 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Performance Analysis of Doppler-Based Positioning with a Single LEO Satellite
Mar 19, 2026Low Earth Orbit (LEO) satellites have gained increasing attention as potential signal sources for Positioning, Navigation and Timing (PNT) applications. However, while most existing studies focus on multi-satellite LEO constellations, the fundamental positioning performance achievable with a single LEO satellite remains less extensively explored. This paper analyzes the geometric characteristics and positioning performance of single-satellite Doppler positioning through a theoretical analysis of the Dilution of Precision (DOP) and extensive numerical simulations. The results reveal a strong directional error behavior, with severe error in the cross-track direction but a significantly less error along the satellite track, reflecting an intrinsic geometric limitation of single-satellite LEO positioning. While these features were already identified at the early stages of satellite PNT missions, the present work provides an in-depth analysis and unveils the fundamental limitations and characteristics that could make LEO-based Doppler positioning feasible nowadays, using one single satellite only. In this way, the results of this work not only provide valuable insights into the role of observational geometry in Doppler navigation, but also offer guidance for optimizing geometric configurations in future small or single-satellite LEO constellations for strategic applications.
Optimal Placement of Movable Antennas for Angle-of-Departure Estimation Under User Location Uncertainty
Jan 29, 2026Movable antennas (MA) have gained significant attention in recent years to overcome the limitations of extremely large antenna arrays in terms of cost and power consumption. In this paper, we investigate the use of MA arrays at the base station (BS) for angle-of-departure (AoD) estimation under uncertainty in the user equipment (UE) location. Specifically, we (i) derive the theoretical performance limits through the Cramér-Rao bound (CRB) and (ii) optimize the antenna positions to ensure robust performance within the UE's uncertainty region. Numerical results show that dynamically optimizing antenna placement by explicitly considering the uncertainty region yields superior performance compared to fixed arrays, demonstrating the ability of MA systems to adapt and outperform conventional arrays.
Multi-band Carrier Phase Positioning toward 6G: Performance Bounds and Efficient Estimators
Jan 08, 2026In addition to satellite systems, carrier phase positioning (CPP) is gaining attraction also in terrestrial mobile networks, particularly in 5G New Radio evolution toward 6G. One key challenge is to resolve the integer ambiguity problem, as the carrier phase provides only relative position information. This work introduces and studies a multi-band CPP scenario with intra- and inter-band carrier aggregation (CA) opportunities across FR1, mmWave-FR2, and emerging 6G FR3 bands. Specifically, we derive multi-band CPP performance bounds, showcasing the superiority of multi-band CPP for high-precision localization in current and future mobile networks, while noting also practical imperfections such as clock offsets between the user equipment (UE) and the network as well as mutual clock imperfections between the network nodes. A wide collection of numerical results is provided, covering the impacts of the available carrier bandwidth, number of aggregated carriers, transmit power, and the number of network nodes or base stations. The offered results highlight that only two carriers suffice to substantially facilitate resolving the integer ambiguity problem while also largely enhancing the robustness of positioning against imperfections imposed by the network-side clocks and multi-path propagation. In addition, we also propose a two-stage practical estimator that achieves the derived bounds under all realistic bandwidth and transmit power conditions. Furthermore, we show that with an additional search-based refinement step, the proposed estimator becomes particularly suitable for narrowband Internet of Things applications operating efficiently even under narrow carrier bandwidths. Finally, both the derived bounds and the proposed estimators are extended to scenarios where the bands assigned to each base station are nonuniform or fully disjoint, enhancing the practical deployment flexibility.
LEO Constellations as a Decentralized GNSS Network: Optimizing PNT Corrections in Space
Dec 24, 2025
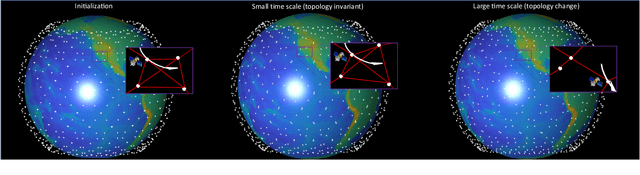
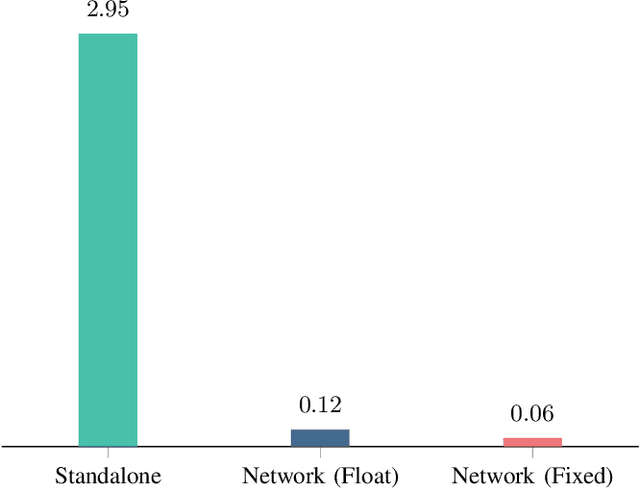
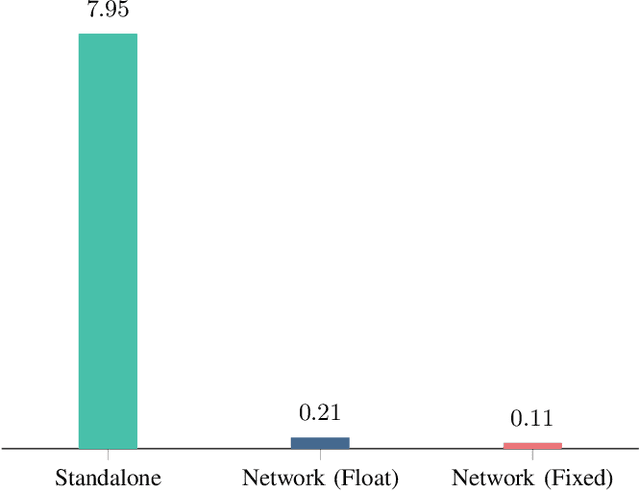
With the rapid expansion of low Earth orbit (LEO) constellations, thousands of satellites are now in operation, many equipped with onboard GNSS receivers capable of continuous orbit determination and time synchronization. This development is creating an unprecedented spaceborne GNSS network, offering new opportunities for network-driven precise LEO orbit and clock estimation. Yet, current onboard GNSS processing is largely standalone and often insufficient for high-precision applications, while centralized fusion is challenging due to computational bottlenecks and the lack of in-orbit infrastructure. In this work, we report a decentralized GNSS network over large-scale LEO constellations, where each satellite processes its own measurements while exchanging compact information with neighboring nodes to enable precise orbit and time determination. We model the moving constellation as a dynamic graph and tailor a momentum-accelerated gradient tracking (GT) method to ensure steady convergence despite topology changes. Numerical simulations with constellations containing hundreds of satellites show that the proposed method matches the accuracy of an ideal centralized benchmark, while substantially reducing communication burdens. Ultimately, this framework supports the development of autonomous and self-organizing space systems, enabling high-precision navigation with reduced dependence on continuous ground contact.
POLO: Phase-Only Localization in Uplink Distributed MIMO Systems
Dec 10, 2025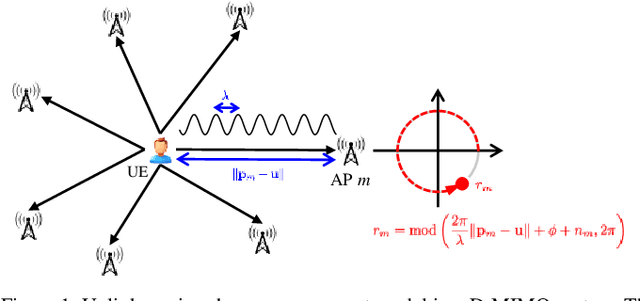

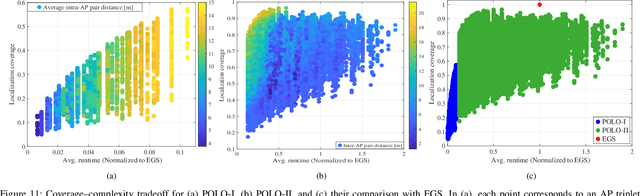
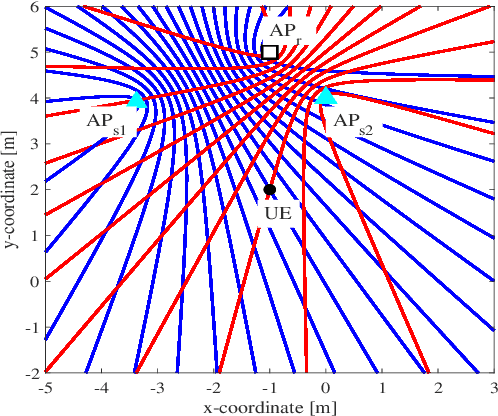
We propose a low-complexity localization framework for uplink distributed MIMO (D-MIMO) systems, targeting the challenge of minimizing the highly spiky maximum-likelihood (ML) cost function that arises in sparsely deployed phasecoherent access points (APs) with narrowband transmission. In such systems, ML-based localization typically relies on dense grid search, incurring prohibitive computational complexity. To address this, we introduce phase-only localization (POLO), an approach that leverages differential carrier-phase measurements from selected APs to generate a compact set of candidate user positions. The ML cost function is then evaluated only at these candidates, reducing complexity significantly. A key challenge is to devise an AP selection mechanism that reduces the number of candidate points while maintaining reliable coverage. We propose two variants: POLO-I, which selects three APs to provide closed-form candidate positions with low computational cost, and POLO-II, which selects four APs using an alternative strategy that enhances coverage at marginally higher runtime. Comprehensive analytical and simulation results show that POLO achieves a favorable coverage-complexity trade-off, reducing cost by orders of magnitude relative to exhaustive grid search with only marginal loss in coverage. By characterizing this tradeoff under diverse AP configurations, we also provide practical guidelines for selecting between POLO-I and POLO-II depending on latency and coverage requirements.
Fundamental Limits of Rigid Body Localization
Jul 30, 2025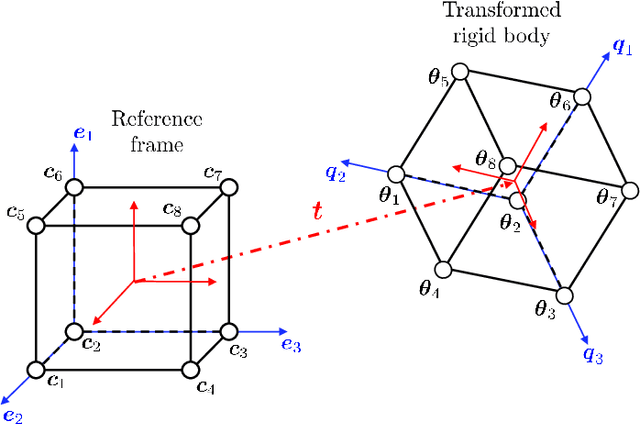
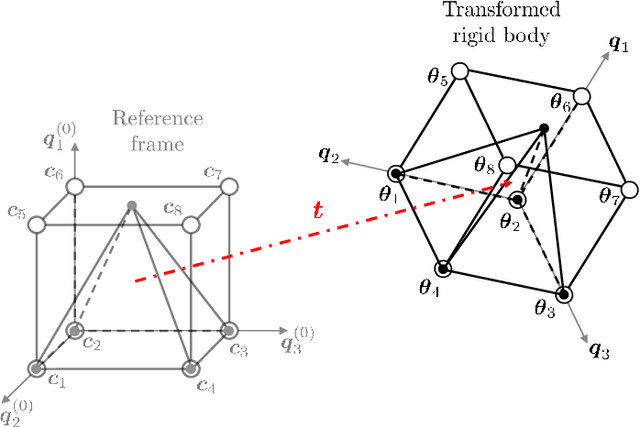
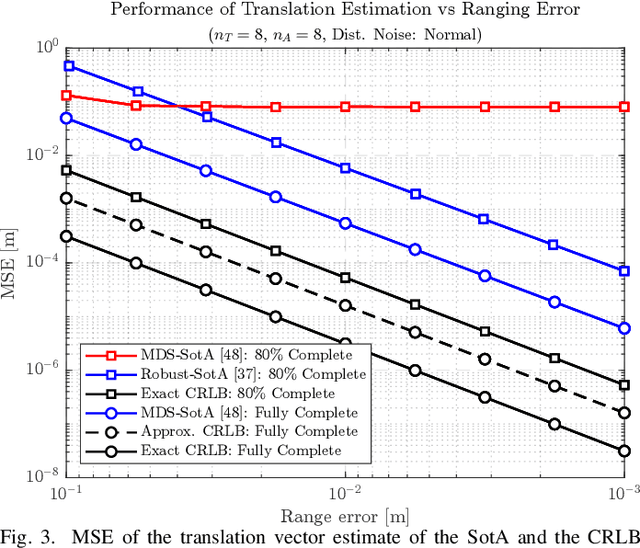
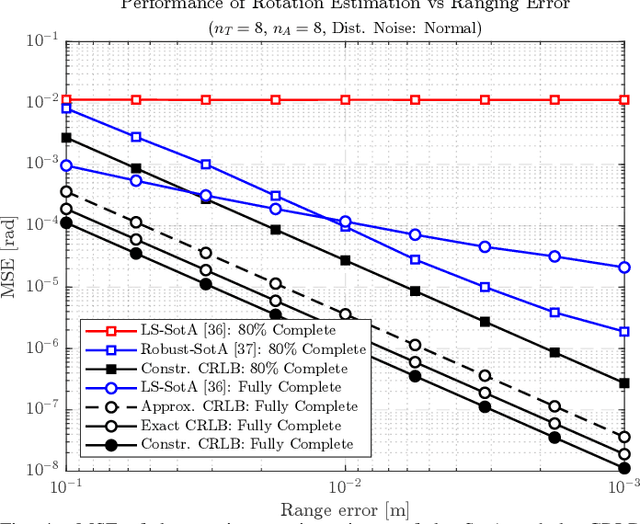
We consider a novel approach to formulate the Cram\'er-Rao Lower Bound (CRLB) for the rigid body localization (RBL) problem, which allows us to assess the fundamental accuracy limits on the estimation of the translation and rotation of a rigid body with respect to a known reference. To that end, we adopt an information-centric construction of the Fisher information matrix (FIM), which allows to capture the contribution of each measurement towards the FIM, both in terms of input measurement types, as well as of their error distributions. Taking advantage of this approach, we derive a generic framework for the CRLB formulation, which is applicable to any type of rigid body localization scenario, extending the conventional FIM formulation suitable for point targets to the case of a rigid body whose location include both translation vector and the rotation matrix (or alternative the rotation angles), with respect to a reference. Closed-form expressions for all CRLBs are given, including the bound incorporating an orthonormality constraint onto the rotation matrix. Numerical results illustrate that the derived expression correctly lower-bounds the errors of estimated localization parameters obtained via various related state-of-the-art (SotA) estimators, revealing their accuracies and suggesting that SotA RBL algorithms can still be improved.
Theoretical and Experimental Evaluation of AoA Estimation in Single-Anchor 5G Uplink Positioning
Jun 08, 2025As we move towards 6G, the demand for high-precision, cost-effective positioning solutions becomes increasingly critical. Single-anchor positioning offers a promising alternative to traditional multi-anchor approaches, particularly in complex propagation environments where infrastructure costs and deployment constraints present significant challenges. This paper provides a comprehensive evaluation of key algorithmic choices in the development of a single-anchor 5G uplink positioning testbed. Our developed testbed uses angle of arrival (AoA) estimation combined with range measurements from an ultra-wideband pair, to derive the position. The simulations conducted assess the impact of the selected algorithms on channel order and AoA estimation, while the influence of antenna calibration errors on AoA estimation is also examined. Finally, we compare simulations and results obtained from our developed platform.
Joint Localization and Synchronization in Downlink Distributed MIMO
Apr 14, 2025



We investigate joint localization and synchronization in the downlink of a distributed multiple-input-multiple-output (D-MIMO) system, aiming to estimate the position and phase offset of a single-antenna user equipment (UE) using downlink transmissions of multiple phase-synchronized, multi-antenna access points (APs). We propose two transmission protocols: sequential (P1) and simultaneous (P2) AP transmissions, together with the ML estimators that either leverage (coherent estimator) or disregard phase information (non-coherent estimator). Simulation results reveal that downlink D-MIMO holds significant potential for high-accuracy localization while showing that P2 provides superior localization performance and reduced transmission latency.
Angle of Arrival Estimation Using SRS in 5G NR Uplink Scenarios
Nov 25, 2024



This paper presents a comprehensive exploration of Angle of Arrival (AoA) estimation techniques in 5G environments, using the Sounding Reference Signal (SRS) in Uplink scenarios both in simulations and with actual measurements. Leveraging 5G capabilities, we investigate AoA algorithms for single-base station positioning. The study includes simulations and practical tests on a developed dedicated testbed featuring a base station equipped with a three-element Uniform Linear Array (ULA), considering Line of Sight conditions in an open environment. The testbed, employing Ettus E312 as the transmitter and Ettus N310 as the receiver, details waveform structures and reception processes. Additionally, our study examines the performance of Angle of Arrival (AoA) estimation algorithms, such as Multiple Signal Classification (MUSIC), Estimation of Signal Parameters via Rotational Invariant Techniques (ESPRIT), and Joint Angle and Delay Estimation (JADE) ESPRIT. A MATLAB ray tracing propagation model of the environment where the measurements are conducted, has been constructed. Simulation results using this model are presented, along with the actual measurements. The obtained results affirm the effectiveness of our implementation.
USRP-Based Single Anchor Positioning: AoA with 5G Uplink Signals, and UWB Ranging
Nov 25, 2024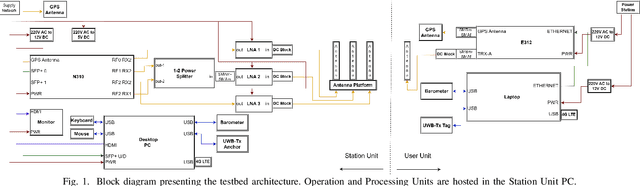
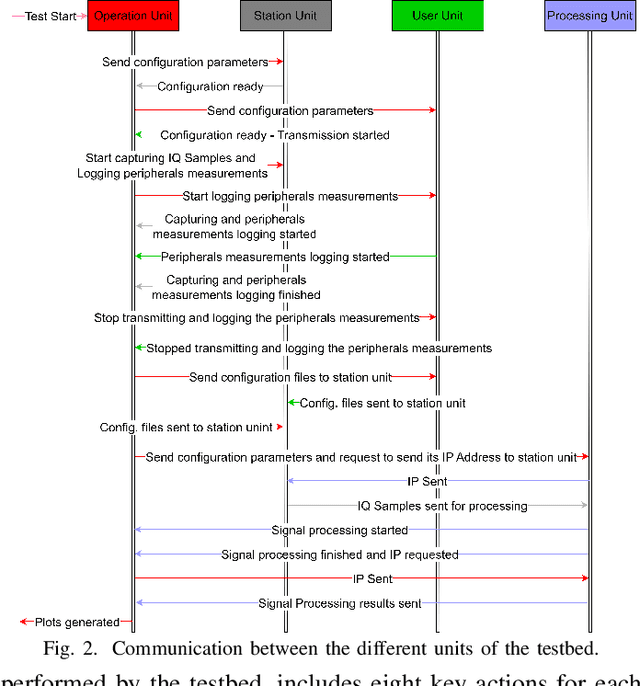
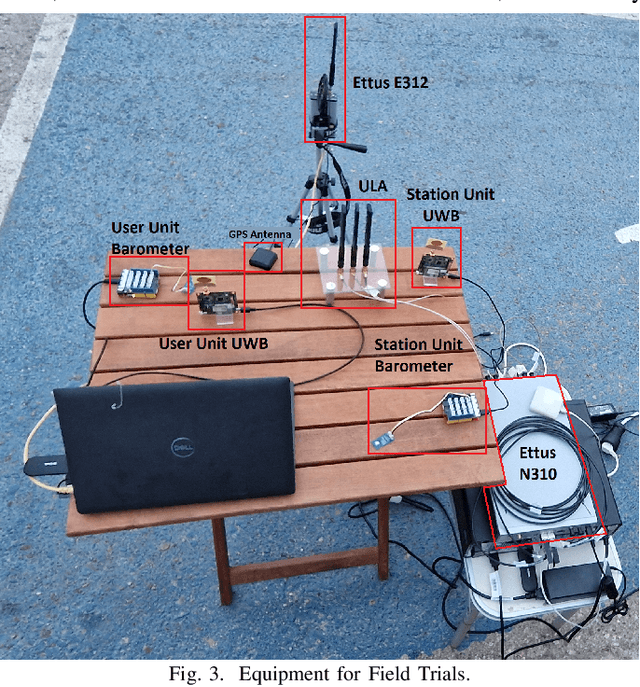
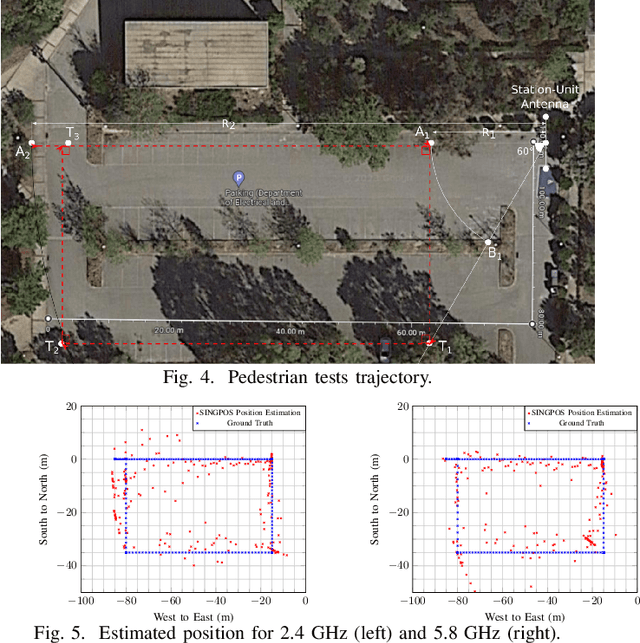
This paper presents a novel testbed designed for 5th-Generation (5G) positioning using Universal Software Radio Peripherals (USRPs). The testbed integrates multiple units: an Operation Unit for test management, a User Unit equipped with an Ettus E312 USRP, and a Station Unit featuring an Ettus N310 USRP equipped with a three-element Uniform Linear Array for Angle of Arrival estimation. Alongside ultra wideband ranging, the testbed estimates the user's position relative to the base station. Signal processing algorithms are executed in a dedicated processing unit. Key challenges addressed include phase misalignment between RX channel pairs due to different Local Oscillators in the Ettus N310, necessitating real-time calibration for precise signal alignment. High sampling rates (up to 61.44 MSps) result in large IQ sample files, managed efficiently using a snapshot technique to optimize storage without compromising testbed positioning capabilities. The testbed synchronizes angular measurements with ranging estimates allowing consistent performance evaluation for real-life cases of dynamic users (e.g. pedestrian). Experimental results demonstrate the testbed's effectiveness in achieving accurate pedestrian user localization.