 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecoupling Contact for Fine-Grained Motion Style Transfer
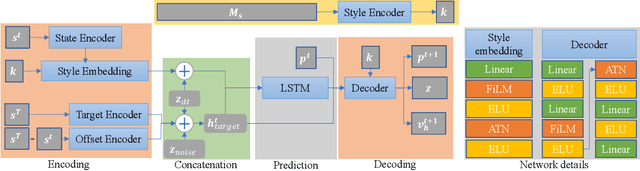
Sep 09, 2024Motion style transfer changes the style of a motion while retaining its content and is useful in computer animations and games. Contact is an essential component of motion style transfer that should be controlled explicitly in order to express the style vividly while enhancing motion naturalness and quality. However, it is unknown how to decouple and control contact to achieve fine-grained control in motion style transfer. In this paper, we present a novel style transfer method for fine-grained control over contacts while achieving both motion naturalness and spatial-temporal variations of style. Based on our empirical evidence, we propose controlling contact indirectly through the hip velocity, which can be further decomposed into the trajectory and contact timing, respectively. To this end, we propose a new model that explicitly models the correlations between motions and trajectory/contact timing/style, allowing us to decouple and control each separately. Our approach is built around a motion manifold, where hip controls can be easily integrated into a Transformer-based decoder. It is versatile in that it can generate motions directly as well as be used as post-processing for existing methods to improve quality and contact controllability. In addition, we propose a new metric that measures a correlation pattern of motions based on our empirical evidence, aligning well with human perception in terms of motion naturalness. Based on extensive evaluation, our method outperforms existing methods in terms of style expressivity and motion quality.
RSMT: Real-time Stylized Motion Transition for Characters
Jun 21, 2023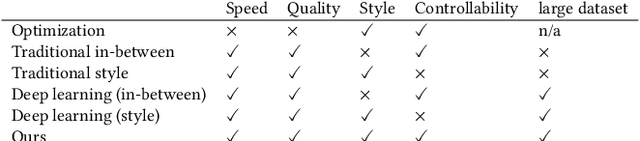
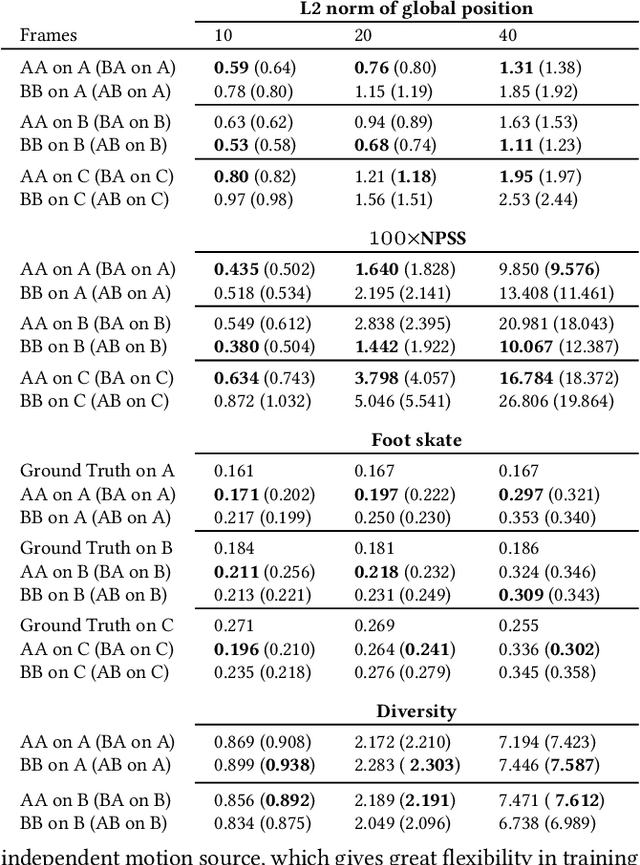
Styled online in-between motion generation has important application scenarios in computer animation and games. Its core challenge lies in the need to satisfy four critical requirements simultaneously: generation speed, motion quality, style diversity, and synthesis controllability. While the first two challenges demand a delicate balance between simple fast models and learning capacity for generation quality, the latter two are rarely investigated together in existing methods, which largely focus on either control without style or uncontrolled stylized motions. To this end, we propose a Real-time Stylized Motion Transition method (RSMT) to achieve all aforementioned goals. Our method consists of two critical, independent components: a general motion manifold model and a style motion sampler. The former acts as a high-quality motion source and the latter synthesizes styled motions on the fly under control signals. Since both components can be trained separately on different datasets, our method provides great flexibility, requires less data, and generalizes well when no/few samples are available for unseen styles. Through exhaustive evaluation, our method proves to be fast, high-quality, versatile, and controllable. The code and data are available at {https://github.com/yuyujunjun/RSMT-Realtime-Stylized-Motion-Transition.}
Real-time Controllable Motion Transition for Characters
May 05, 2022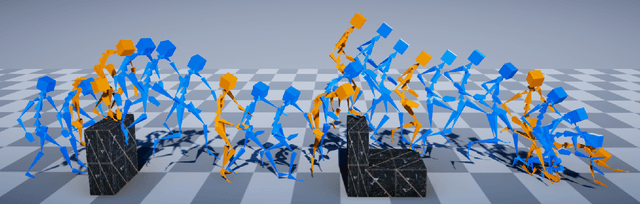
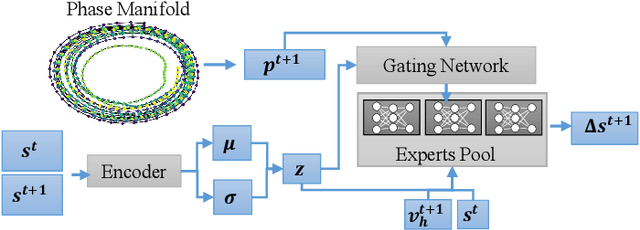
Real-time in-between motion generation is universally required in games and highly desirable in existing animation pipelines. Its core challenge lies in the need to satisfy three critical conditions simultaneously: quality, controllability and speed, which renders any methods that need offline computation (or post-processing) or cannot incorporate (often unpredictable) user control undesirable. To this end, we propose a new real-time transition method to address the aforementioned challenges. Our approach consists of two key components: motion manifold and conditional transitioning. The former learns the important low-level motion features and their dynamics; while the latter synthesizes transitions conditioned on a target frame and the desired transition duration. We first learn a motion manifold that explicitly models the intrinsic transition stochasticity in human motions via a multi-modal mapping mechanism. Then, during generation, we design a transition model which is essentially a sampling strategy to sample from the learned manifold, based on the target frame and the aimed transition duration. We validate our method on different datasets in tasks where no post-processing or offline computation is allowed. Through exhaustive evaluation and comparison, we show that our method is able to generate high-quality motions measured under multiple metrics. Our method is also robust under various target frames (with extreme cases).
An efficient genetic algorithm for large-scale planning of robust industrial wireless networks
Aug 12, 2017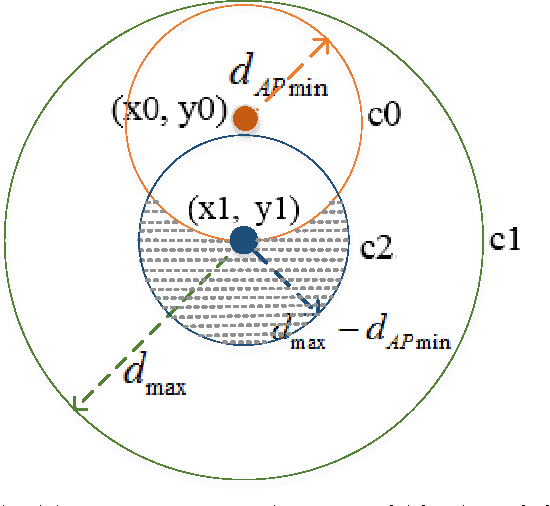
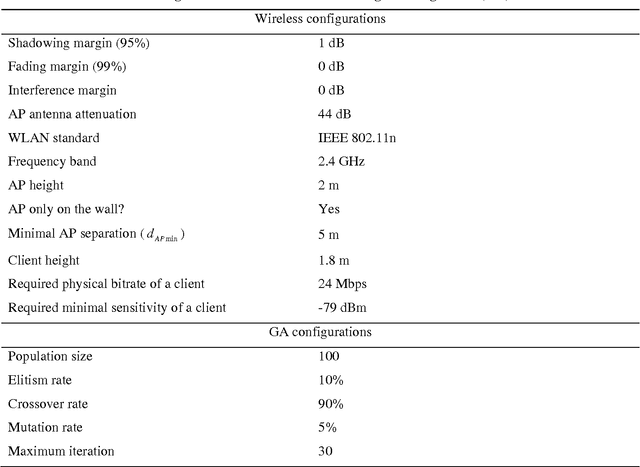
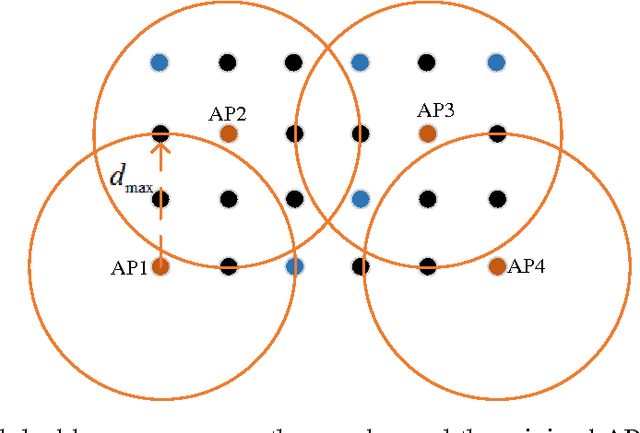
An industrial indoor environment is harsh for wireless communications compared to an office environment, because the prevalent metal easily causes shadowing effects and affects the availability of an industrial wireless local area network (IWLAN). On the one hand, it is costly, time-consuming, and ineffective to perform trial-and-error manual deployment of wireless nodes. On the other hand, the existing wireless planning tools only focus on office environments such that it is hard to plan IWLANs due to the larger problem size and the deployed IWLANs are vulnerable to prevalent shadowing effects in harsh industrial indoor environments. To fill this gap, this paper proposes an overdimensioning model and a genetic algorithm based over-dimensioning (GAOD) algorithm for deploying large-scale robust IWLANs. As a progress beyond the state-of-the-art wireless planning, two full coverage layers are created. The second coverage layer serves as redundancy in case of shadowing. Meanwhile, the deployment cost is reduced by minimizing the number of access points (APs); the hard constraint of minimal inter-AP spatial paration avoids multiple APs covering the same area to be simultaneously shadowed by the same obstacle. The computation time and occupied memory are dedicatedly considered in the design of GAOD for large-scale optimization. A greedy heuristic based over-dimensioning (GHOD) algorithm and a random OD algorithm are taken as benchmarks. In two vehicle manufacturers with a small and large indoor environment, GAOD outperformed GHOD with up to 20% less APs, while GHOD outputted up to 25% less APs than a random OD algorithm. Furthermore, the effectiveness of this model and GAOD was experimentally validated with a real deployment system.
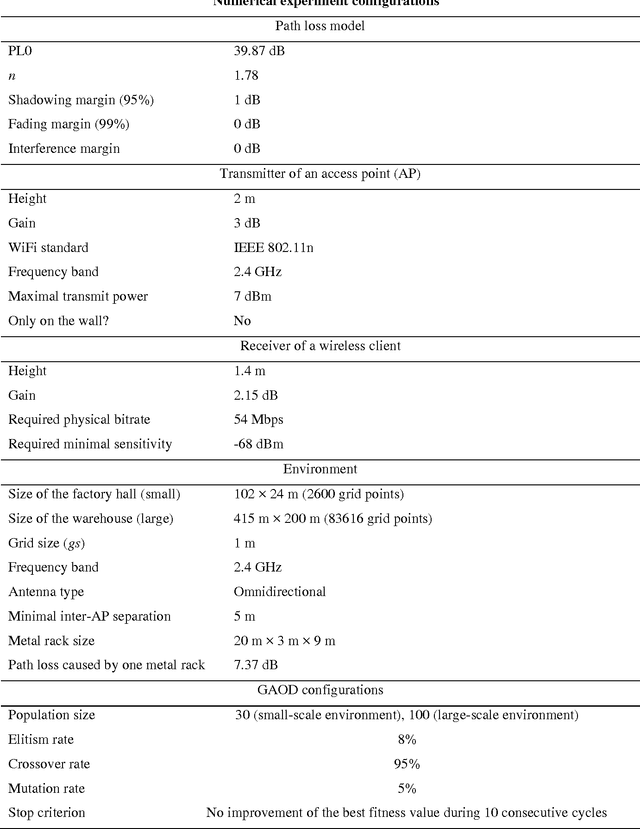
An efficient genetic algorithm for large-scale transmit power control of dense industrial wireless networks
Aug 12, 2017
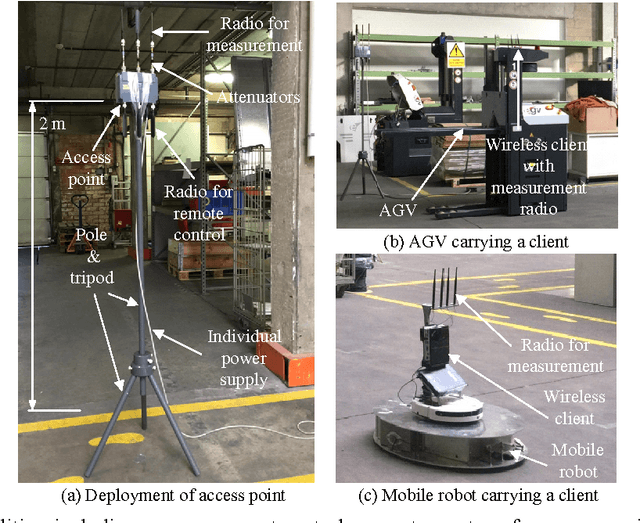

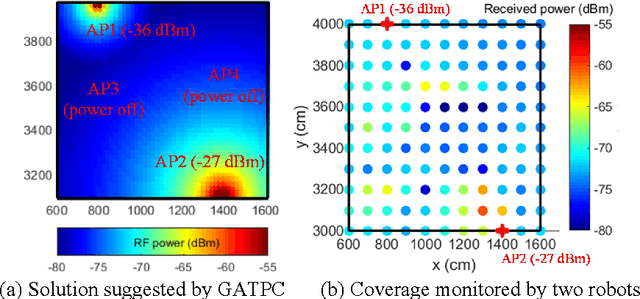
The industrial wireless local area network (IWLAN) is increasingly dense, not only due to the penetration of wireless applications into factories and warehouses, but also because of the rising need of redundancy for robust wireless coverage. Instead of powering on all the nodes with the maximal transmit power, it becomes an unavoidable challenge to control the transmit power of all wireless nodes on a large scale, in order to reduce interference and adapt coverage to the latest shadowing effects in the environment. Therefore, this paper proposes an efficient genetic algorithm (GA) to solve this transmit power control (TPC) problem for dense IWLANs, named GATPC. Effective population initialization, crossover and mutation, parallel computing as well as dedicated speedup measures are introduced to tailor GATPC for the large-scale optimization that is intrinsically involved in this problem. In contrast to most coverage-related optimization algorithms which cannot deal with the prevalent shadowing effects in harsh industrial indoor environments, an empirical one-slope path loss model considering three-dimensional obstacle shadowing effects is used in GATPC, in order to enable accurate yet simple coverage prediction. Experimental validation and numerical experiments in real industrial cases show the promising performance of GATPC in terms of scalability to a hyper-large scale, up to 37-times speedup in resolution runtime, and solution quality to achieve adaptive coverage and to minimize interference.