetic algorithm (GA) to solve this transmit power control (TPC) problem for dense IWLANs, named GATPC. Effective population initialization, crossover and mutation, parallel computing as well as dedicated speedup measures are introduced to tailor GATPC for the large-scale optimization that is intrinsically involved in this problem. In contrast to most coverage-related optimization algorithms which cannot deal with the prevalent shadowing effects in harsh industrial indoor environments, an empirical one-slope path loss model considering three-dimensional obstacle shadowing effects is used in GATPC, in order to enable accurate yet simple coverage prediction. Experimental validation and numerical experiments in real industrial cases show the promising performance of GATPC in terms of scalability to a hyper-large scale, up to 37-times speedup in resolution runtime, and solution quality to achieve adaptive coverage and to minimize interference.