 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLightweight Foundation Model for Wireless Time Series Downstream Tasks on Edge Devices
Nov 18, 2025



While machine learning is widely used to optimize wireless networks, training a separate model for each task in communication and localization is becoming increasingly unsustainable due to the significant costs associated with training and deployment. Foundation models offer a more scalable alternative by enabling a single model to be adapted across multiple tasks through fine-tuning with limited samples. However, current foundation models mostly rely on large-scale Transformer architectures, resulting in computationally intensive models unsuitable for deployment on typical edge devices. This paper presents a lightweight foundation model based on simple Multi-Layer-Perceptron (MLP) encoders that independently process input patches. Our model supports 4 types of downstream tasks (long-range technology recognition, short-range technology recognition, modulation recognition and line-of-sight-detection) from multiple input types (IQ and CIR) and different sampling rates. We show that, unlike Transformers, which can exhibit performance drops as downstream tasks are added, our MLP model maintains robust generalization performance, achieving over 97% accurate fine-tuning results for previously unseen data classes. These results are achieved despite having only 21K trainable parameters, allowing an inference time of 0.33 ms on common edge devices, making the model suitable for constrained real-time deployments.
Foundation Model for Wireless Technology Recognition Using IQ Timeseries
May 26, 2025Wireless Technology Recognition (WTR) is essential in modern communication systems, enabling efficient spectrum management and the seamless coexistence of diverse technologies. In real-world conditions, WTR solutions should be able to handle signals from various resources with different sampling rates, capturing devices, and frequency bands. However, traditional WTR methods, which rely on energy detection, Convolutional Neural Network (CNN) models, or Deep Learning (DL), lack the robustness and adaptability required to generalize across unseen environments, different sampling devices, and previously unencountered signal classes. In this work, we introduce a Transformer-based foundation model for WTR, trained in an unsupervised manner on large-scale, unlabeled wireless signal datasets. Foundation models are designed to learn general-purpose representations that transfer effectively across tasks and domains, allowing generalization towards new technologies and WTR sampling devices. Our approach leverages input patching for computational efficiency and incorporates a two-stage training pipeline: unsupervised pre-training followed by lightweight fine-tuning. This enables the model to generalize to new wireless technologies and environments using only a small number of labeled samples. Experimental results demonstrate that our model achieves superior accuracy across varying sampling rates and frequency bands while maintaining low computational complexity, supporting the vision of a reusable wireless foundation model adaptable to new technologies with minimal retraining.
Large-Scale AI in Telecom: Charting the Roadmap for Innovation, Scalability, and Enhanced Digital Experiences
Mar 06, 2025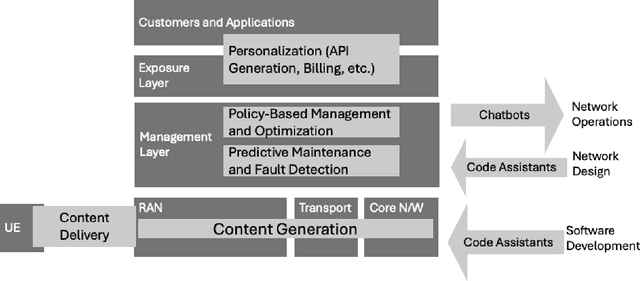
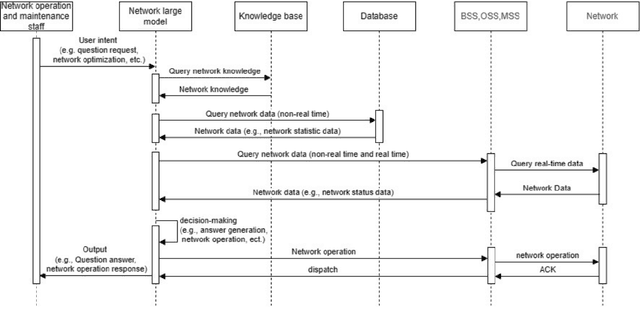
This white paper discusses the role of large-scale AI in the telecommunications industry, with a specific focus on the potential of generative AI to revolutionize network functions and user experiences, especially in the context of 6G systems. It highlights the development and deployment of Large Telecom Models (LTMs), which are tailored AI models designed to address the complex challenges faced by modern telecom networks. The paper covers a wide range of topics, from the architecture and deployment strategies of LTMs to their applications in network management, resource allocation, and optimization. It also explores the regulatory, ethical, and standardization considerations for LTMs, offering insights into their future integration into telecom infrastructure. The goal is to provide a comprehensive roadmap for the adoption of LTMs to enhance scalability, performance, and user-centric innovation in telecom networks.
Bluetooth Low Energy Dataset Using In-Phase and Quadrature Samples for Indoor Localization
Dec 02, 2024



One significant challenge in research is to collect a large amount of data and learn the underlying relationship between the input and the output variables. This paper outlines the process of collecting and validating a dataset designed to determine the angle of arrival (AoA) using Bluetooth low energy (BLE) technology. The data, collected in a laboratory setting, is intended to approximate real-world industrial scenarios. This paper discusses the data collection process, the structure of the dataset, and the methodology adopted for automating sample labeling for supervised learning. The collected samples and the process of generating ground truth (GT) labels were validated using the Texas Instruments (TI) phase difference of arrival (PDoA) implementation on the data, yielding a mean absolute error (MAE) at one of the heights without obstacles of $25.71^\circ$. The distance estimation on BLE was implemented using a Gaussian Process Regression algorithm, yielding an MAE of $0.174$m.
A Comprehensive Overview on UWB Radar: Applications, Standards, Signal Processing Techniques, Datasets, Radio Chips, Trends and Future Research Directions
Feb 08, 2024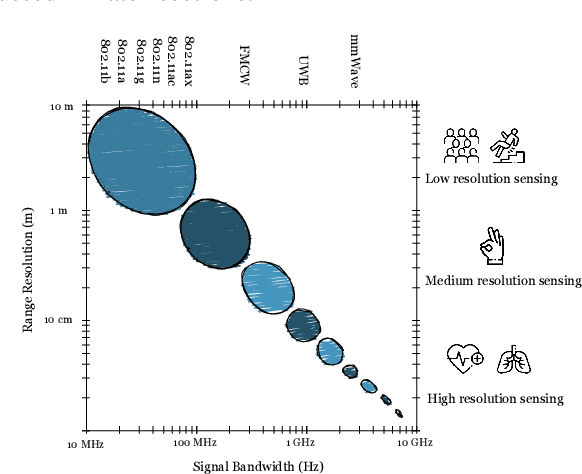
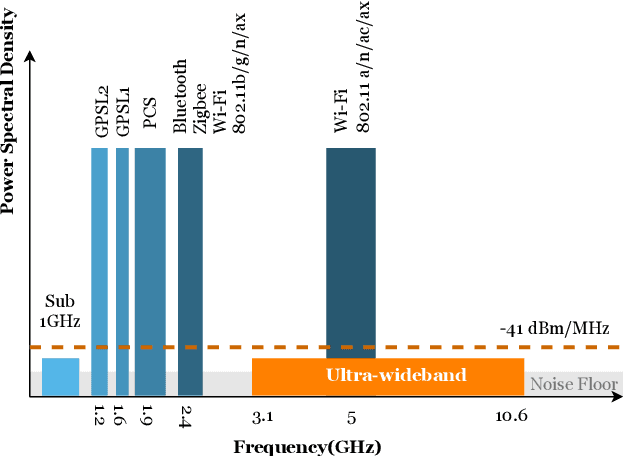
Due to their large bandwidth, relatively low cost, and robust performance, UWB radio chips can be used for a wide variety of applications, including localization, communication, and radar. This article offers an exhaustive survey of recent progress in UWB radar technology. The goal of this survey is to provide a comprehensive view of the technical fundamentals and emerging trends in UWB radar. Our analysis is categorized into multiple parts. Firstly, we explore the fundamental concepts of UWB radar technology from a technology and standardization point of view. Secondly, we examine the most relevant UWB applications and use cases, such as device-free localization, activity recognition, presence detection, and vital sign monitoring, discussing each time the bandwidth requirements, processing techniques, algorithms, latest developments, relevant example papers, and trends. Next, we steer readers toward relevant datasets and available radio chipsets. Finally, we discuss ongoing challenges and potential future research avenues. As such, this overview paper is designed to be a cornerstone reference for researchers charting the course of UWB radar technology over the last decade.
Feature-Based Generalized Gaussian Distribution Method for NLoS Detection in Ultra-Wideband (UWB) Indoor Positioning System
Apr 14, 2023Non-Line-of-Sight (NLoS) propagation condition is a crucial factor affecting the precision of the localization in the Ultra-Wideband (UWB) Indoor Positioning System (IPS). Numerous supervised Machine Learning (ML) approaches have been applied for NLoS identification to improve the accuracy of the IPS. However, it is difficult for existing ML approaches to maintain a high classification accuracy when the database contains a small number of NLoS signals and a large number of Line-of-Sight (LoS) signals. The inaccurate localization of the target node caused by this small number of NLoS signals can still be problematic. To solve this issue, we propose feature-based Gaussian Distribution (GD) and Generalized Gaussian Distribution (GGD) NLoS detection algorithms. By employing our detection algorithm for the imbalanced dataset, a classification accuracy of $96.7\%$ and $98.0\%$ can be achieved. We also compared the proposed algorithm with the existing cutting-edge such as Support-Vector-Machine (SVM), Decision Tree (DT), Naive Bayes (NB), and Neural Network (NN), which can achieve an accuracy of $92.6\%$, $92.8\%$, $93.2\%$, and $95.5\%$, respectively. The results demonstrate that the GGD algorithm can achieve high classification accuracy with the imbalanced dataset. Finally, the proposed algorithm can also achieve a higher classification accuracy for different ratios of LoS and NLoS signals which proves the robustness and effectiveness of the proposed method.
Multi-Static UWB Radar-based Passive Human Tracking Using COTS Devices
Sep 27, 2021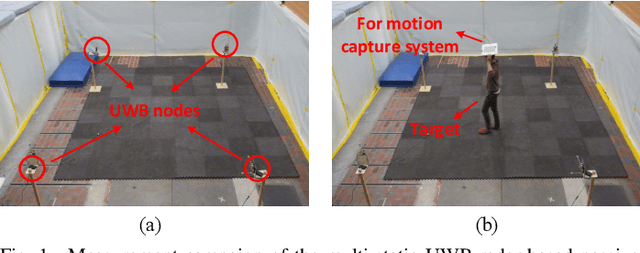
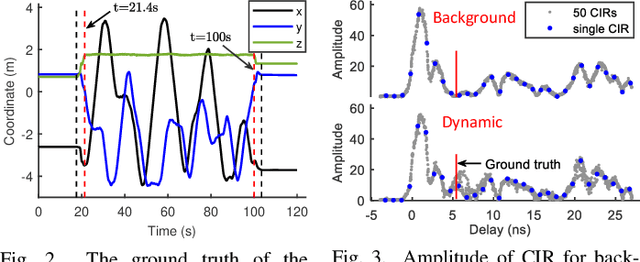
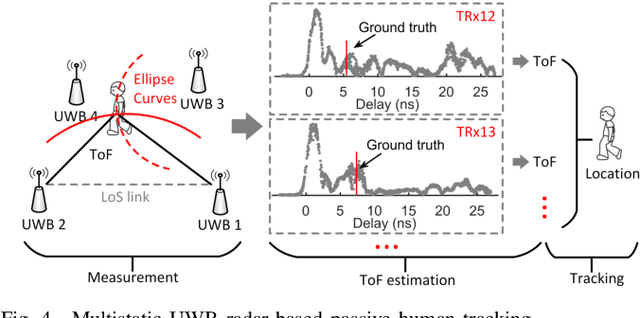
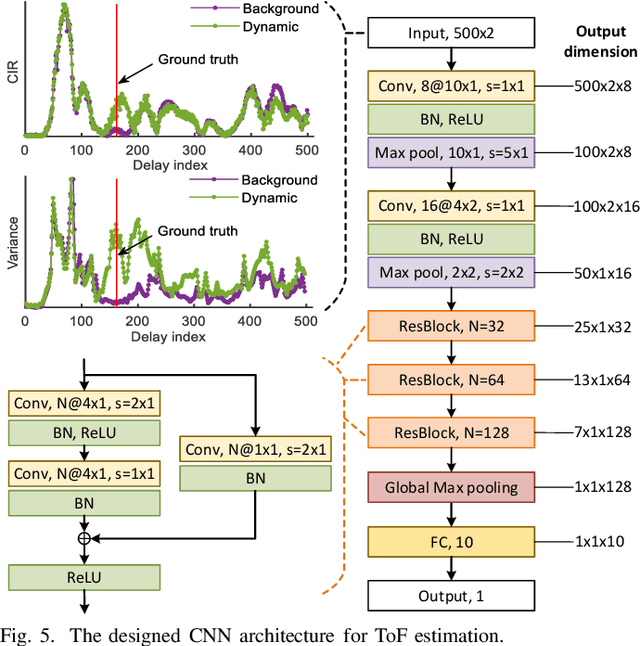
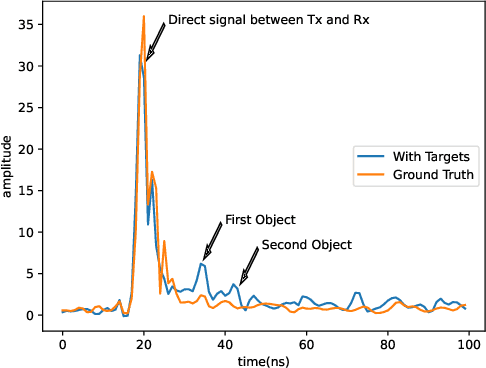
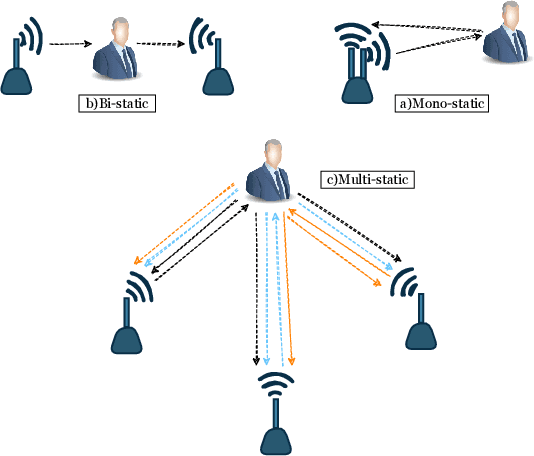
Due to its high delay resolution, the ultra-wideband (UWB) technique has been widely adopted for fine-grained indoor localization. Instead of active positioning, multi-static UWB radar-based passive human tracking is explored using commercial off-the-shelf (COTS) devices. To extract the time-of-flight (ToF) reflected by the moving person, channel impulse responses (CIR) and the corresponding variances are used to train the convolutional neural networks (CNN) model. Particle filter algorithm is adopted to track the moving person based on the extracted ToFs of all pairs of links. Experimental results show that the proposed CIR- and variance-based CNN models achieve 30.12-cm and 29.04-cm root-mean-square errors (RMSEs), respectively. Especially, the variance-based CNN model is robust to the scenario changing and promising for practical applications.