 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTri-Hybrid Multi-User Precoding Using Pattern-Reconfigurable Antennas: Fundamental Models and Practical Algorithms
May 13, 2025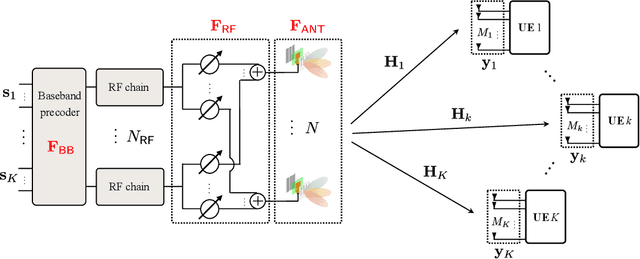


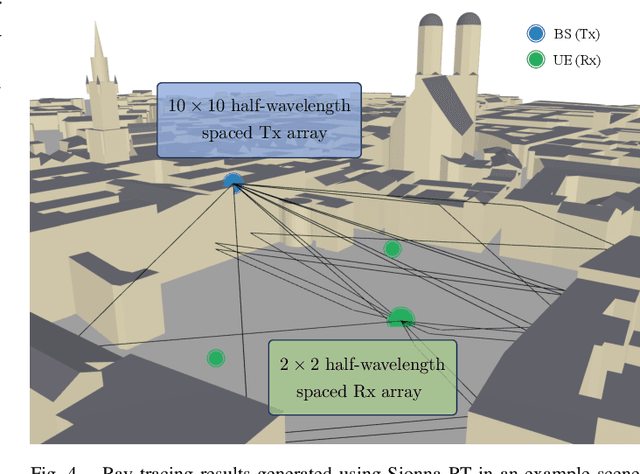
The integration of pattern-reconfigurable antennas into hybrid multiple-input multiple-output (MIMO) architectures presents a promising path toward high-efficiency and low-cost transceiver solutions. Pattern-reconfigurable antennas can dynamically steer per-antenna radiation patterns, enabling more efficient power utilization and interference suppression. In this work, we study a tri-hybrid MIMO architecture for multi-user communication that integrates digital, analog, and antenna-domain precoding using pattern-reconfigurable antennas. For characterizing the reconfigurability of antenna radiation patterns, we develop two models -- Model~I and Model~II. Model~I captures realistic hardware constraints through limited pattern selection, while Model~II explores the performance upper bound by assuming arbitrary pattern generation. Based on these models, we develop two corresponding tri-hybrid precoding algorithms grounded in the weighted minimum mean square error (WMMSE) framework, which alternately optimize the digital, analog, and antenna precoders under practical per-antenna power constraints. Realistic simulations conducted in ray-tracing generated environments are utilized to evaluate the proposed system and algorithms. The results demonstrate the significant potential of the considered tri-hybrid architecture in enhancing communication performance and hardware efficiency. However, they also reveal that the existing hardware is not yet capable of fully realizing these performance gains, underscoring the need for joint progress in antenna design and communication theory development.
Tri-Hybrid Multi-User Precoding Based on Electromagnetically Reconfigurable Antennas
May 04, 2025The tri-hybrid precoding architecture based on electromagnetically reconfigurable antennas (ERAs) is a promising solution for overcoming key limitations in multiple-input multiple-output communication systems. Aiming to further understand its potential, this paper investigates the tri-hybrid multi-user precoding problem using pattern reconfigurable ERAs. To reduce model complexity and improve practicality, we characterize each antenna's radiation pattern using a spherical harmonics decomposition. While mathematically tractable, this approach may lead to over-optimized patterns that are physically unrealizable. To address this, we introduce a projection step that maps the optimized patterns onto a realizable set. Simulation results demonstrate that spherical harmonics-based radiation pattern optimization significantly enhances sum rate performance. However, after projection onto a realizable set obtained from real ERA hardware, the performance gain is notably reduced or even negligible, underscoring the need for more effective projection techniques and improved reconfigurable antenna hardware.
Enhanced Beampattern Synthesis Using Electromagnetically Reconfigurable Antennas
Mar 05, 2025Beampattern synthesis seeks to optimize array weights to shape radiation patterns, playing a critical role in various wireless applications. In addition to theoretical advancements, recent hardware innovations have facilitated new avenues to enhance beampattern synthesis performance. This paper studies the beampattern synthesis problem using newly proposed electromagnetically reconfigurable antennas (ERAs). By utilizing spherical harmonics decomposition, we simultaneously optimize each antenna's radiation pattern and phase shift to match a desired beampattern of the entire array. The problem is formulated for both far-field and near-field scenarios, with the optimization solved using Riemannian manifold techniques. The simulation results validate the effectiveness of the proposed solution and illustrate that ERAs exhibit superior beampattern synthesis capabilities compared to conventional fixed radiation pattern antennas. This advantage becomes increasingly significant as the array size grows.
Optimizing Smart Helper Placement for Enhanced Cache Efficiency in F-RANs
Jan 28, 2025



Smart helpers (SHs) have been proposed to improve content delivery delays and alleviate high fronthaul loads in fog radio access networks (F-RANs). They offer an alternative to deploying additional enhanced remote radio heads (RRHs), which are often infeasible due to site constraints.} The optimal placement of SHs can significantly increase the number of users they serve which leads to enhanced cache efficiency and improved content delivery delay. In this letter, we optimize SH placement within an F-RAN to maximize the cache hit rate and further reduce the content delivery latency. We model the SH cache hit rate as a function of outage probability and user density distribution. We develop a function to estimate user density distribution leveraging the radial basis functions (RBFs) method and optimize SH placement utilizing the particle swarm optimization (PSO) algorithm. \an{Our} numerical results confirm the effectiveness of the proposed approach in maximizing the \an{SH cache hit rate}, thereby improving delivery delays and fronthaul loads of the network.
Holographic MIMO: How Many Antennas Do We Need for Energy Efficient Transmission?
Apr 14, 2023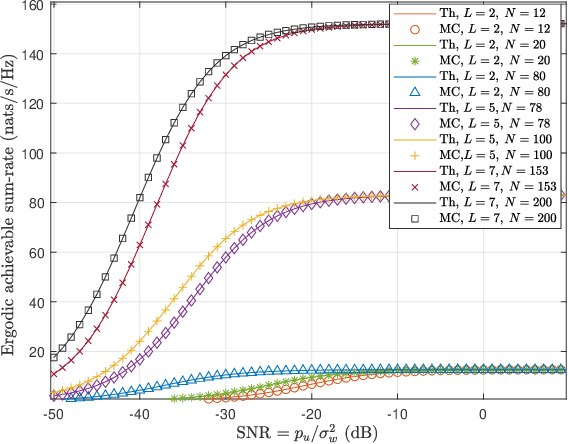
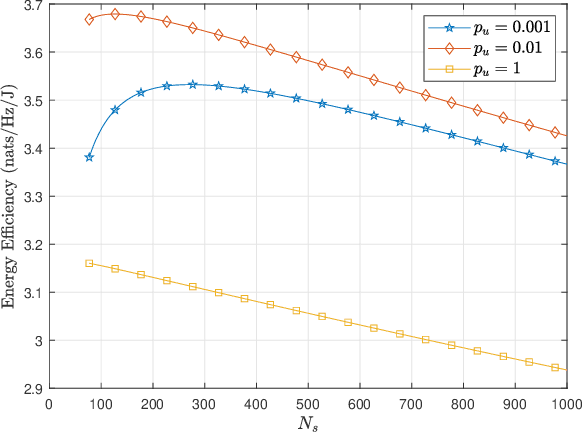
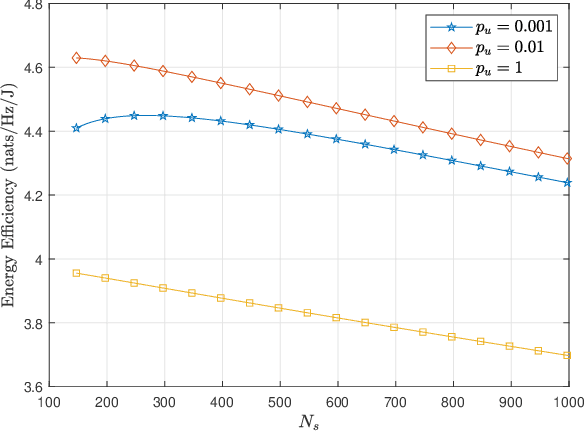
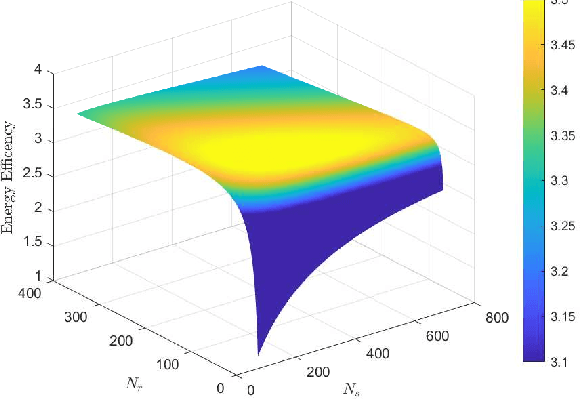
Holographic multiple-input multiple-output (HMIMO) communication systems utilize spatially-constrained massive MIMO arrays containing large numbers of antennas with sub-wavelength spacing, and have emerged as a promising candidate technology for Sixth Generation (6G) networks. In this paper, we consider the downlink of a multi-user HMIMO communication system under a Fourier plane-wave series representation of the stochastic electromagnetic MIMO channel model, and make two important contributions. First, we present a closed-form expression of the ergodic achievable downlink rate under maximum ratio transmission (MRT) precoding at the base station (BS). The derived expression explicitly shows the effect of the side-lengths of the HMIMO surfaces at the BS and each user, and the number of antennas deployed in these surfaces on the user rates. Second, we formulate an energy efficiency (EE) maximization problem with respect to the number of antennas arranged within spatially-constrained HMIMO surfaces at the BS and each user. The resulting implicit solution for this problem is shown to be globally optimal. Numerical results yield useful insights into the EE performance of multi-user HMIMO systems in different operating regimes.
Improving UAV Communication in Cell Free MIMO Using a Reconfigurable Intelligent Surface
Sep 21, 2022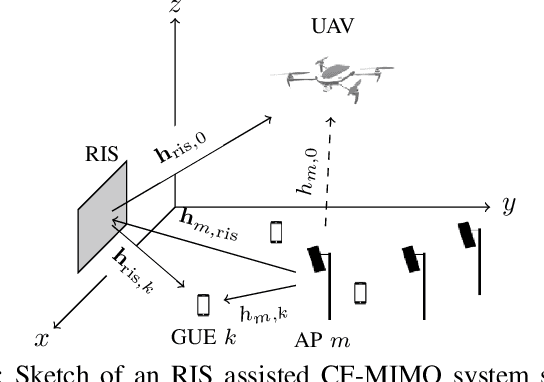
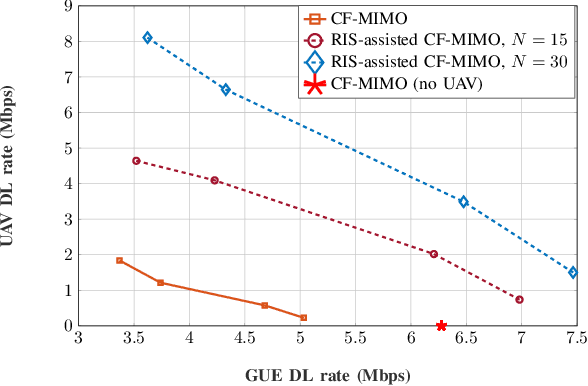
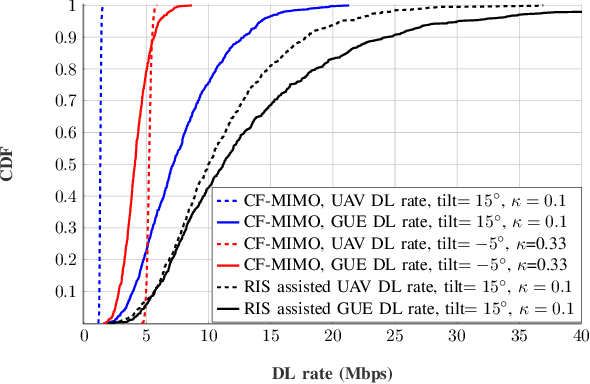
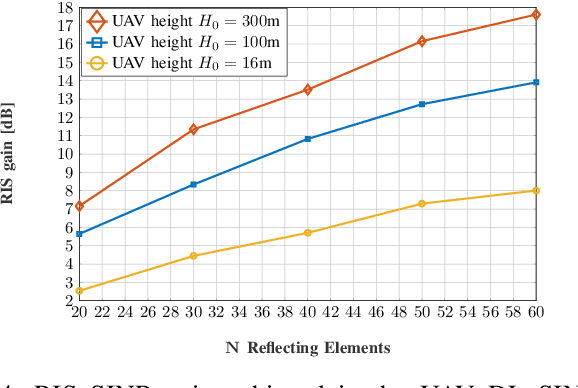
Communication with unmanned aerial vehicles (UAVs) in current terrestrial networks suffers from poor signal strength due to the down-tilt of the access points (APs) that are optimized to serve ground users ends (GUEs). To solve this, one could tilt the AP antenna upwards or allocate more power to serve the UAV. However, this negatively affects GUE downlink (DL) rates. In this paper, we propose to solve this challenge using a reconfigurable intelligent surface (RIS) to enhance the UAV communication while preserving the 3GPP- prescribed downwards antenna tilt and potentially improving the DL performance of the GUE. We show that under conjugate beamforming (CB) precoding and proper power split between GUEs and the UAV at the APs, an RIS with phase-shifts configured to reflect radio signals towards the UAV can significantly improve the UAV DL throughput while simultaneously benefiting the GUEs. The presented numerical results show that the RIS- aided system can serve a UAV with a required data rate while improving the GUEs DL performance relative to that in a CF- MIMO system without a UAV and an RIS. We support this conclusion through simulations under a varying numbers of RIS reflecting elements, UAV heights, and power split factor.
Joint Activity and Blind Information Detection for UAV-Assisted Massive IoT Access
Jan 03, 2022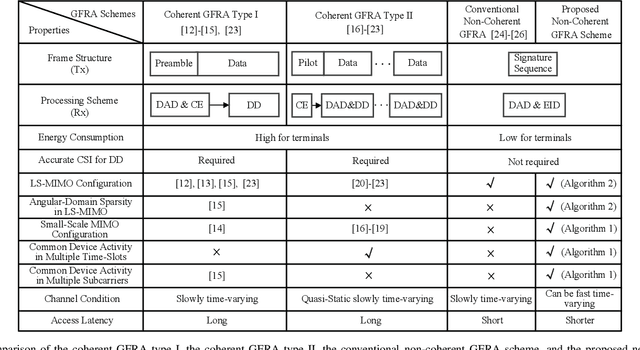

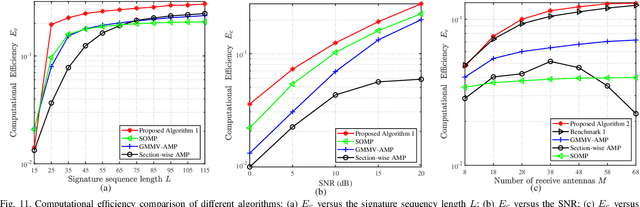
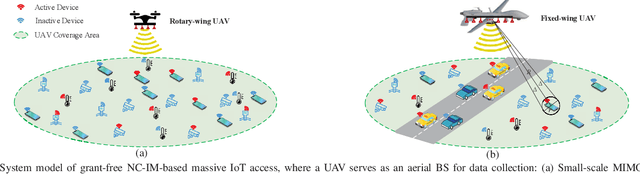
Grant-free non-coherent index-modulation (NC-IM) has been recently considered as an efficient massive access scheme for enabling cost- and energy-limited Internet-of-Things (IoT) devices that transmit small data packets. This paper investigates the grant-free NC-IM scheme combined with orthogonal frequency division multiplexing for applicant to unmanned aerial vehicle (UAV)-based massive IoT access. Specifically, each device is assigned a unique non-orthogonal signature sequence codebook. Each active device transmits one of its signature sequences in the given time-frequency resources, by modulating the information in the index of the transmitted signature sequence. For small-scale multiple-input multiple-output (MIMO) deployed at the UAV-based aerial base station (BS), by jointly exploiting the space-time-frequency domain device activity, we propose a computationally efficient space-time-frequency joint activity and blind information detection (JABID) algorithm with significantly improved detection performance. Furthermore, for large-scale MIMO deployed at the aerial BS, by leveraging the sparsity of the virtual angular-domain channels, we propose an angular-domain based JABID algorithm for improving the system performance with reduced access latency. In addition, for the case of high mobility IoT devices and/or UAVs, we introduce a time-frequency spread transmission (TFST) strategy for the proposed JABID algorithms to combat doubly-selective fading channels. Finally, extensive simulation results are illustrated to verify the superiority of the proposed algorithms and the TFST strategy over known state-of-the-art algorithms.
Energy Efficient Federated Learning in Integrated Fog-Cloud Computing Enabled Internet-of-Things Networks
Jul 07, 2021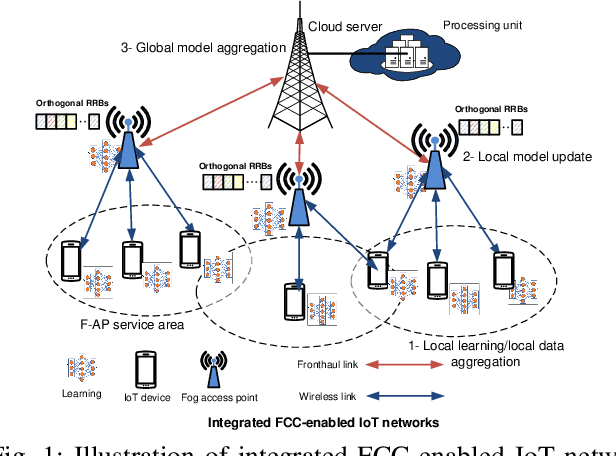
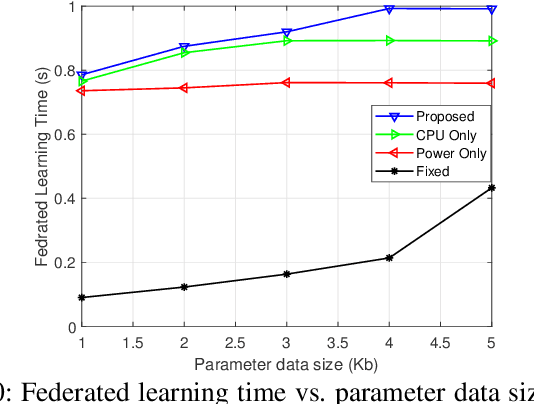
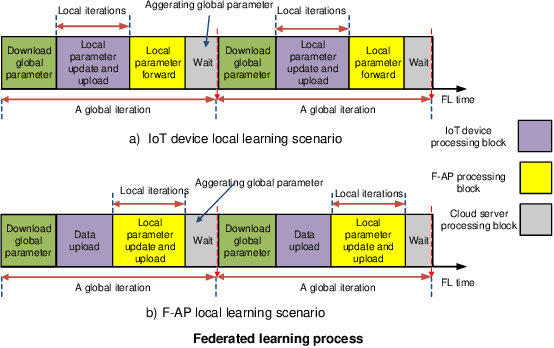
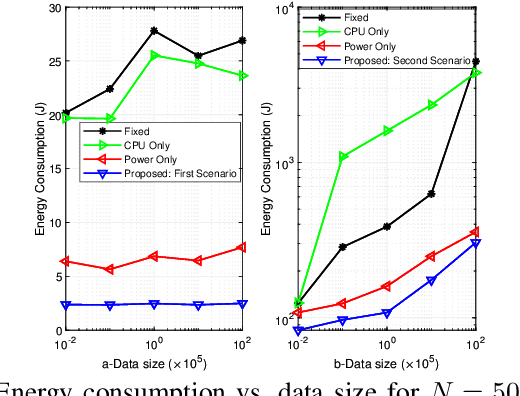
We investigate resource allocation scheme to reduce the energy consumption of federated learning (FL) in the integrated fog-cloud computing enabled Internet-of-things (IoT) networks. In the envisioned system, IoT devices are connected with the centralized cloud server (CS) via multiple fog access points (F-APs). We consider two different scenarios for training the local models. In the first scenario, local models are trained at the IoT devices and the F-APs upload the local model parameters to the CS. In the second scenario, local models are trained at the F-APs based on the collected data from the IoT devices and the F-APs collaborate with the CS for updating the model parameters. Our objective is to minimize the overall energy-consumption of both scenarios subject to FL time constraint. Towards this goal, we devise a joint optimization of scheduling of IoT devices with the F-APs, transmit power allocation, computation frequency allocation at the devices and F-APs and decouple it into two subproblems. In the first subproblem, we optimize the IoT device scheduling and power allocation, while in the second subproblem, we optimize the computation frequency allocation. For each scenario, we develop a conflict graph based solution to iteratively solve the two subproblems. Simulation results show that the proposed two schemes achieve a considerable performance gain in terms of the energy consumption minimization. The presented simulation results interestingly reveal that for a large number of IoT devices and large data sizes, it is more energy efficient to train the local models at the IoT devices instead of the F-APs.
RIS-Aided Cell-Free Massive MIMO: Performance Analysis and Competitiveness
May 14, 2021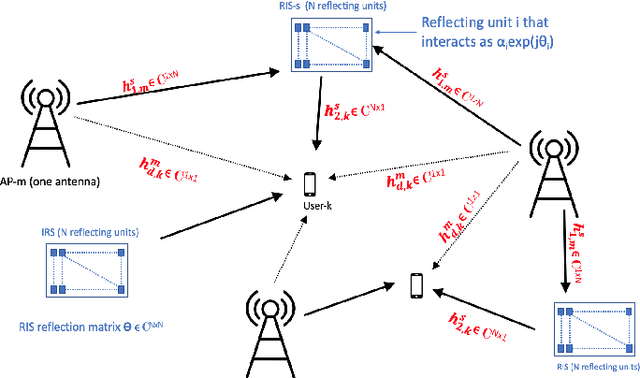
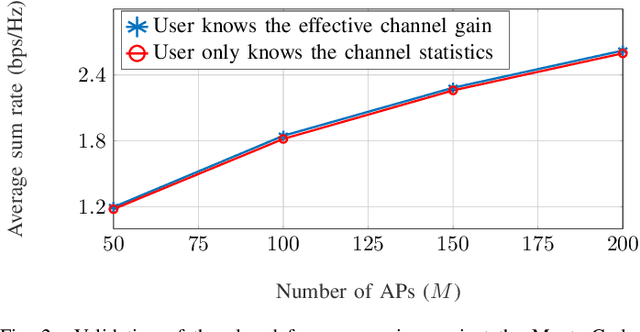
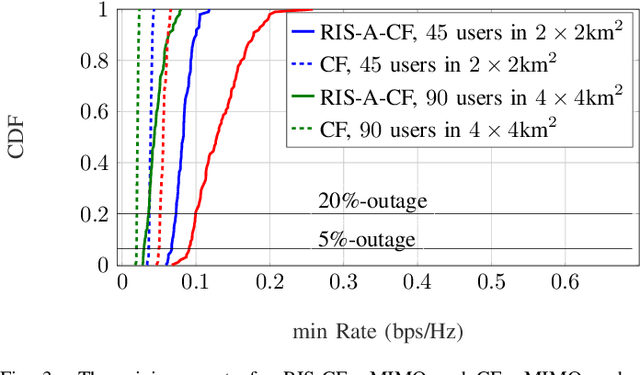
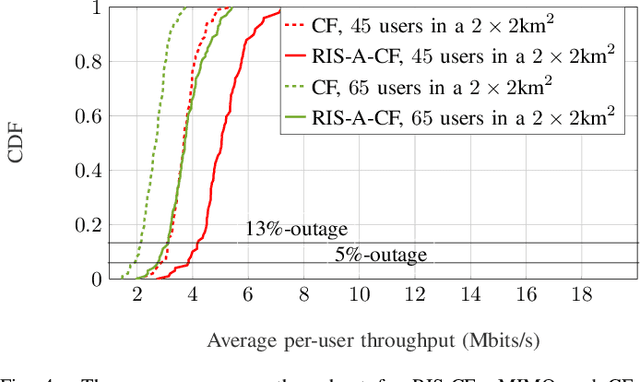
In this paper, we consider and study a cell-free massive MIMO (CF-mMIMO) system aided with reconfigurable intelligent surfaces (RISs), where a large number of access points (APs) cooperate to serve a smaller number of users with the help of RIS technology. We consider imperfect channel state information (CSI), where each AP uses the local channel estimates obtained from the uplink pilots and applies conjugate beamforming for downlink data transmission. Additionally, we consider random beamforming at the RIS during both training and data transmission phases. This allows us to eliminate the need of estimating each RIS assisted link, which has been proven to be a challenging task in literature. We then derive a closed-form expression for the achievable rate and use it to evaluate the system's performance supported with numerical results. We show that the RIS provided array gain improves the system's coverage, and provides nearly a 2-fold increase in the minimum rate and a 1.5-fold increase in the per-user throughput. We also use the results to provide preliminary insights on the number of RISs that need to be used to replace an AP, while achieving similar performance as a typical CF-mMIMO system with dense AP deployment.
Communication-Efficient Robust Federated Learning Over Heterogeneous Datasets
Jun 17, 2020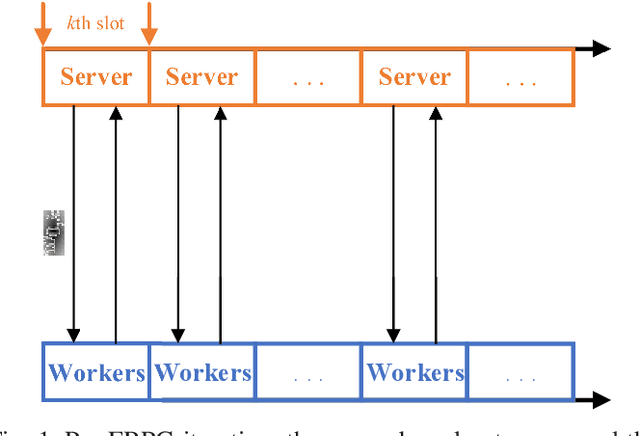
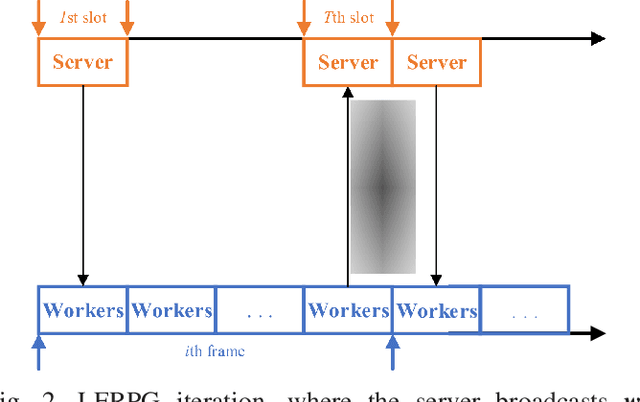
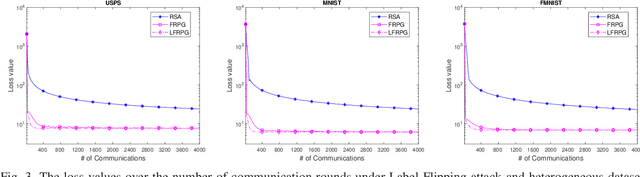
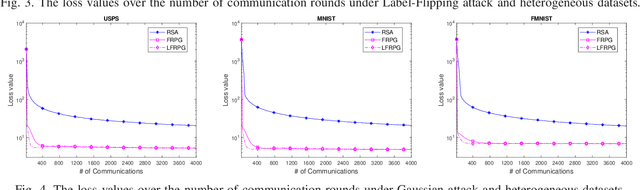
This work investigates fault-resilient federated learning when the data samples are non-uniformly distributed across workers, and the number of faulty workers is unknown to the central server. In the presence of adversarially faulty workers who may strategically corrupt datasets, the local messages exchanged (e.g., local gradients and/or local model parameters) can be unreliable, and thus the vanilla stochastic gradient descent (SGD) algorithm is not guaranteed to converge. Recently developed algorithms improve upon vanilla SGD by providing robustness to faulty workers at the price of slowing down convergence. To remedy this limitation, the present work introduces a fault-resilient proximal gradient (FRPG) algorithm that relies on Nesterov's acceleration technique. To reduce the communication overhead of FRPG, a local (L) FRPG algorithm is also developed to allow for intermittent server-workers parameter exchanges. For strongly convex loss functions, FRPG and LFRPG have provably faster convergence rates than a benchmark robust stochastic aggregation algorithm. Moreover, LFRPG converges faster than FRPG while using the same communication rounds. Numerical tests performed on various real datasets confirm the accelerated convergence of FRPG and LFRPG over the robust stochastic aggregation benchmark and competing alternatives.