 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Many RF Chains Does a Microwave Linear Analog Computer (MiLAC) Need to Match the Fully-Digital Cramér-Rao Bound?
Jun 22, 2026A microwave linear analog computer (MiLAC) is a tunable microwave network that performs linear operations directly on radio-frequency signals through wave propagation. Used as an antenna-array front end, it can map many antenna signals to a small number of active RF chains. While lossless reciprocal MiLACs have been shown to provide flexible or capacity-achieving beamforming for wireless communications, their sensing performance remains largely unexplored. We analyze direction-of-arrival estimation for $K$ far-field targets using a tunable receive-side lossless reciprocal MiLAC combiner. We show that the Fisher information matrix depends on the combiner only through the orthogonal projector onto its row space and never exceeds that of a fully digital receiver. Equality holds when the row space contains the $2K$-dimensional joint steering--derivative subspace, establishing a zero-gap threshold of two RF chains per target. A dimension-counting argument lower-bounds the number of tunable components required to achieve the digital Cramér--Rao bound for every target configuration. The stem-connected MiLAC attains this bound asymptotically, up to an antenna-count-independent additive overhead, while scaling linearly with the antenna and target counts. Unlike a phase-shifter front end with the same number of RF chains, MiLAC can exactly attain the fully digital bound. Numerical results validate the analysis.
Beamforming Design for Stem-Connected Microwave Linear Analog Computer (MiLAC)-Aided Multiuser MISO Downlinks
Jun 12, 2026A microwave linear analog computer (MiLAC) is a tunable microwave network that performs computation through wave propagation in the analog domain. In beamforming, data streams pass through a reconfigurable admittance network and emerge as antenna signals. For communications, MiLACs are preferably lossless and reciprocal to avoid power dissipation and non-reciprocal components, but these constraints limit the analog beamformers they can realize. Fully-connected MiLACs offer broad flexibility at the cost of a quadratic number of tunable admittances in the antenna count. Stem-connected MiLACs reduce this scaling to linear and preserve point-to-point capacity, but their role in multiuser downlink beamforming and under bounded, discrete hardware constraints has remained open. This paper addresses both questions for the multiuser multiple-input single-output downlink. We show that a stem-connected MiLAC can realize every beamformer on the complex Stiefel manifold and prove that, when $N\ge 2K-1$, this Stiefel-restricted design achieves the same sum-rate as the fully-connected MiLAC, where $N$ and $K$ are the numbers of transmit antennas and users. We then develop a weighted minimum mean-square error solver with a Riemannian Stiefel update, together with a closed-form projection baseline and an alternating refinement for bounded, discrete susceptances. Simulations show that the stem-connected MiLAC matches fully-connected MiLAC performance, approaches the fully digital sum-rate upper bound without symbol-rate digital processing, and recovers most of the loss caused by direct hardware-grid quantization.
Symbol Error Analysis of Linear Receivers in Terahertz Channels under Channel-Noise Dependence
Jun 12, 2026This paper develops a comprehensive framework for the performance analysis of linear detectors, namely zero-forcing (ZF) and minimum mean-square error (MMSE), under diverse terahertz (THz) channel conditions. Three fading models are considered: Rayleigh fading, the $α$--$μ$ distribution for indoor THz environments, and the mixture-gamma (MG) distribution for outdoor THz scenarios. Semi-analytical, approximate, and asymptotic expressions for the symbol error rate (SER) are derived, explicitly incorporating the correlation between the channel and the additive noise arising from hardware impairments. This correlation is characterized using both statistical approaches and copula-based methods to effectively capture complex dependency structures. The theoretical findings are validated through simulations, demonstrating strong agreement with the derived expressions and confirming the accuracy and robustness of the proposed framework. The results demonstrate the significant impact of channel--noise dependence on THz-band receiver performance and verify the expected performance degradation of biased MMSE receivers in point-to-point links employing higher-order quadrature amplitude modulation. Specifically, at a target SER of $10^{-3}$, a 70\% correlation results in approximately a 6.5~dB degradation in the effective signal-to-noise ratio, with mismatched MMSE detection incurring an additional 1~dB loss compared to ZF. Nonetheless, MMSE offers enhanced numerical stability under severe channel fading conditions, where channel inversion causes noise amplification.
Quadratic Forms in Gaussian Random Variables Theoretical Results and Applications
May 10, 2026This manuscript reviews theoretical results and applications related to quadratic forms in Gaussian random variables. It summarizes definitions, canonical representations, exact and approximate distributional results, numerical inversion methods, applications, and selected open problems for real and complex quadratic forms, multiforms, and ratios of quadratic forms.
Quantization-Aware EE Optimization and SE-EE Tradeoff for MiLAC-Aided MU-MISO Beamforming
Apr 27, 2026In large antenna arrays, hardware power consumption becomes a dominant design constraint, making energy efficiency (EE) a first-class objective alongside spectral efficiency (SE). Microwave linear analog computer (MiLAC)-aided beamforming, whose front end is a passive reciprocal stream-to-antenna network, addresses this tension by reducing the active radio-frequency chain count to the stream number, at a moderate SE cost. Despite this promise, no EE optimization framework has been established for MiLAC-aided beamforming that accounts for digital-to-analog converter quantization noise and post-quantized transmit power. We fill this gap for downlink multiuser multiple-input single-output (MU-MISO) systems by formulating quantization-aware EE maximization over the MiLAC-feasible beamformer and characterizing the resulting SE-EE tradeoff. Three contributions follow. First, we prove a row-space optimality property of the effective MiLAC-aided beamformer, yielding an equivalent reduced-dimension reformulation whose complexity scales with the stream number rather than the antenna number. Second, we develop a low-complexity Dinkelbach-weighted minimum mean-square error algorithm aided by projected gradient descent that is guaranteed to converge to a stationary point. Third, we cast the SE-EE tradeoff as a multi-objective problem and trace its Pareto boundary via a weighted-sum method that combines an alternative reduced-dimension coordinate with auxiliary-variable successive convex approximation, yielding convex per-iteration subproblems with guaranteed convergence. Numerical results on a DeepMIMO v4 deployment show MiLAC-aided beamforming substantially improves EE over digital and hybrid benchmarks at a moderate SE cost and significantly expands the achievable SE-EE operating region.
ECG Foundation Models and Medical LLMs for Agentic Cardiovascular Intelligence at the Edge: A Review and Outlook
Apr 02, 2026Electrocardiogram (ECG) foundation models represent a paradigm shift from task-specific pipelines to generalizable architectures pre-trained on large-scale unlabeled waveform data. This survey presents a unified and deployment-aware review of foundation models and medical large language models (LLMs) for ECG intelligence in cardiovascular disease (CVD) diagnosis, monitoring, and clinical decision support. The central thesis of this survey paper is that next-generation cardiovascular AI systems will be inherently agentic, requiring the synergistic integration of two complementary model classes: (i) ECG foundation models that act as signal-level interpreters, learning rich electrophysiological representations via self-supervised and multimodal pretraining, and (ii) medical LLMs, trained on biomedical text corpora, that function as knowledge-based reasoning backbones for contextual inference, guideline alignment, and clinical decision support. Thus, the survey systematically reviews existing pool of generalist medical LLMs, as well as ECG foundation models that utilize techniques such as self-supervised learning, multimodal ECG-language alignment, vision transformer architectures, and possess capabilities such as zero-shot classification, automated report generation, and longitudinal risk modeling. Recognizing the constraints of consumer-grade wearable edge devices, we further examine model optimization techniques such as quantization, pruning, knowledge distillation, as well as the role of small language models in enabling low-latency, energy-efficient, and privacy-preserving ECG intelligence on edge platforms such as smartwatches. Finally, we outline future directions in multimodal ECG foundation models, agent-driven monitoring, and explainable, secure edge intelligence, with particular emphasis on real-time, on-device cardiovascular analytics in consumer electronics ecosystems.
LEO Constellations as a Decentralized GNSS Network: Optimizing PNT Corrections in Space
Dec 24, 2025
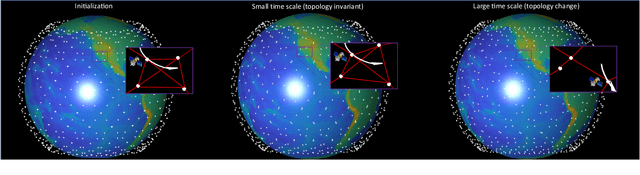
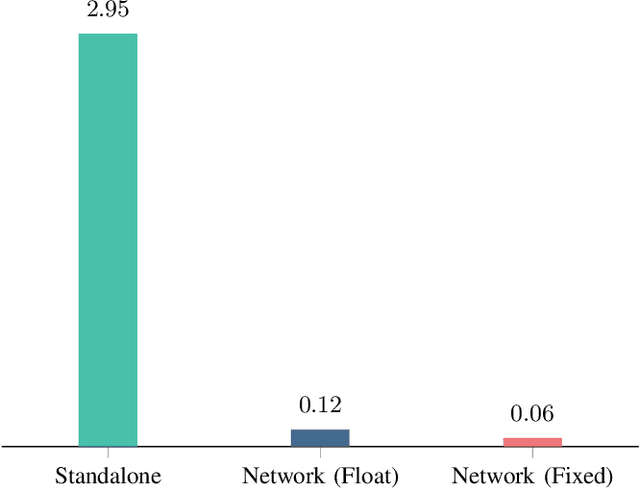
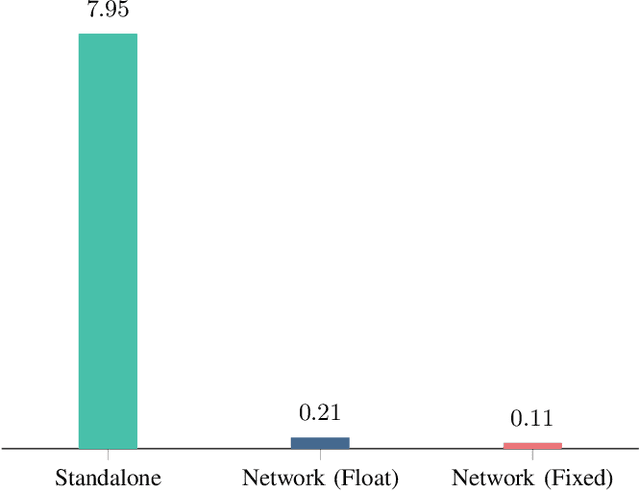
With the rapid expansion of low Earth orbit (LEO) constellations, thousands of satellites are now in operation, many equipped with onboard GNSS receivers capable of continuous orbit determination and time synchronization. This development is creating an unprecedented spaceborne GNSS network, offering new opportunities for network-driven precise LEO orbit and clock estimation. Yet, current onboard GNSS processing is largely standalone and often insufficient for high-precision applications, while centralized fusion is challenging due to computational bottlenecks and the lack of in-orbit infrastructure. In this work, we report a decentralized GNSS network over large-scale LEO constellations, where each satellite processes its own measurements while exchanging compact information with neighboring nodes to enable precise orbit and time determination. We model the moving constellation as a dynamic graph and tailor a momentum-accelerated gradient tracking (GT) method to ensure steady convergence despite topology changes. Numerical simulations with constellations containing hundreds of satellites show that the proposed method matches the accuracy of an ideal centralized benchmark, while substantially reducing communication burdens. Ultimately, this framework supports the development of autonomous and self-organizing space systems, enabling high-precision navigation with reduced dependence on continuous ground contact.
Decentralized GNSS at Global Scale via Graph-Aware Diffusion Adaptation
Dec 23, 2025



Network-based Global Navigation Satellite Systems (GNSS) underpin critical infrastructure and autonomous systems, yet typically rely on centralized processing hubs that limit scalability, resilience, and latency. Here we report a global-scale, decentralized GNSS architecture spanning hundreds of ground stations. By modeling the receiver network as a time-varying graph, we employ a deep linear neural network approach to learn topology-aware mixing schedules that optimize information exchange. This enables a gradient tracking diffusion strategy wherein stations execute local inference and exchange succinct messages to achieve two concurrent objectives: centimeter-level self-localization and network-wide consensus on satellite correction products. The consensus products are broadcast to user receivers as corrections, supporting precise point positioning (PPP) and precise point positioning-real-time kinematic (PPP-RTK). Numerical results demonstrate that our method matches the accuracy of centralized baselines while significantly outperforming existing decentralized methods in convergence speed and communication overhead. By reframing decentralized GNSS as a networked signal processing problem, our results pave the way for integrating decentralized optimization, consensus-based inference, and graph-aware learning as effective tools in operational satellite navigation.
Decentralized Cooperative Beamforming for Networked LEO Satellites with Statistical CSI
Dec 21, 2025Inter-satellite-link-enabled low-Earth-orbit (LEO) satellite constellations are evolving toward networked architectures that support constellation-level cooperation, enabling multiple satellites to jointly serve user terminals through cooperative beamforming. While such cooperation can substantially enhance link budgets and achievable rates, its practical realization is challenged by the scalability limitations of centralized beamforming designs and the stringent computational and signaling constraints of large LEO constellations. This paper develops a fully decentralized cooperative beamforming framework for networked LEO satellite downlinks. Using an ergodic-rate-based formulation, we first derive a centralized weighted minimum mean squared error (WMMSE) solution as a performance benchmark. Building on this formulation, we propose a topology-agnostic decentralized beamforming algorithm by localizing the benchmark and exchanging a set of globally coupled variables whose dimensions are independent of the antenna number and enforcing consensus over arbitrary connected inter-satellite networks. The resulting algorithm admits fully parallel execution across satellites. To further enhance scalability, we eliminate the consensus-related auxiliary variables in closed form and derive a low-complexity per-satellite update rule that is optimal to local iteration and admits a quasi-closed-form solution via scalar line search. Simulation results show that the proposed decentralized schemes closely approach centralized performance under practical inter-satellite topologies, while significantly reducing computational complexity and signaling overhead, enabling scalable cooperative beamforming for large LEO constellations.
Integrated Positioning and Communication for Cooperative Multi-LEO Uplink Communications: A Dual-Timescale Kalman Filter-Aided Approach
Nov 18, 2025Low Earth orbit (LEO) satellites are a crucial component of the future non-terrestrial networks (NTN) due to lower latency, robust signal strengths, shorter revisit times, and dense constellations. However, acquiring reliable channel state information (CSI) in LEO satellite communication remains challenging owing to severe signal attenuation over long propagation distances and short coherence times. Despite these challenges, LEO channels benefit from pronounced line-of-sight dominance and geometric properties inherently tied to positioning information. In this work, we propose an integrated positioning and communication (IPAC) framework for multi-LEO satellite networks to address the unique challenges posed by LEO channels. Specifically, we leverage in-the-loop LEO positioning to exploit users' position information for improving uplink CSI acquisition. To overcome the link-budget limitations of single-satellite systems, cooperative multi-LEO uplink data detection is adopted. By exploiting the different coherent timescales of position-related parameters and random channel gains, we develop a dual-timescale Kalman filter-based IPAC framework: an unscented Kalman filter (UKF) for tracking users' position and velocity in the large-timescale, and a Kalman filter that leverages the position information obtained in the large-timescale for improved data-aided uplink channel estimation in the small-timescale. Finally, the two tasks of channel estimation and cooperative data detection are jointly addressed through the expectation maximization (EM) algorithm. Numerical results demonstrate that the proposed IPAC approach outperforms the conventional baseline in terms of channel estimation accuracy and communication performance.