 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Smart Helper Placement for Enhanced Cache Efficiency in F-RANs
Jan 28, 2025



Smart helpers (SHs) have been proposed to improve content delivery delays and alleviate high fronthaul loads in fog radio access networks (F-RANs). They offer an alternative to deploying additional enhanced remote radio heads (RRHs), which are often infeasible due to site constraints.} The optimal placement of SHs can significantly increase the number of users they serve which leads to enhanced cache efficiency and improved content delivery delay. In this letter, we optimize SH placement within an F-RAN to maximize the cache hit rate and further reduce the content delivery latency. We model the SH cache hit rate as a function of outage probability and user density distribution. We develop a function to estimate user density distribution leveraging the radial basis functions (RBFs) method and optimize SH placement utilizing the particle swarm optimization (PSO) algorithm. \an{Our} numerical results confirm the effectiveness of the proposed approach in maximizing the \an{SH cache hit rate}, thereby improving delivery delays and fronthaul loads of the network.
Channel Modeling for Ultraviolet Non-Line-of-Sight Communications Incorporating an Obstacle
Nov 08, 2024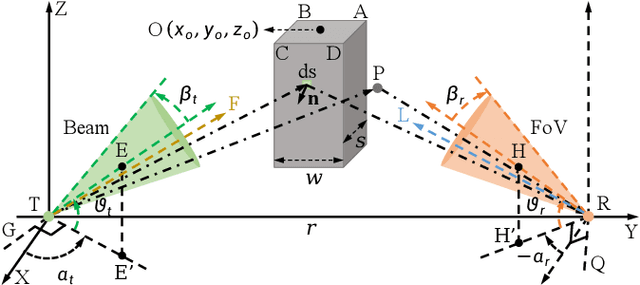
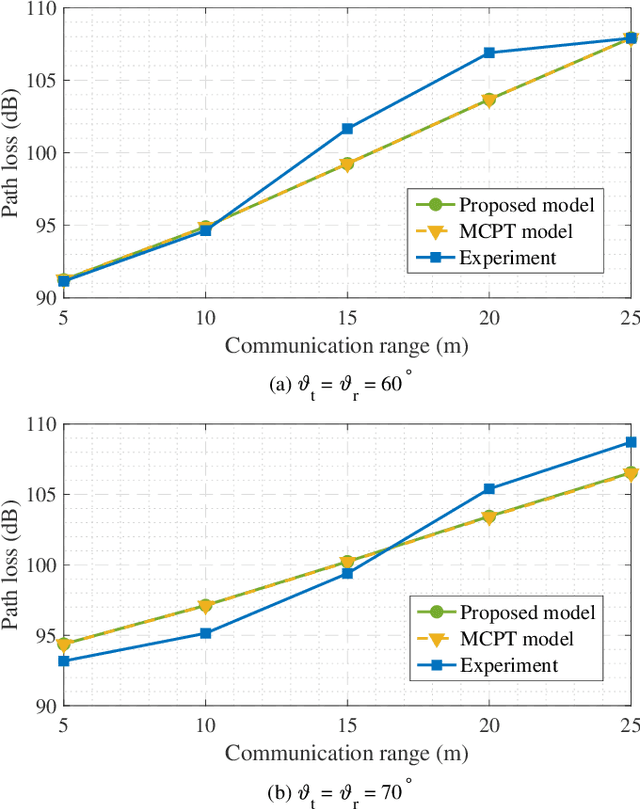
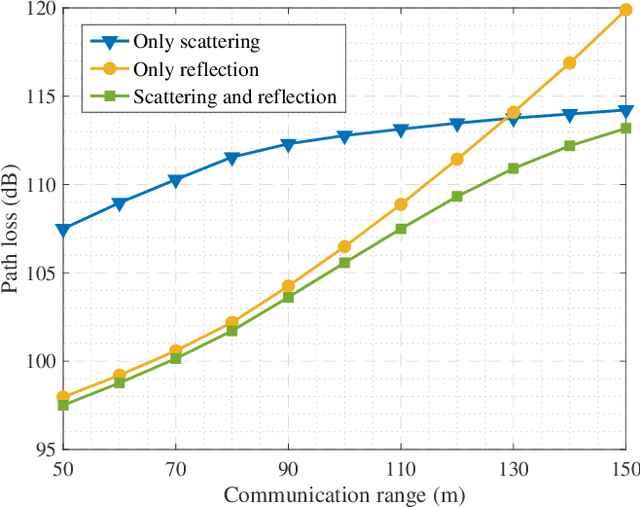
Existing studies on ultraviolet (UV) non-line-of-sight (NLoS) channel modeling primarily focus on scenarios without any obstacle, which makes them unsuitable for small transceiver elevation angles in most cases. To address this issue, a UV NLoS channel model incorporating an obstacle was investigated in this paper, where the impacts of atmospheric scattering and obstacle reflection on UV signals were both taken into account. To validate the proposed model, we compared it to the related Monte-Carlo photon-tracing (MCPT) model that had been verified by outdoor experiments. Numerical results manifest that the path loss curves obtained by the proposed model agree well with those determined by the MCPT model, while its computation complexity is lower than that of the MCPT model. This work discloses that obstacle reflection can effectively reduce the channel path loss of UV NLoS communication systems.
Single-Collision Model for Non-Line-of-Sight UV Communication Channel With Obstacle
Nov 08, 2024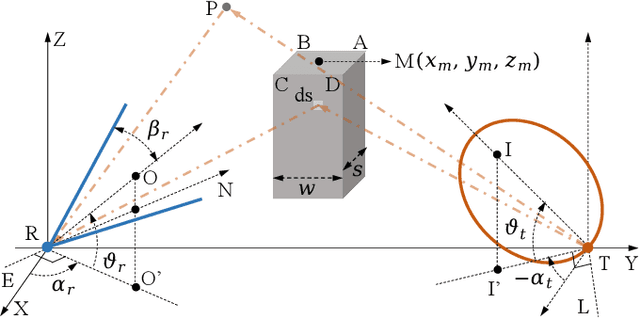
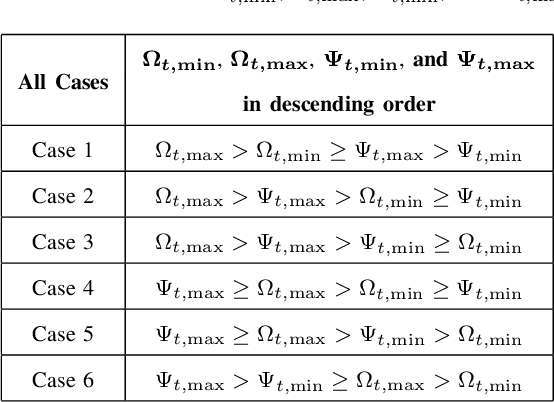
Existing research on non-line-of-sight (NLoS) ultraviolet (UV) channel modeling mainly focuses on scenarios where the signal propagation process is not affected by any obstacle and the radiation intensity (RI) of the light source is uniformly distributed. To eliminate these restrictions, we propose a single-collision model for the NLoS UV channel incorporating a cuboid-shaped obstacle, where the RI of the UV light source is modeled as the Lambertian distribution. For easy interpretation, we categorize the intersection circumstances between the receiver field-of-view and the obstacle into six cases and provide derivations of the weighting factor for each case. To investigate the accuracy of the proposed model, we compare it with the associated Monte Carlo photon tracing model via simulations and experiments. Results verify the correctness of the proposed model. This work reveals that obstacle avoidance is not always beneficial for NLoS UV communications and provides guidelines for relevant system design.
Modeling of UV NLoS Communication Channels: From Atmospheric Scattering and Obstacle Reflection Perspectives
Nov 08, 2024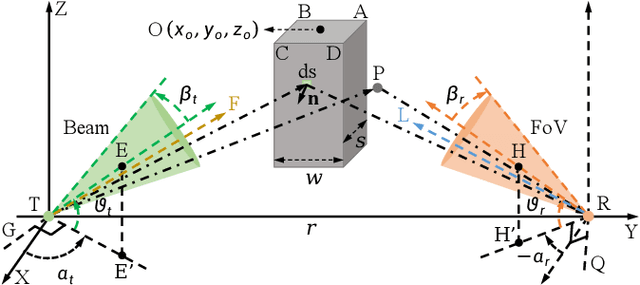
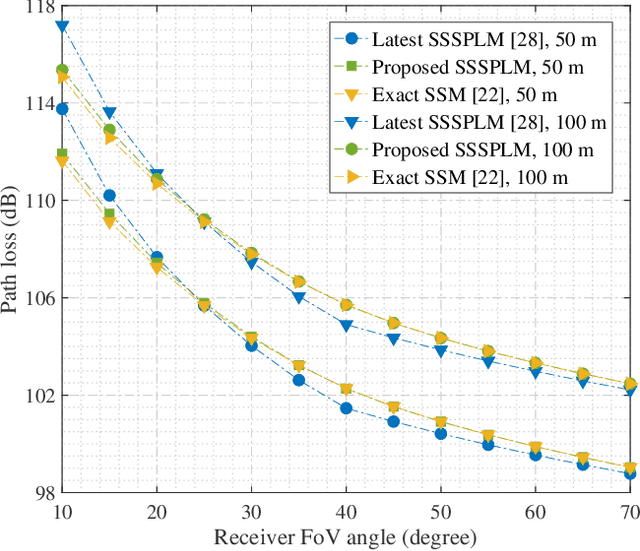
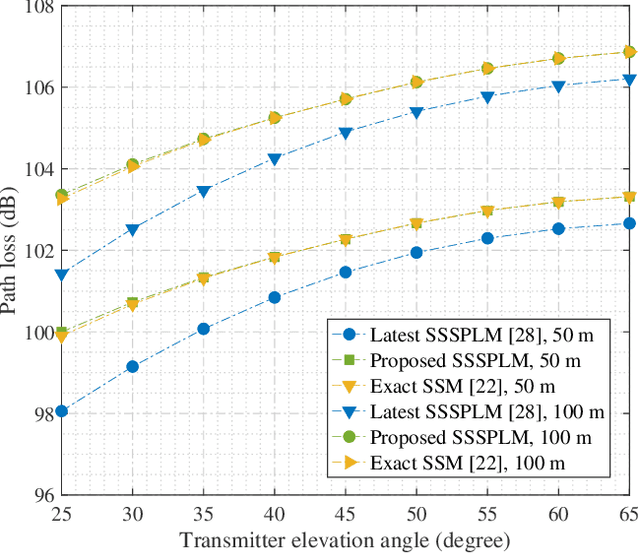
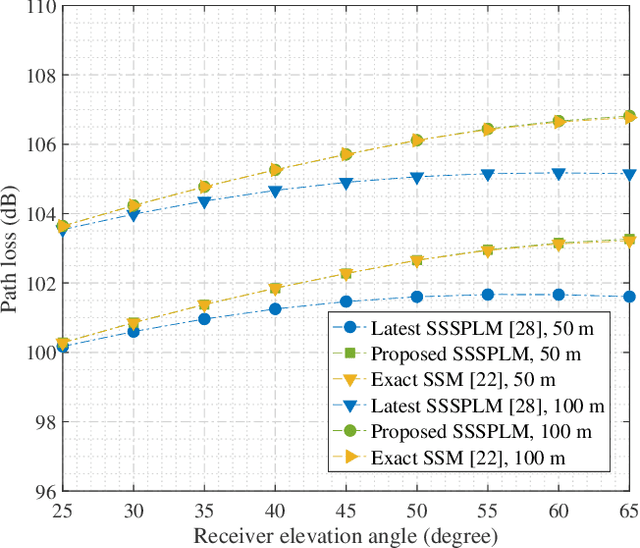
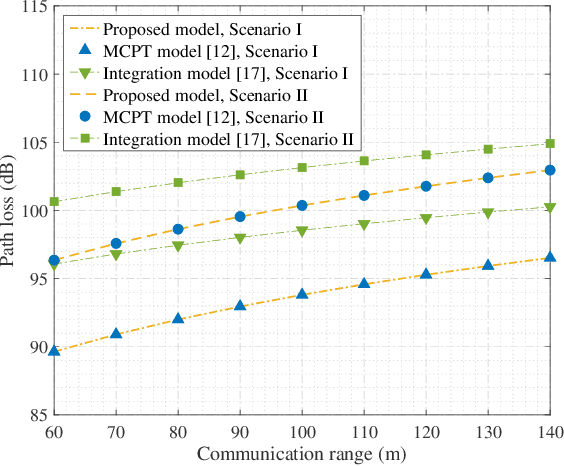
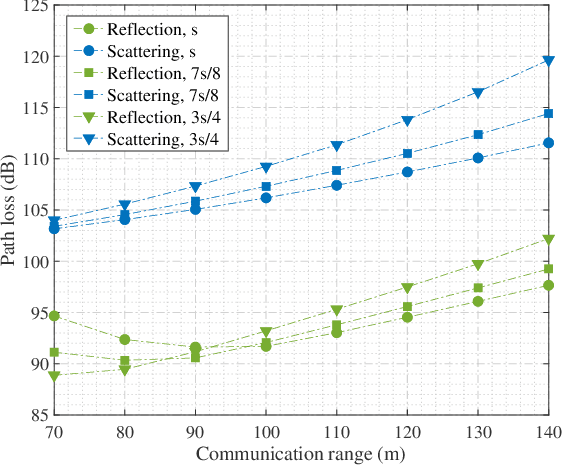
As transceiver elevation angles increase from small to large, existing ultraviolet (UV) non-line-of-sight (NLoS) models encounter two challenges: i) cannot estimate the channel characteristics of UV NLoS communication scenarios when there exists an obstacle in the overlap volume between the transmitter beam and the receiver field-of-view (FoV), and ii) cannot evaluate the channel path loss for the wide beam and wide FoV scenarios with existing simplified single-scattering path loss models. To address these challenges, a UV NLoS scattering model incorporating an obstacle was investigated, where the obstacle's orientation angle, coordinates, and geometric dimensions were taken into account to approach actual application environments. Then, a UV NLoS reflection model was developed combined with specific geometric diagrams. Further, a simplified single-scattering path loss model was proposed with a closed-form expression. Finally, the proposed models were validated by comparing them with the Monte-Carlo photon-tracing model, the exact single-scattering model, and the latest simplified single-scattering model. Numerical results show that the path loss curves obtained by the proposed models agree well with those attained by related NLoS models under identical parameter settings, and avoiding obstacles is not always a good option for UV NLoS communications. Moreover, the accuracy of the proposed simplified model is superior to that of the existing simplified model for all kinds of transceiver FoV angles.
Learned Trimmed-Ridge Regression for Channel Estimation in Millimeter-Wave Massive MIMO
Aug 06, 2024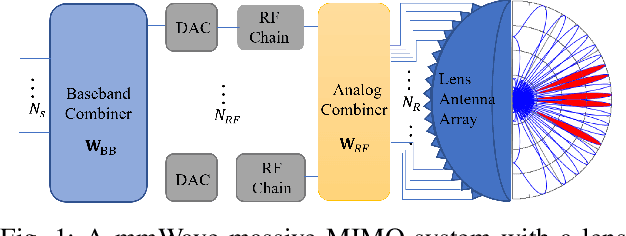
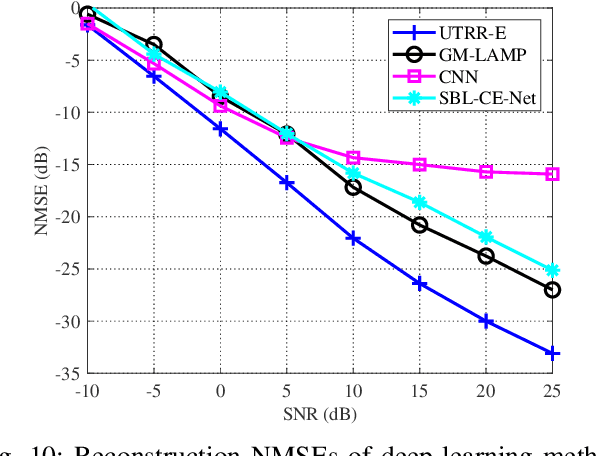
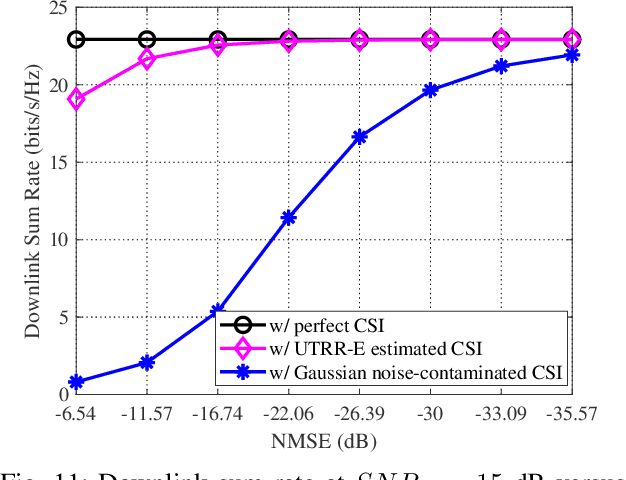
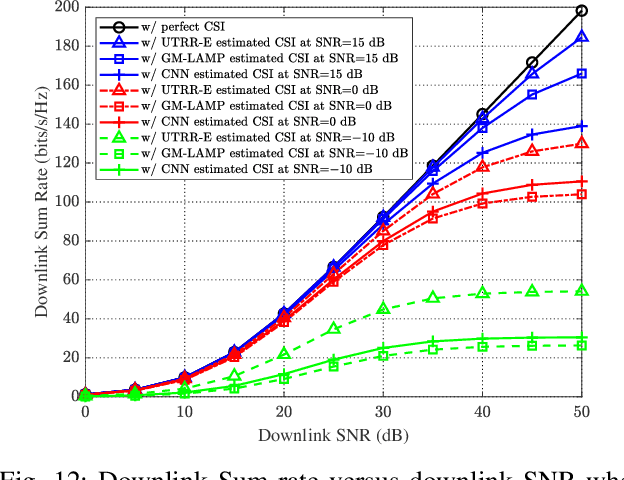
Channel estimation poses significant challenges in millimeter-wave massive multiple-input multiple-output systems, especially when the base station has fewer radio-frequency chains than antennas. To address this challenge, one promising solution exploits the beamspace channel sparsity to reconstruct full-dimensional channels from incomplete measurements. This paper presents a model-based deep learning method to reconstruct sparse, as well as approximately sparse, vectors fast and accurately. To implement this method, we propose a trimmed-ridge regression that transforms the sparse-reconstruction problem into a least-squares problem regularized by a nonconvex penalty term, and then derive an iterative solution. We then unfold the iterations into a deep network that can be implemented in online applications to realize real-time computations. To this end, an unfolded trimmed-ridge regression model is constructed using a structural configuration to reduce computational complexity and a model ensemble strategy to improve accuracy. Compared with other state-of-the-art deep learning models, the proposed learning scheme achieves better accuracy and supports higher downlink sum rates.
Positioning Using Wireless Networks: Applications, Recent Progress and Future Challenges
Mar 18, 2024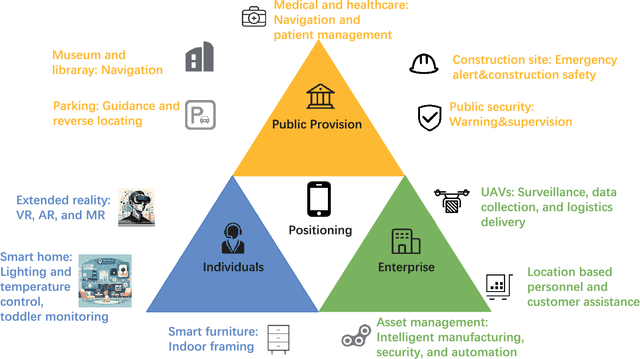
Positioning has recently received considerable attention as a key enabler in emerging applications such as extended reality, unmanned aerial vehicles and smart environments. These applications require both data communication and high-precision positioning, and thus they are particularly well-suited to be offered in wireless networks (WNs). The purpose of this paper is to provide a comprehensive overview of existing works and new trends in the field of positioning techniques from both the academic and industrial perspectives. The paper provides a comprehensive overview of positioning in WNs, covering the background, applications, measurements, state-of-the-art technologies and future challenges. The paper outlines the applications of positioning from the perspectives of public facilities, enterprises and individual users. We investigate the key performance indicators and measurements of positioning systems, followed by the review of the key enabler techniques such as artificial intelligence/large models and adaptive systems. Next, we discuss a number of typical wireless positioning technologies. We extend our overview beyond the academic progress, to include the standardization efforts, and finally, we provide insight into the challenges that remain. The comprehensive overview of exisitng efforts and new trends in the field of positioning from both the academic and industrial communities would be a useful reference to researchers in the field.
A Survey on Indoor Visible Light Positioning Systems: Fundamentals, Applications, and Challenges
Jan 25, 2024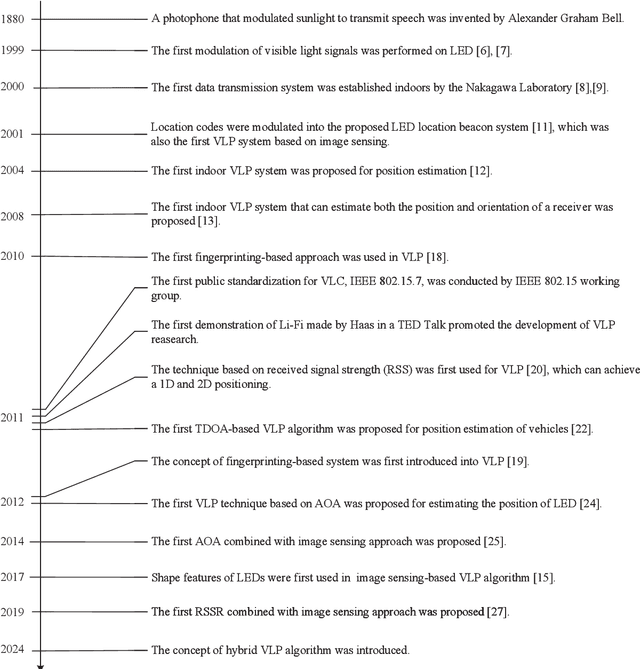
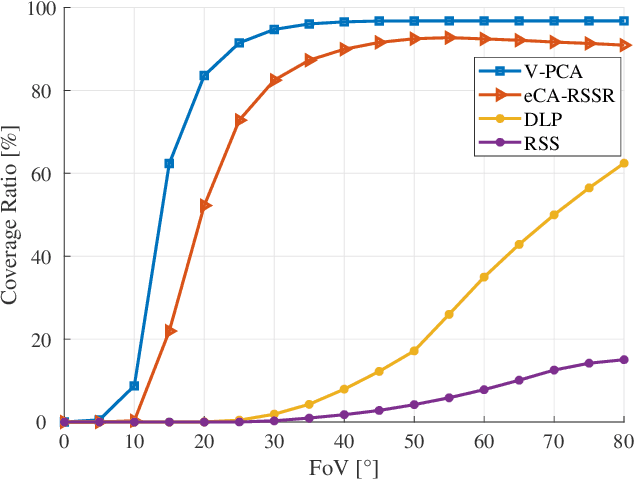
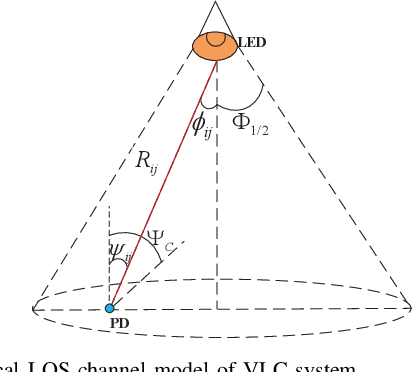
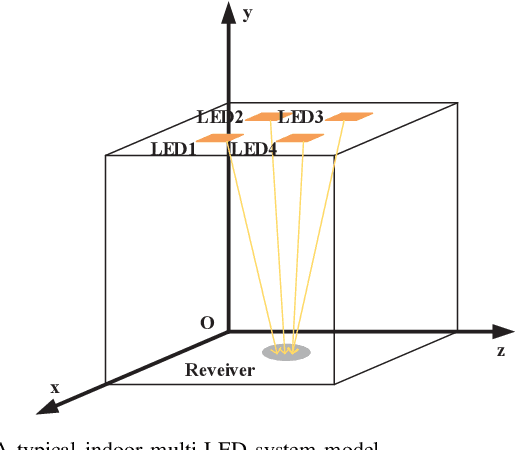
The growing demand for location-based services in areas like virtual reality, robot control, and navigation has intensified the focus on indoor localization. Visible light positioning (VLP), leveraging visible light communications (VLC), becomes a promising indoor positioning technology due to its high accuracy and low cost. This paper provides a comprehensive survey of VLP systems. In particular, since VLC lays the foundation for VLP, we first present a detailed overview of the principles of VLC. The performance of each positioning algorithm is also compared in terms of various metrics such as accuracy, coverage, and orientation limitation. Beyond the physical layer studies, the network design for a VLP system is also investigated, including multi-access technologies resource allocation, and light-emitting diode (LED) placements. Next, the applications of the VLP systems are overviewed. Finally, this paper outlines open issues, challenges, and future research directions for the research field. In a nutshell, this paper constitutes the first holistic survey on VLP from state-of-the-art studies to practical uses.
Performance Analysis of Cell-Free Massive MIMO Systems with Asynchronous Reception
Oct 17, 2022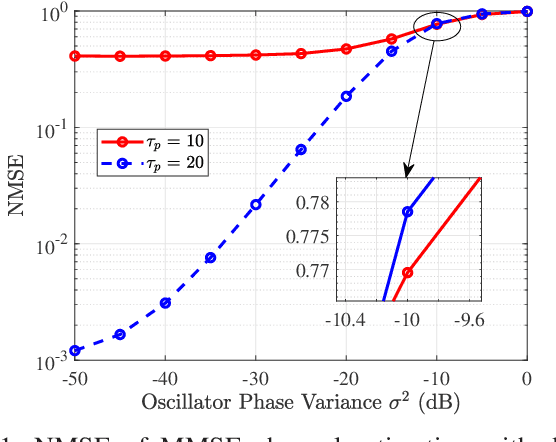
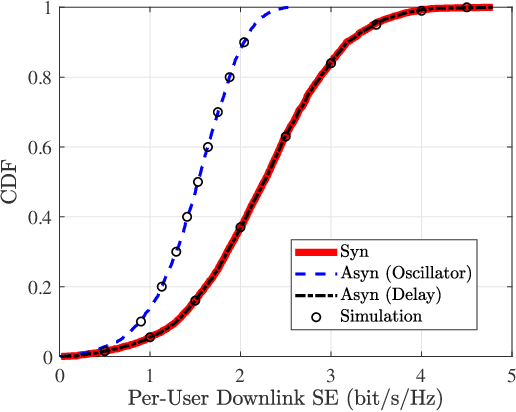
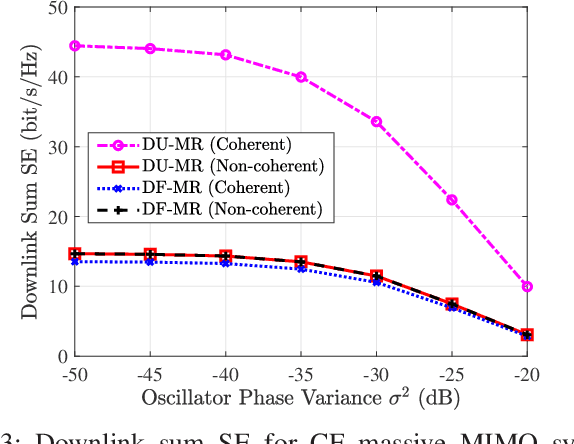
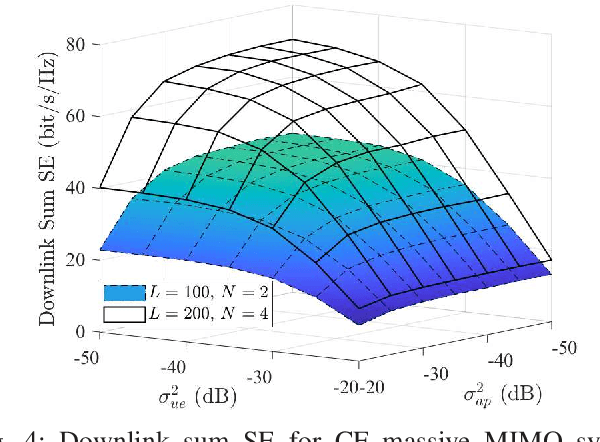
Cell-free (CF) massive multiple-input multiple-output (MIMO) is considered as a promising technology for achieving the ultimate performance limit. However, due to its distributed architecture and low-cost access points (APs), the signals received at user equipments (UEs) are most likely asynchronous. In this paper, we investigate the performance of CF massive MIMO systems with asynchronous reception, including both effects of delay and oscillator phases. Taking into account the imperfect channel state information caused by phase asynchronization and pilot contamination, we obtain novel and closed-form downlink spectral efficiency (SE) expressions with coherent and non-coherent data transmission schemes, respectively. Simulation results show that asynchronous reception destroys the orthogonality of pilots and coherent transmission of data, and thus results in poor system performance. In addition, getting a highly accurate delay phase is substantial for CF massive MIMO systems to achieve coherent transmission gain. Moreover, the oscillator phase of UEs has a larger effect on SE than that of the APs, because the latter can be significantly reduced by increasing the number of antennas.
Federated Deep Reinforcement Learning for RIS-Assisted Indoor Multi-Robot Communication Systems
Jul 17, 2022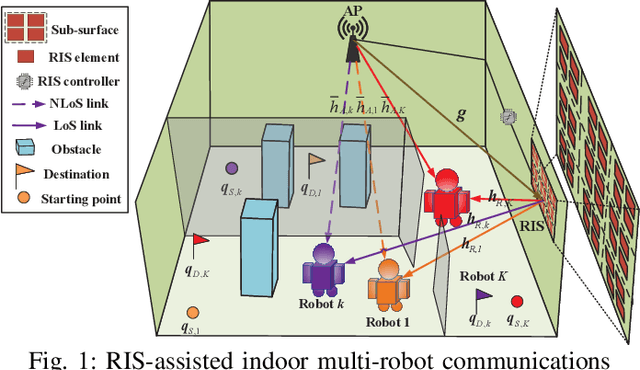
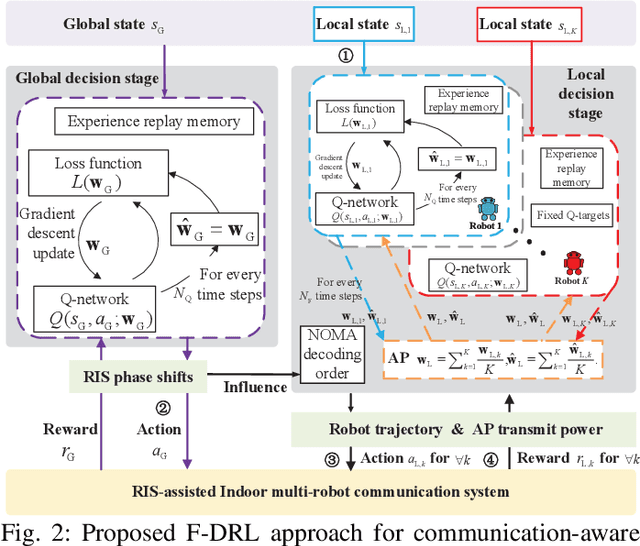
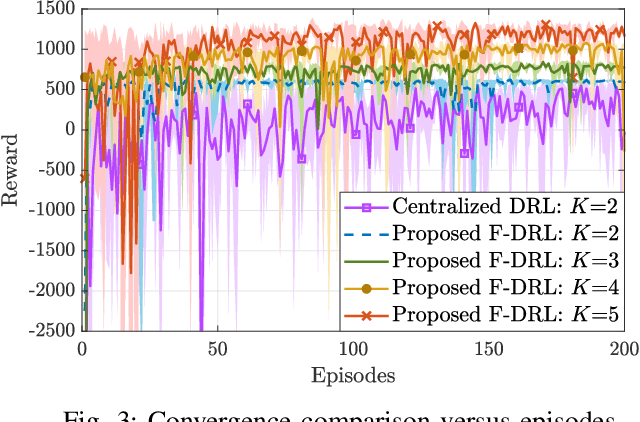
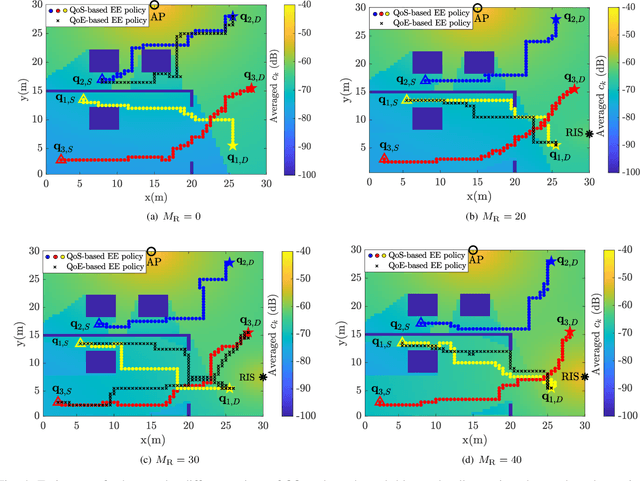
Indoor multi-robot communications face two key challenges: one is the severe signal strength degradation caused by blockages (e.g., walls) and the other is the dynamic environment caused by robot mobility. To address these issues, we consider the reconfigurable intelligent surface (RIS) to overcome the signal blockage and assist the trajectory design among multiple robots. Meanwhile, the non-orthogonal multiple access (NOMA) is adopted to cope with the scarcity of spectrum and enhance the connectivity of robots. Considering the limited battery capacity of robots, we aim to maximize the energy efficiency by jointly optimizing the transmit power of the access point (AP), the phase shifts of the RIS, and the trajectory of robots. A novel federated deep reinforcement learning (F-DRL) approach is developed to solve this challenging problem with one dynamic long-term objective. Through each robot planning its path and downlink power, the AP only needs to determine the phase shifts of the RIS, which can significantly save the computation overhead due to the reduced training dimension. Simulation results reveal the following findings: I) the proposed F-DRL can reduce at least 86% convergence time compared to the centralized DRL; II) the designed algorithm can adapt to the increasing number of robots; III) compared to traditional OMA-based benchmarks, NOMA-enhanced schemes can achieve higher energy efficiency.
* The paper has been accepted for publication in the IEEE Transactions on Vehicular Technology
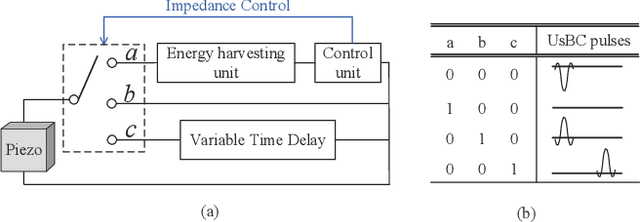
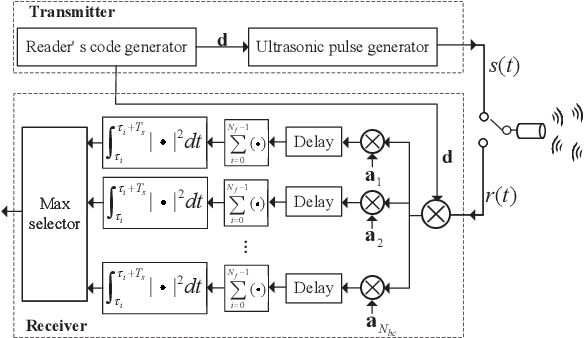
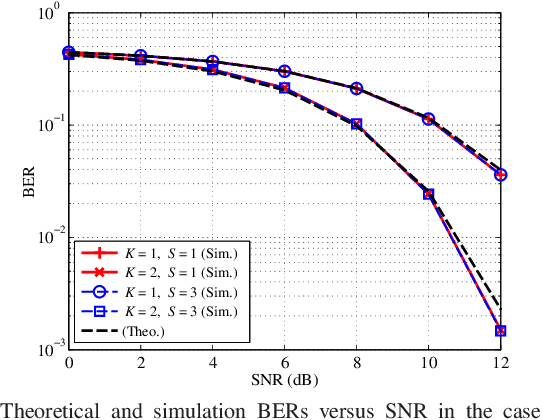
Ultrasonic Backscatter Communication for Implantable Medical Devices
Feb 14, 2022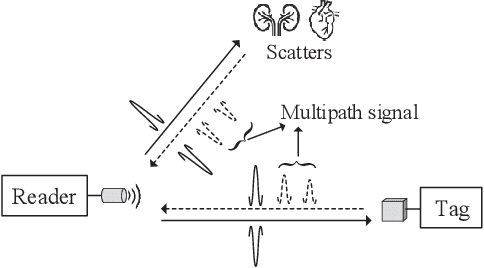
This paper proposes an ultrasonic backscatter communication (UsBC) system for passive implantable medical devices (IMDs) that can operate without batteries, enabling versatile revolutionary applications for future healthcare. The proposed UsBC system consists of a reader and a tag. The reader sends interrogation pulses to the tag. The tag backscatters the pulses based on the piezoelectric effect of a piezo transducer. We present several basic modulation schemes for UsBC by impedance matching of the piezo transducer. To mitigate the interference of other scatters in the human body, the tag transmits information bits by codeword mapping, and the reader performs codeword matching before energy detection in the reader. We further derive the theoretical bit-error rate (BER) expression. Monte Carlo simulations verify the theoretical analysis and show that passive UsBC can achieve low BER and low complexity, which is desirable for size- and energy-constrained IMDs.