 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBluetooth Low Energy Dataset Using In-Phase and Quadrature Samples for Indoor Localization
Dec 02, 2024



One significant challenge in research is to collect a large amount of data and learn the underlying relationship between the input and the output variables. This paper outlines the process of collecting and validating a dataset designed to determine the angle of arrival (AoA) using Bluetooth low energy (BLE) technology. The data, collected in a laboratory setting, is intended to approximate real-world industrial scenarios. This paper discusses the data collection process, the structure of the dataset, and the methodology adopted for automating sample labeling for supervised learning. The collected samples and the process of generating ground truth (GT) labels were validated using the Texas Instruments (TI) phase difference of arrival (PDoA) implementation on the data, yielding a mean absolute error (MAE) at one of the heights without obstacles of $25.71^\circ$. The distance estimation on BLE was implemented using a Gaussian Process Regression algorithm, yielding an MAE of $0.174$m.
Error Mitigation for TDoA UWB Indoor Localization using Unsupervised Machine Learning
Apr 10, 2024Indoor positioning systems based on Ultra-wideband (UWB) technology are gaining recognition for their ability to provide cm-level localization accuracy. However, these systems often encounter challenges caused by dense multi-path fading, leading to positioning errors. To address this issue, in this letter, we propose a novel methodology for unsupervised anchor node selection using deep embedded clustering (DEC). Our approach uses an Auto Encoder (AE) before clustering, thereby better separating UWB features into separable clusters of UWB input signals. We furthermore investigate how to rank these clusters based on their cluster quality, allowing us to remove untrustworthy signals. Experimental results show the efficiency of our proposed method, demonstrating a significant 23.1% reduction in mean absolute error (MAE) compared to without anchor exclusion. Especially in the dense multi-path area, our algorithm achieves even more significant enhancements, reducing the MAE by 26.6% and the 95th percentile error by 49.3% compared to without anchor exclusion.
Removing the need for ground truth UWB data collection: self-supervised ranging error correction using deep reinforcement learning
Mar 28, 2024Indoor positioning using UWB technology has gained interest due to its centimeter-level accuracy potential. However, multipath effects and non-line-of-sight conditions cause ranging errors between anchors and tags. Existing approaches for mitigating these ranging errors rely on collecting large labeled datasets, making them impractical for real-world deployments. This paper proposes a novel self-supervised deep reinforcement learning approach that does not require labeled ground truth data. A reinforcement learning agent uses the channel impulse response as a state and predicts corrections to minimize the error between corrected and estimated ranges. The agent learns, self-supervised, by iteratively improving corrections that are generated by combining the predictability of trajectories with filtering and smoothening. Experiments on real-world UWB measurements demonstrate comparable performance to state-of-the-art supervised methods, overcoming data dependency and lack of generalizability limitations. This makes self-supervised deep reinforcement learning a promising solution for practical and scalable UWB-ranging error correction.
A Comprehensive Overview on UWB Radar: Applications, Standards, Signal Processing Techniques, Datasets, Radio Chips, Trends and Future Research Directions
Feb 08, 2024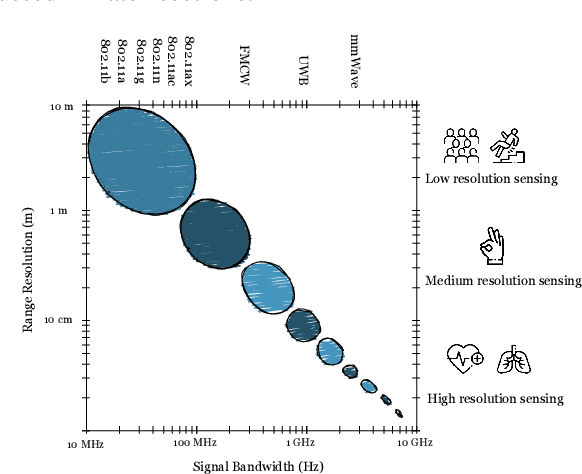
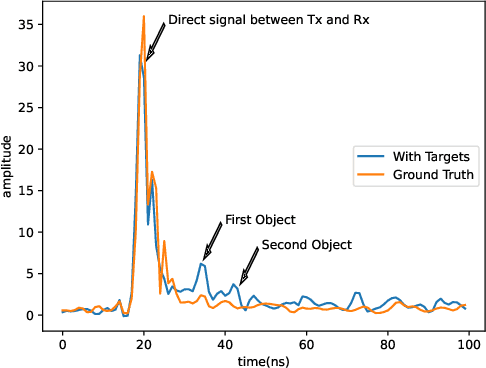
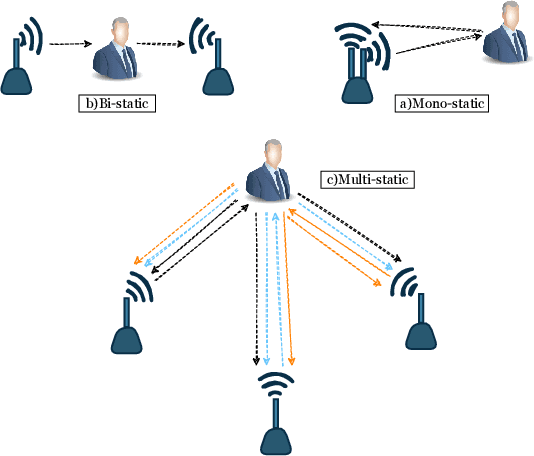
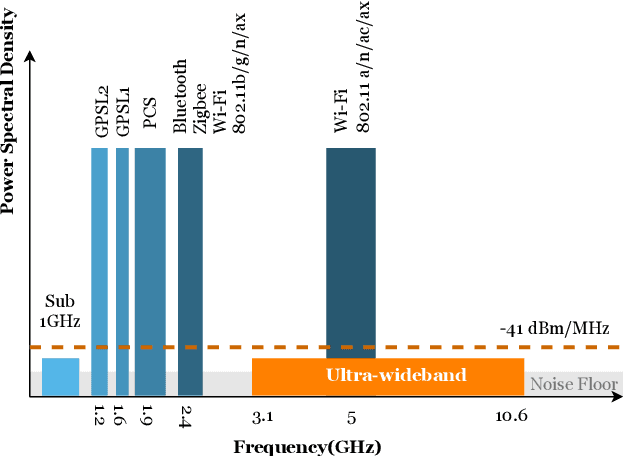
Due to their large bandwidth, relatively low cost, and robust performance, UWB radio chips can be used for a wide variety of applications, including localization, communication, and radar. This article offers an exhaustive survey of recent progress in UWB radar technology. The goal of this survey is to provide a comprehensive view of the technical fundamentals and emerging trends in UWB radar. Our analysis is categorized into multiple parts. Firstly, we explore the fundamental concepts of UWB radar technology from a technology and standardization point of view. Secondly, we examine the most relevant UWB applications and use cases, such as device-free localization, activity recognition, presence detection, and vital sign monitoring, discussing each time the bandwidth requirements, processing techniques, algorithms, latest developments, relevant example papers, and trends. Next, we steer readers toward relevant datasets and available radio chipsets. Finally, we discuss ongoing challenges and potential future research avenues. As such, this overview paper is designed to be a cornerstone reference for researchers charting the course of UWB radar technology over the last decade.
Feature-Based Generalized Gaussian Distribution Method for NLoS Detection in Ultra-Wideband (UWB) Indoor Positioning System
Apr 14, 2023Non-Line-of-Sight (NLoS) propagation condition is a crucial factor affecting the precision of the localization in the Ultra-Wideband (UWB) Indoor Positioning System (IPS). Numerous supervised Machine Learning (ML) approaches have been applied for NLoS identification to improve the accuracy of the IPS. However, it is difficult for existing ML approaches to maintain a high classification accuracy when the database contains a small number of NLoS signals and a large number of Line-of-Sight (LoS) signals. The inaccurate localization of the target node caused by this small number of NLoS signals can still be problematic. To solve this issue, we propose feature-based Gaussian Distribution (GD) and Generalized Gaussian Distribution (GGD) NLoS detection algorithms. By employing our detection algorithm for the imbalanced dataset, a classification accuracy of $96.7\%$ and $98.0\%$ can be achieved. We also compared the proposed algorithm with the existing cutting-edge such as Support-Vector-Machine (SVM), Decision Tree (DT), Naive Bayes (NB), and Neural Network (NN), which can achieve an accuracy of $92.6\%$, $92.8\%$, $93.2\%$, and $95.5\%$, respectively. The results demonstrate that the GGD algorithm can achieve high classification accuracy with the imbalanced dataset. Finally, the proposed algorithm can also achieve a higher classification accuracy for different ratios of LoS and NLoS signals which proves the robustness and effectiveness of the proposed method.