 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBluetooth Low Energy Dataset Using In-Phase and Quadrature Samples for Indoor Localization
Dec 02, 2024



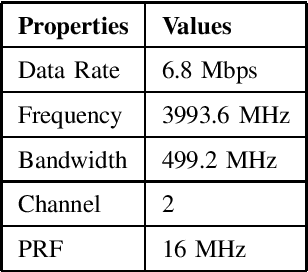
One significant challenge in research is to collect a large amount of data and learn the underlying relationship between the input and the output variables. This paper outlines the process of collecting and validating a dataset designed to determine the angle of arrival (AoA) using Bluetooth low energy (BLE) technology. The data, collected in a laboratory setting, is intended to approximate real-world industrial scenarios. This paper discusses the data collection process, the structure of the dataset, and the methodology adopted for automating sample labeling for supervised learning. The collected samples and the process of generating ground truth (GT) labels were validated using the Texas Instruments (TI) phase difference of arrival (PDoA) implementation on the data, yielding a mean absolute error (MAE) at one of the heights without obstacles of $25.71^\circ$. The distance estimation on BLE was implemented using a Gaussian Process Regression algorithm, yielding an MAE of $0.174$m.
Feature-Based Generalized Gaussian Distribution Method for NLoS Detection in Ultra-Wideband (UWB) Indoor Positioning System
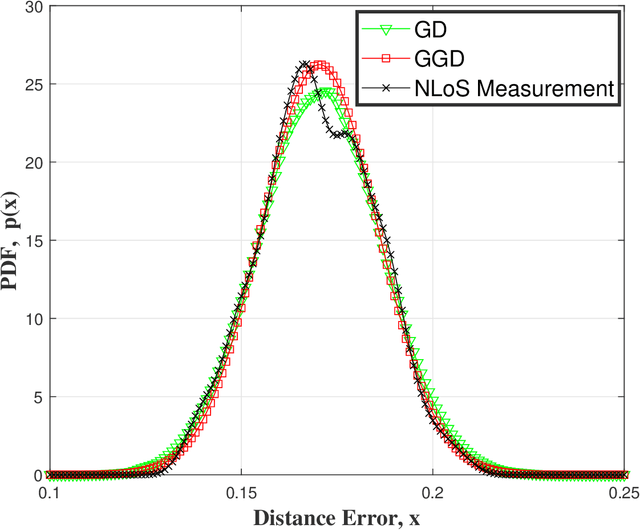
Apr 14, 2023Non-Line-of-Sight (NLoS) propagation condition is a crucial factor affecting the precision of the localization in the Ultra-Wideband (UWB) Indoor Positioning System (IPS). Numerous supervised Machine Learning (ML) approaches have been applied for NLoS identification to improve the accuracy of the IPS. However, it is difficult for existing ML approaches to maintain a high classification accuracy when the database contains a small number of NLoS signals and a large number of Line-of-Sight (LoS) signals. The inaccurate localization of the target node caused by this small number of NLoS signals can still be problematic. To solve this issue, we propose feature-based Gaussian Distribution (GD) and Generalized Gaussian Distribution (GGD) NLoS detection algorithms. By employing our detection algorithm for the imbalanced dataset, a classification accuracy of $96.7\%$ and $98.0\%$ can be achieved. We also compared the proposed algorithm with the existing cutting-edge such as Support-Vector-Machine (SVM), Decision Tree (DT), Naive Bayes (NB), and Neural Network (NN), which can achieve an accuracy of $92.6\%$, $92.8\%$, $93.2\%$, and $95.5\%$, respectively. The results demonstrate that the GGD algorithm can achieve high classification accuracy with the imbalanced dataset. Finally, the proposed algorithm can also achieve a higher classification accuracy for different ratios of LoS and NLoS signals which proves the robustness and effectiveness of the proposed method.
Single Carrier Frequency Domain Detectors for Internet of Underwater Things
Mar 18, 2022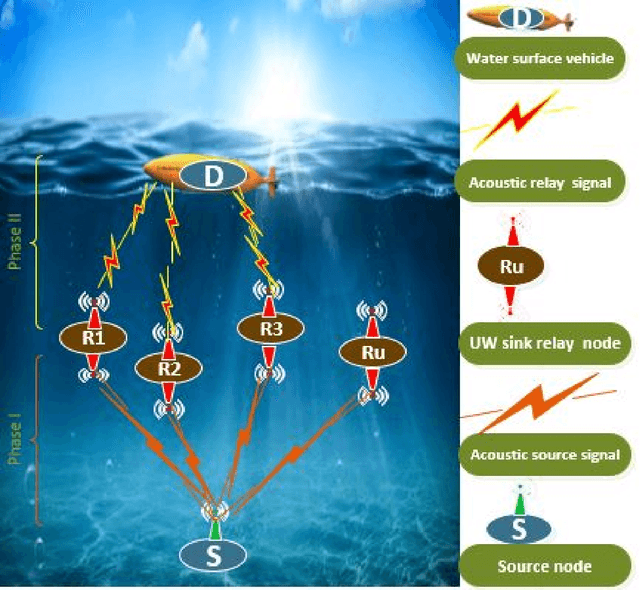

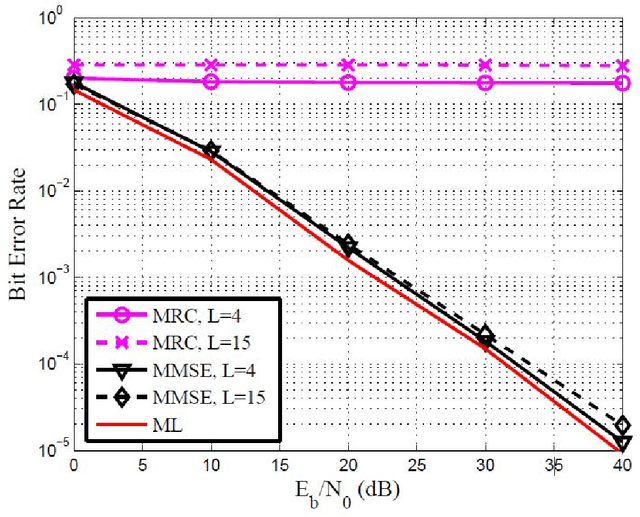
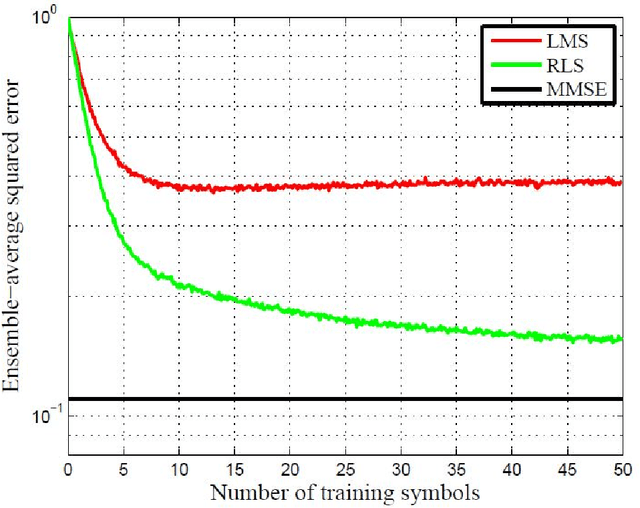
This paper proposes low complexity detection for internet of underwater things (IoUT)s communication. The signal is transmitted from the source to the destination using several sensors. To simplify the computational operations at the transmitter and the sensory nodes, a single carrier frequency domain equalizer (SC-FDE) is proposed and amplify-and-forward (AF) protocols are employed. Fast Fourier transform (FFT) and use of cyclic prefix (CP) are also proposed to simplify these algorithms when compared to time-domain equalization. As precise channel data is difficult to capture in underwater communications, the adaptive implementation of FDE is proposed as a solution that can be employed when the channel experiences a fast doppler shift. The two adaptive detectors are based on the least mean-square (LMS) and recursive least square (RLS) principles. Numerical simulations show that the performance of the bit error rate (BER) performance of the proposed detectors is close to that of the ideal minimum mean square error (MMSE).
Anomaly Detection Based on Generalized Gaussian Distribution approach for Ultra-Wideband (UWB) Indoor Positioning System
Aug 09, 2021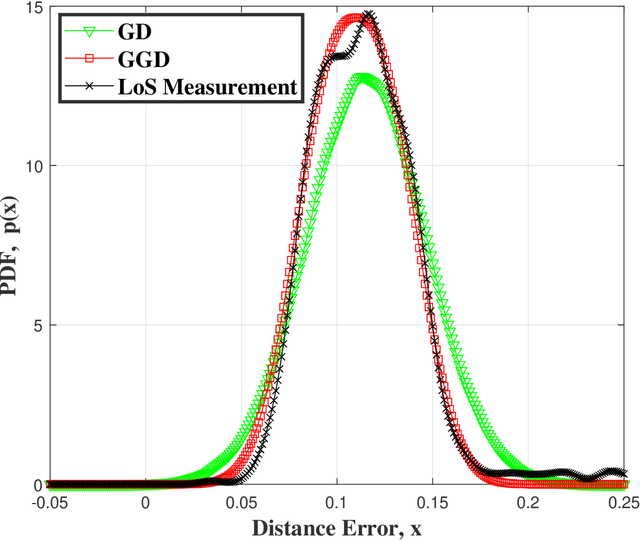
With the rapid development of the Internet of Things (IoT), Indoor Positioning System (IPS) has attracted significant interest in academic research. Ultra-Wideband (UWB) is an emerging technology that can be employed for IPS as it offers centimetre-level accuracy. However, the UWB system still faces several technical challenges in practice, one of which is Non-Line-of-Sight (NLoS) signal propagation. Several machine learning approaches have been applied for the NLoS component identification. However, when the data contains a very small amount of NLoS components it becomes very difficult for existing algorithms to classify them. This paper focuses on employing an anomaly detection approach based on Gaussian Distribution (GD) and Generalized Gaussian Distribution (GGD) algorithms to detect and identify the NLoS components. The simulation results indicate that the proposed approach can provide a robust NLoS component identification which improves the NLoS signal classification accuracy which results in significant improvement in the UWB positioning system.