 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantization-Aware EE Optimization and SE-EE Tradeoff for MiLAC-Aided MU-MISO Beamforming
Apr 27, 2026In large antenna arrays, hardware power consumption becomes a dominant design constraint, making energy efficiency (EE) a first-class objective alongside spectral efficiency (SE). Microwave linear analog computer (MiLAC)-aided beamforming, whose front end is a passive reciprocal stream-to-antenna network, addresses this tension by reducing the active radio-frequency chain count to the stream number, at a moderate SE cost. Despite this promise, no EE optimization framework has been established for MiLAC-aided beamforming that accounts for digital-to-analog converter quantization noise and post-quantized transmit power. We fill this gap for downlink multiuser multiple-input single-output (MU-MISO) systems by formulating quantization-aware EE maximization over the MiLAC-feasible beamformer and characterizing the resulting SE-EE tradeoff. Three contributions follow. First, we prove a row-space optimality property of the effective MiLAC-aided beamformer, yielding an equivalent reduced-dimension reformulation whose complexity scales with the stream number rather than the antenna number. Second, we develop a low-complexity Dinkelbach-weighted minimum mean-square error algorithm aided by projected gradient descent that is guaranteed to converge to a stationary point. Third, we cast the SE-EE tradeoff as a multi-objective problem and trace its Pareto boundary via a weighted-sum method that combines an alternative reduced-dimension coordinate with auxiliary-variable successive convex approximation, yielding convex per-iteration subproblems with guaranteed convergence. Numerical results on a DeepMIMO v4 deployment show MiLAC-aided beamforming substantially improves EE over digital and hybrid benchmarks at a moderate SE cost and significantly expands the achievable SE-EE operating region.
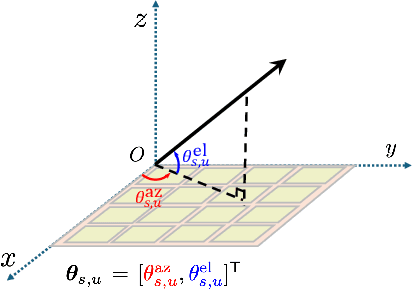
Integrated Positioning and Communication for Cooperative Multi-LEO Uplink Communications: A Dual-Timescale Kalman Filter-Aided Approach
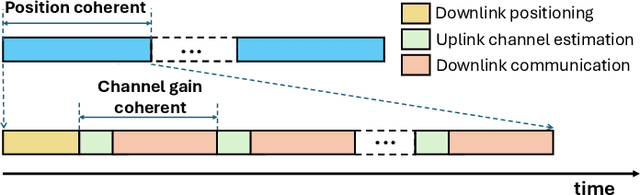
Nov 18, 2025Low Earth orbit (LEO) satellites are a crucial component of the future non-terrestrial networks (NTN) due to lower latency, robust signal strengths, shorter revisit times, and dense constellations. However, acquiring reliable channel state information (CSI) in LEO satellite communication remains challenging owing to severe signal attenuation over long propagation distances and short coherence times. Despite these challenges, LEO channels benefit from pronounced line-of-sight dominance and geometric properties inherently tied to positioning information. In this work, we propose an integrated positioning and communication (IPAC) framework for multi-LEO satellite networks to address the unique challenges posed by LEO channels. Specifically, we leverage in-the-loop LEO positioning to exploit users' position information for improving uplink CSI acquisition. To overcome the link-budget limitations of single-satellite systems, cooperative multi-LEO uplink data detection is adopted. By exploiting the different coherent timescales of position-related parameters and random channel gains, we develop a dual-timescale Kalman filter-based IPAC framework: an unscented Kalman filter (UKF) for tracking users' position and velocity in the large-timescale, and a Kalman filter that leverages the position information obtained in the large-timescale for improved data-aided uplink channel estimation in the small-timescale. Finally, the two tasks of channel estimation and cooperative data detection are jointly addressed through the expectation maximization (EM) algorithm. Numerical results demonstrate that the proposed IPAC approach outperforms the conventional baseline in terms of channel estimation accuracy and communication performance.
Positioning Using LEO Satellite Communication Signals Under Orbital Errors
Nov 08, 2025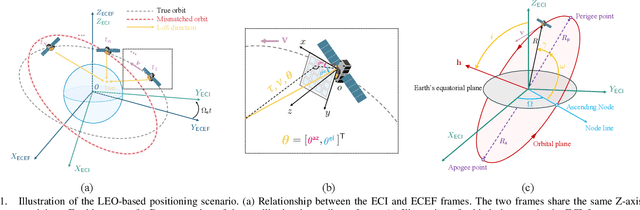
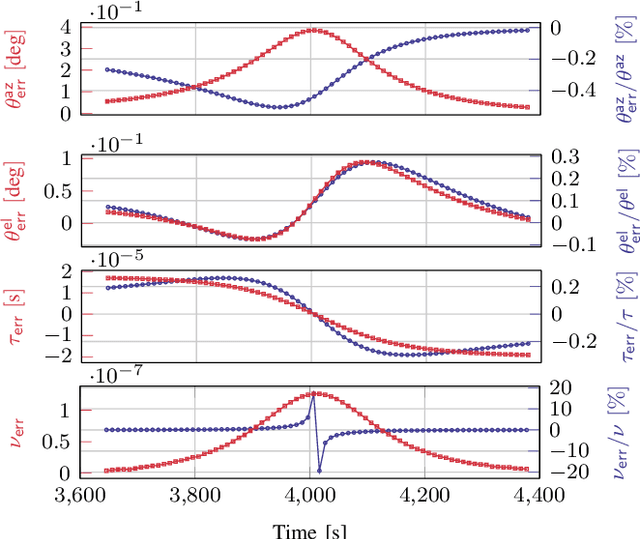
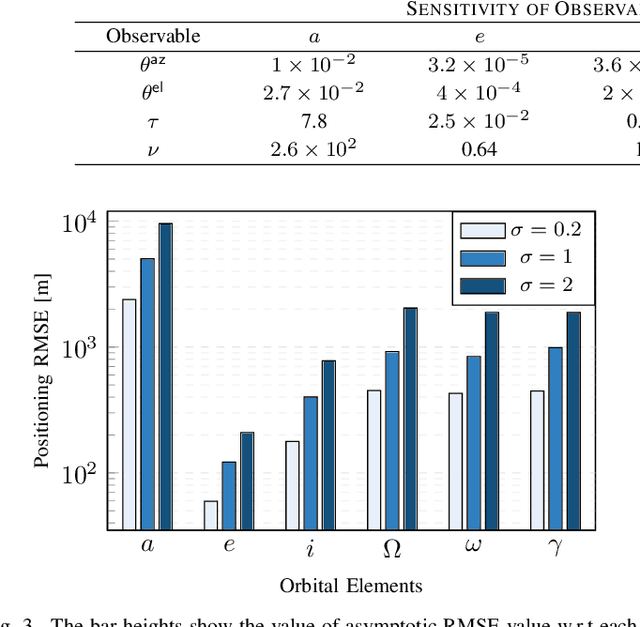
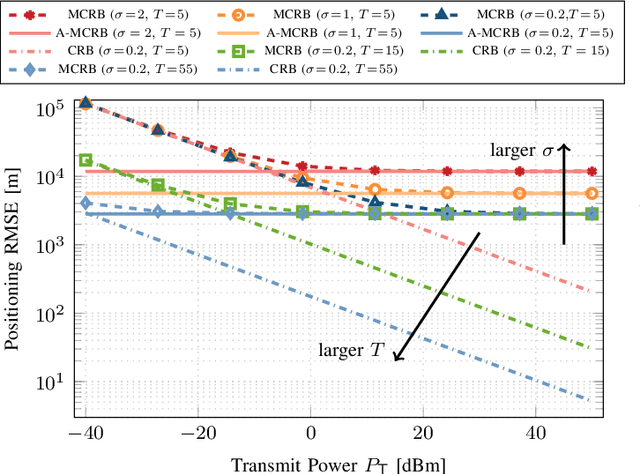
Low Earth orbit (LEO) satellites offer a promising alternative to global navigation satellite systems for precise positioning; however, their relatively low altitudes make them more susceptible to orbital perturbations, which in turn degrade positioning accuracy. In this work, we study LEO-based positioning under orbital errors within a signal-of-opportunity framework. First, we introduce a LEO orbit model that accounts for Earth's non-sphericity and derive a wideband communication model that captures fast- and slow-time Doppler effects and multipath propagation. Subsequently, we perform a misspecified Cramér-Rao bound (MCRB) analysis to evaluate the impact of orbital errors on positioning performance. Then, we propose a two-stage positioning method starting with a (i) MCRB-based weighted orbit calibration, followed by (ii) least-squares user positioning using the corrected orbit. The MCRB analysis indicates that orbital errors can induce kilometer-level position biases. Extensive simulations show that the proposed estimator can considerably enhance the positioning accuracy relative to the orbit-mismatched baseline, yielding errors on the order of a few meters.
Tri-Hybrid Multi-User Precoding Using Pattern-Reconfigurable Antennas: Fundamental Models and Practical Algorithms
May 13, 2025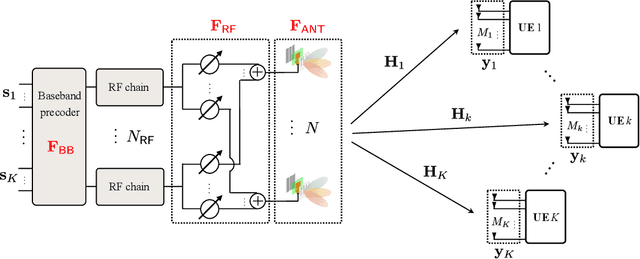


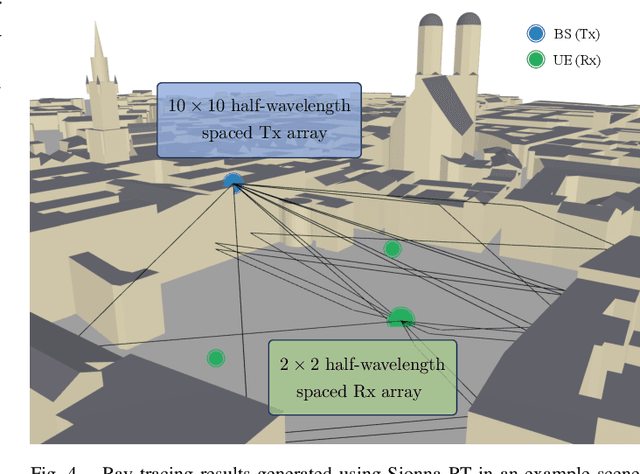
The integration of pattern-reconfigurable antennas into hybrid multiple-input multiple-output (MIMO) architectures presents a promising path toward high-efficiency and low-cost transceiver solutions. Pattern-reconfigurable antennas can dynamically steer per-antenna radiation patterns, enabling more efficient power utilization and interference suppression. In this work, we study a tri-hybrid MIMO architecture for multi-user communication that integrates digital, analog, and antenna-domain precoding using pattern-reconfigurable antennas. For characterizing the reconfigurability of antenna radiation patterns, we develop two models -- Model~I and Model~II. Model~I captures realistic hardware constraints through limited pattern selection, while Model~II explores the performance upper bound by assuming arbitrary pattern generation. Based on these models, we develop two corresponding tri-hybrid precoding algorithms grounded in the weighted minimum mean square error (WMMSE) framework, which alternately optimize the digital, analog, and antenna precoders under practical per-antenna power constraints. Realistic simulations conducted in ray-tracing generated environments are utilized to evaluate the proposed system and algorithms. The results demonstrate the significant potential of the considered tri-hybrid architecture in enhancing communication performance and hardware efficiency. However, they also reveal that the existing hardware is not yet capable of fully realizing these performance gains, underscoring the need for joint progress in antenna design and communication theory development.
Tri-Hybrid Multi-User Precoding Based on Electromagnetically Reconfigurable Antennas
May 04, 2025The tri-hybrid precoding architecture based on electromagnetically reconfigurable antennas (ERAs) is a promising solution for overcoming key limitations in multiple-input multiple-output communication systems. Aiming to further understand its potential, this paper investigates the tri-hybrid multi-user precoding problem using pattern reconfigurable ERAs. To reduce model complexity and improve practicality, we characterize each antenna's radiation pattern using a spherical harmonics decomposition. While mathematically tractable, this approach may lead to over-optimized patterns that are physically unrealizable. To address this, we introduce a projection step that maps the optimized patterns onto a realizable set. Simulation results demonstrate that spherical harmonics-based radiation pattern optimization significantly enhances sum rate performance. However, after projection onto a realizable set obtained from real ERA hardware, the performance gain is notably reduced or even negligible, underscoring the need for more effective projection techniques and improved reconfigurable antenna hardware.
Enhanced Beampattern Synthesis Using Electromagnetically Reconfigurable Antennas
Mar 05, 2025Beampattern synthesis seeks to optimize array weights to shape radiation patterns, playing a critical role in various wireless applications. In addition to theoretical advancements, recent hardware innovations have facilitated new avenues to enhance beampattern synthesis performance. This paper studies the beampattern synthesis problem using newly proposed electromagnetically reconfigurable antennas (ERAs). By utilizing spherical harmonics decomposition, we simultaneously optimize each antenna's radiation pattern and phase shift to match a desired beampattern of the entire array. The problem is formulated for both far-field and near-field scenarios, with the optimization solved using Riemannian manifold techniques. The simulation results validate the effectiveness of the proposed solution and illustrate that ERAs exhibit superior beampattern synthesis capabilities compared to conventional fixed radiation pattern antennas. This advantage becomes increasingly significant as the array size grows.
Joint Bistatic Positioning and Monostatic Sensing: Optimized Beamforming and Performance Tradeoff
Mar 05, 2025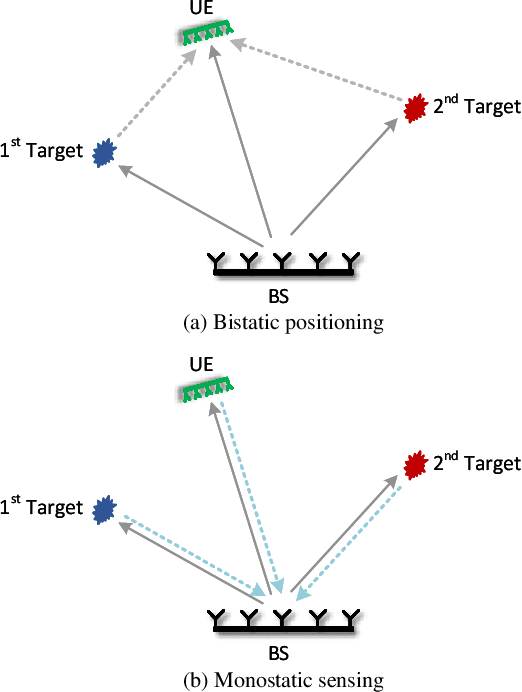
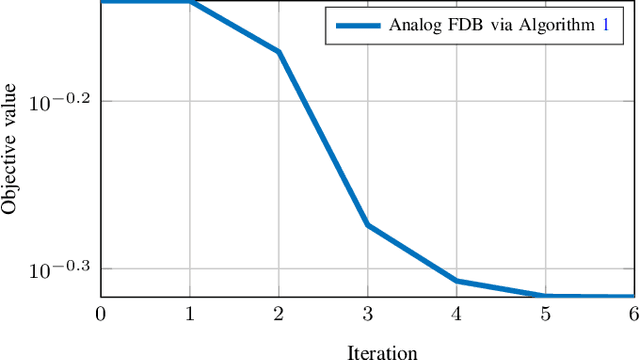
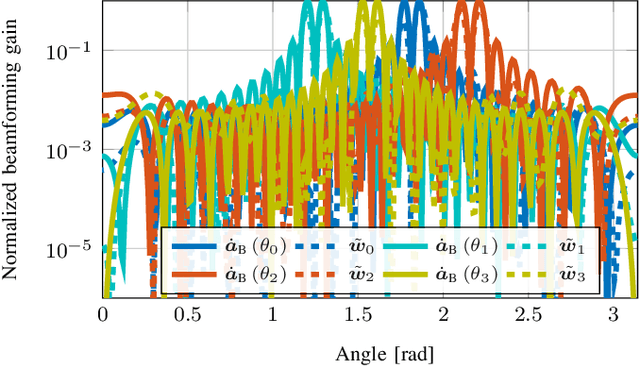
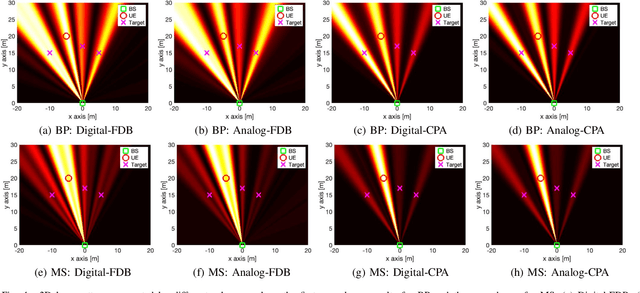
We investigate joint bistatic positioning (BP) and monostatic sensing (MS) within a multi-input multi-output orthogonal frequency-division system. Based on the derived Cram\'er-Rao Bounds (CRBs), we propose novel beamforming optimization strategies that enable flexible performance trade-offs between BP and MS. Two distinct objectives are considered in this multi-objective optimization problem, namely, enabling user equipment to estimate its own position while accounting for unknown clock bias and orientation, and allowing the base station to locate passive targets. We first analyze digital schemes, proposing both weighted-sum CRB and weighted-sum mismatch (of beamformers and covariance matrices) minimization approaches. These are examined under full-dimension beamforming (FDB) and low-complexity codebook-based power allocation (CPA). To adapt to low-cost hardwares, we develop unit-amplitude analog FDB and CPA schemes based on the weighted-sum mismatch of the covariance matrices paradigm, solved using distinct methods. Numerical results confirm the effectiveness of our designs, highlighting the superiority of minimizing the weighted-sum mismatch of covariance matrices, and the advantages of mutual information fusion between BP and MS.
Electromagnetically Reconfigurable Fluid Antenna System for Wireless Communications: Design, Modeling, Algorithm, Fabrication, and Experiment
Feb 27, 2025



This paper presents the concept, design, channel modeling, beamforming algorithm, prototype fabrication, and experimental measurement of an electromagnetically reconfigurable fluid antenna system (ER-FAS), in which each FAS array element features electromagnetic (EM) reconfigurability. Unlike most existing FAS works that investigate spatial reconfigurability, the proposed ER-FAS enables direct control over the EM characteristics of each element, allowing for dynamic radiation pattern reconfigurability. Specifically, a novel ER-FAS architecture leveraging software-controlled fluidics is proposed, and corresponding wireless channel models are established. A low-complexity greedy beamforming algorithm is developed to jointly optimize the analog phase shift and the radiation state of each array element. The accuracy of the ER-FAS channel model and the effectiveness of the beamforming algorithm are validated through (i) full-wave EM simulations and (ii) numerical spectral efficiency evaluations. Simulation results confirm that the proposed ER-FAS significantly enhances spectral efficiency compared to conventional antenna arrays. To further validate this design, we fabricate hardware prototypes for both the ER-FAS element and array, using Galinstan liquid metal alloy, fluid silver paste, and software-controlled fluidic channels. The simulation results are experimentally verified through prototype measurements conducted in an anechoic chamber. Additionally, indoor communication trials are conducted via a pair of software-defined radios which demonstrate superior received power and bit error rate performance of the ER-FAS prototype. This work presents the first demonstration of a liquid-based ER-FAS in array configuration for enhancing communication systems.
Positioning-Aided Channel Estimation for Multi-LEO Satellite Downlink Communications
Feb 09, 2025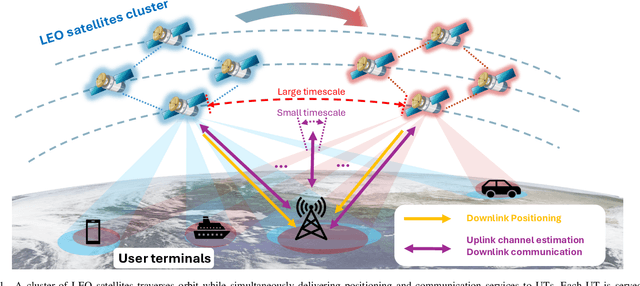
We investigate a multi-low Earth orbit (LEO) satellite system that simultaneously provides positioning and communication services to terrestrial user terminals. To address the challenges of channel estimation in LEO satellite systems, we propose a novel two-timescale positioning-aided channel estimation framework, exploiting the distinct variation rates of position-related parameters and channel gains inherent in LEO satellite channels. Using the misspecified Cramer-Rao bound (MCRB) theory, we systematically analyze positioning performance under practical imperfections, such as inter-satellite clock bias and carrier frequency offset. Furthermore, we theoretically demonstrate how position information derived from downlink positioning can enhance uplink channel estimation accuracy, even in the presence of positioning errors, through an MCRB-based analysis. To overcome the constraints of limited link budgets and communication rates associated with single-satellite-based communication, we develop a distributed beamforming strategy for downlink communication. This strategy allows LEO satellites to independently optimize their beamformers using local channel state information, eliminating the need for centralized processing while preserving the advantages of multi-satellite cooperative communication. Theoretical analyses and numerical results confirm the effectiveness of the proposed framework in achieving high-precision downlink positioning under practical imperfections, facilitating uplink channel estimation, and enabling efficient downlink communication.
Optimized Beamforming for Joint Bistatic Positioning and Monostatic Sensing
Jan 20, 2025We investigate the performance tradeoff between \textit{bistatic positioning (BP)} and \textit{monostatic sensing (MS)} in a multi-input multi-output orthogonal frequency division multiplexing scenario. We derive the Cram\'er-Rao bounds (CRBs) for BP at the user equipment and MS at the base station. To balance these objectives, we propose a multi-objective optimization framework that optimizes beamformers using a weighted-sum CRB approach, ensuring the weak Pareto boundary. We also introduce two mismatch-minimizing approaches, targeting beamformer mismatch and variance matrix mismatch, and solve them distinctly. Numerical results demonstrate the performance tradeoff between BP and MS, revealing significant gains with the proposed methods and highlighting the advantages of minimizing the weighted-sum mismatch of variance matrices.