 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePriority-Driven Safe Model Predictive Control Approach to Autonomous Driving Applications
May 09, 2025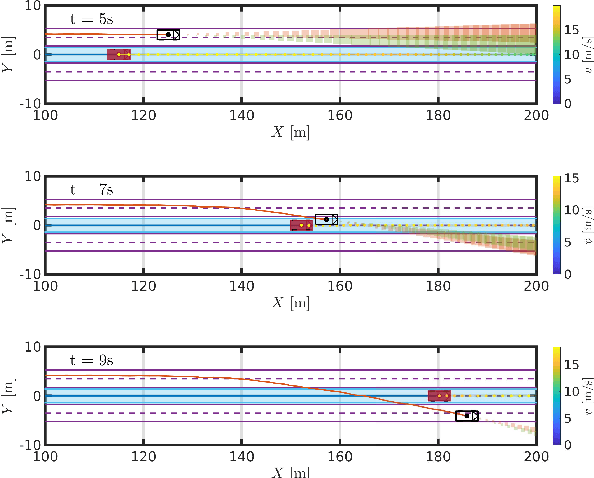
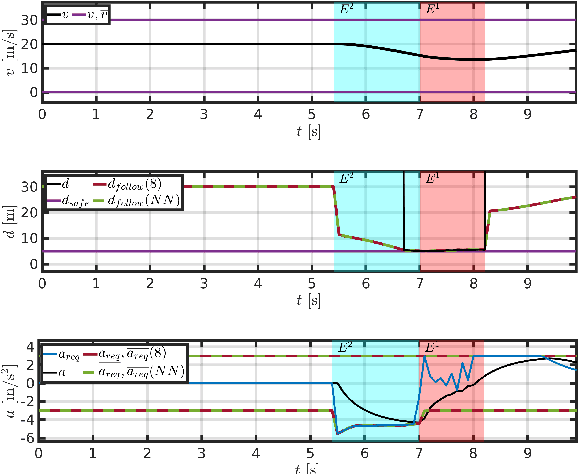
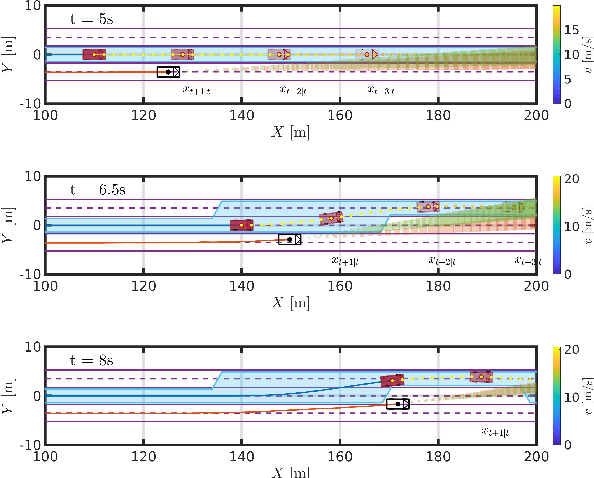
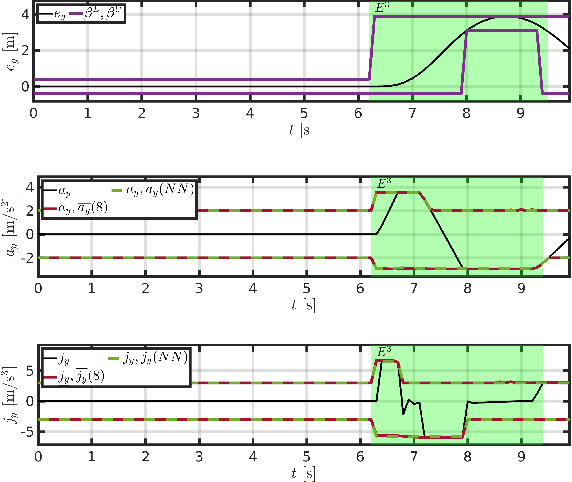
This paper demonstrates the applicability of the safe model predictive control (SMPC) framework to autonomous driving scenarios, focusing on the design of adaptive cruise control (ACC) and automated lane-change systems. Building on the SMPC approach with priority-driven constraint softening -- which ensures the satisfaction of \emph{hard} constraints under external disturbances by selectively softening a predefined subset of adjustable constraints -- we show how the algorithm dynamically relaxes lower-priority, comfort-related constraints in response to unexpected disturbances while preserving critical safety requirements such as collision avoidance and lane-keeping. A learning-based algorithm approximating the time consuming SMPC is introduced to enable real-time execution. Simulations in real-world driving scenarios subject to unpredicted disturbances confirm that this prioritized softening mechanism consistently upholds stringent safety constraints, underscoring the effectiveness of the proposed method.
Improving 3D Cellular Positioning Integrity with Bayesian RAIM
Aug 09, 2024
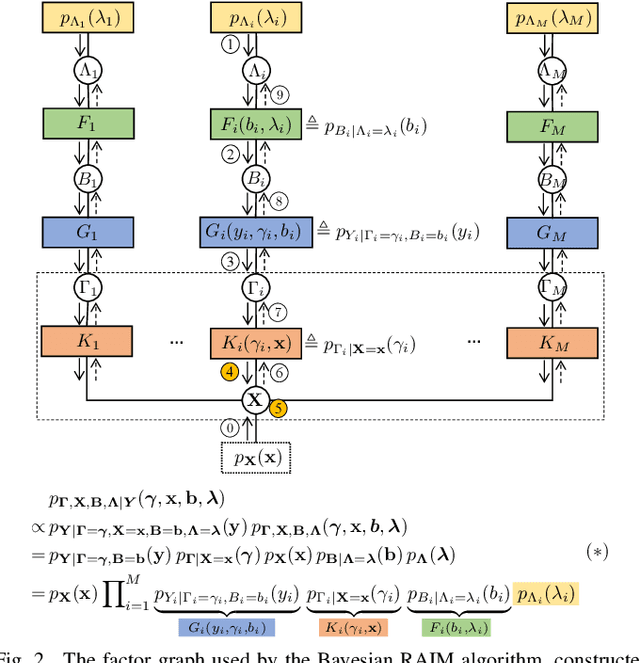
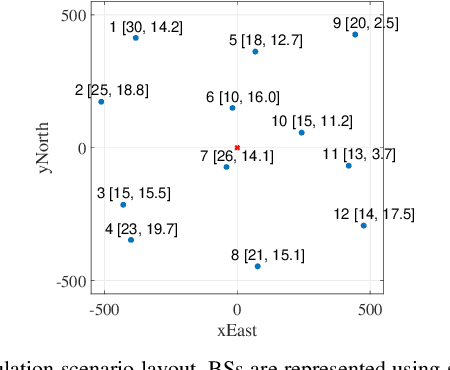
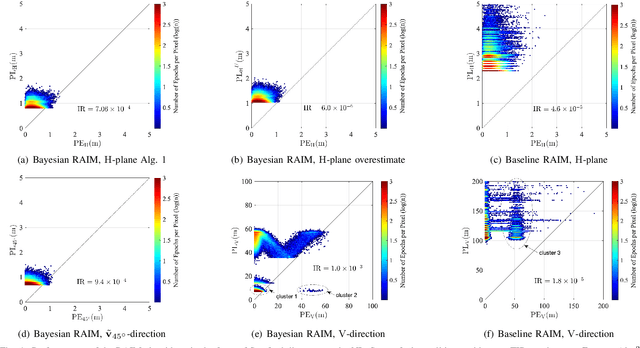
Ensuring positioning integrity amid faulty measurements is crucial for safety-critical applications, making receiver autonomous integrity monitoring (RAIM) indispensable. This paper introduces a Bayesian RAIM algorithm with a streamlined architecture for snapshot-type 3D cellular positioning. Unlike traditional frequentist-type RAIM algorithms, it computes the exact posterior probability density function (PDF) of the position vector as a Gaussian mixture (GM) model using efficient message passing along a factor graph. This Bayesian approach retains all crucial information from the measurements, eliminates the need to discard faulty measurements, and results in tighter protection levels (PLs) in 3D space and 1D/2D subspaces that meet target integrity risk (TIR) requirements. Numerical simulations demonstrate that the Bayesian RAIM algorithm significantly outperforms a baseline algorithm, achieving over $50\%$ PL reduction at a comparable computational cost.
Bayesian Integrity Monitoring for Cellular Positioning -- A Simplified Case Study
Nov 14, 2022



Bayesian receiver autonomous integrity monitoring (RAIM) algorithms are developed for the snapshot cellular positioning problem in a simplified one-dimensional (1D) linear Gaussian setting. Position estimation, multi-fault detection and exclusion, and protection level (PL) computation are enabled by the efficient and exact computation of the position posterior probabilities via message passing along a factor graph. Computer simulations demonstrate the significant performance improvement of the proposed Bayesian RAIM algorithms over a baseline advanced RAIM algorithm, as it obtains tighter PLs that meet the target integrity risk (TIR) requirements.
Reinforcement Learning with Uncertainty Estimation for Tactical Decision-Making in Intersections
Jun 17, 2020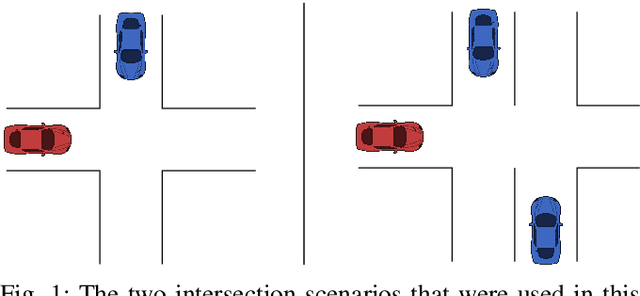
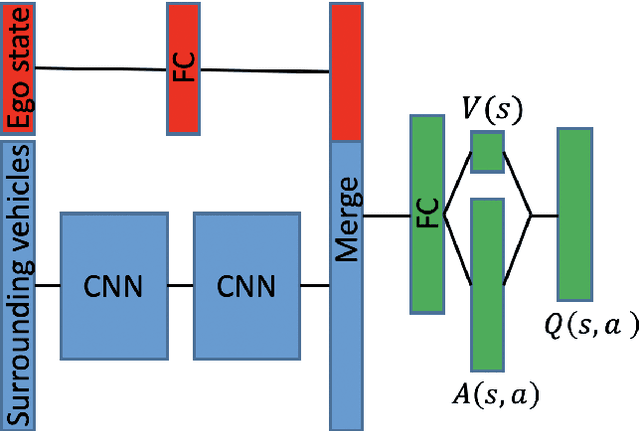
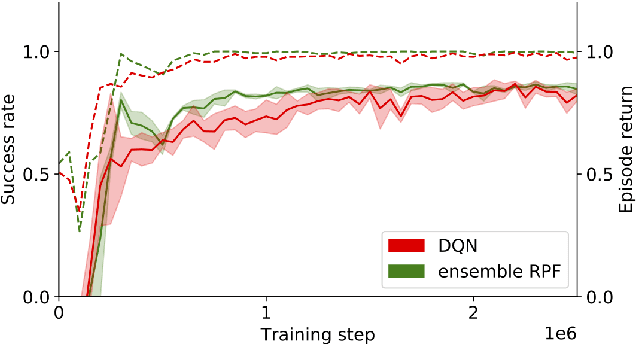
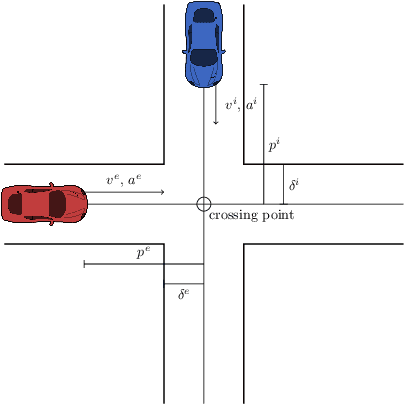
This paper investigates how a Bayesian reinforcement learning method can be used to create a tactical decision-making agent for autonomous driving in an intersection scenario, where the agent can estimate the confidence of its recommended actions. An ensemble of neural networks, with additional randomized prior functions (RPF), are trained by using a bootstrapped experience replay memory. The coefficient of variation in the estimated $Q$-values of the ensemble members is used to approximate the uncertainty, and a criterion that determines if the agent is sufficiently confident to make a particular decision is introduced. The performance of the ensemble RPF method is evaluated in an intersection scenario, and compared to a standard Deep Q-Network method. It is shown that the trained ensemble RPF agent can detect cases with high uncertainty, both in situations that are far from the training distribution, and in situations that seldom occur within the training distribution. In this study, the uncertainty information is used to choose safe actions in unknown situations, which removes all collisions from within the training distribution, and most collisions outside of the distribution.
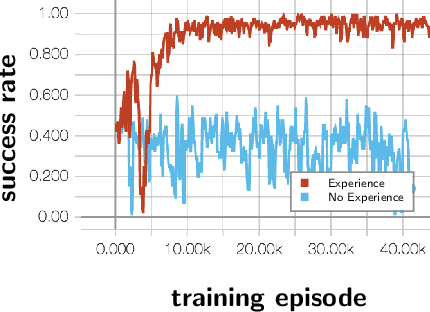
Learning When to Drive in Intersections by Combining Reinforcement Learning and Model Predictive Control
Aug 01, 2019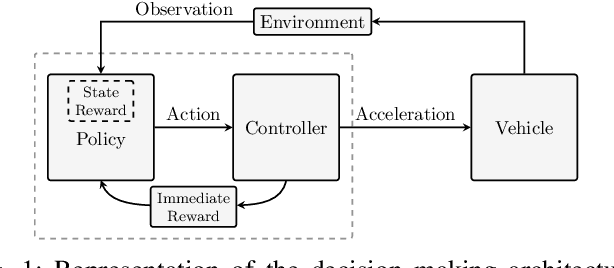
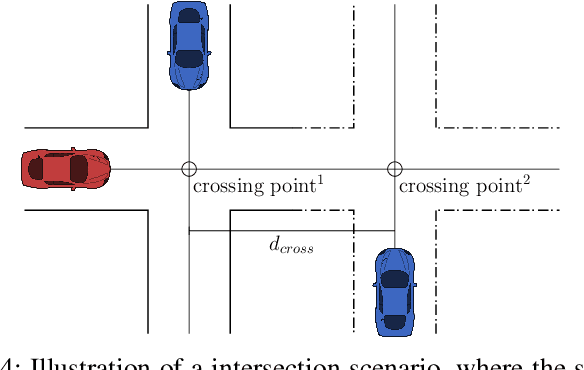
In this paper, we propose a decision making algorithm intended for automated vehicles that negotiate with other possibly non-automated vehicles in intersections. The decision algorithm is separated into two parts: a high-level decision module based on reinforcement learning, and a low-level planning module based on model predictive control. Traffic is simulated with numerous predefined driver behaviors and intentions, and the performance of the proposed decision algorithm was evaluated against another controller. The results show that the proposed decision algorithm yields shorter training episodes and an increased performance in success rate compared to the other controller.
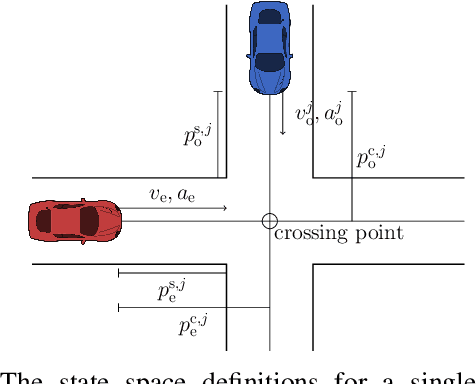
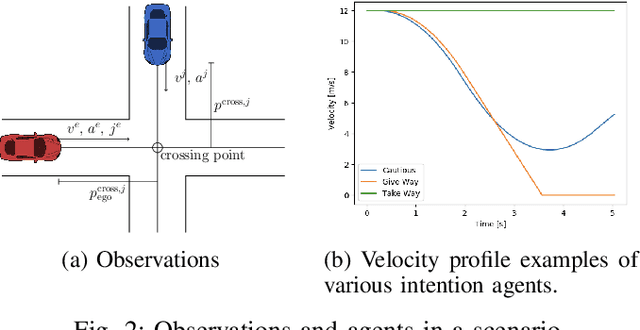
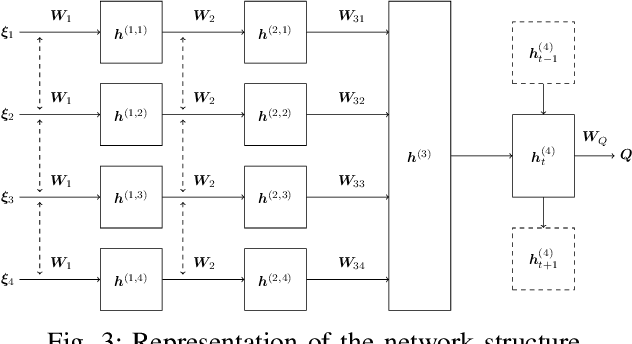
Learning Negotiating Behavior Between Cars in Intersections using Deep Q-Learning
Oct 24, 2018
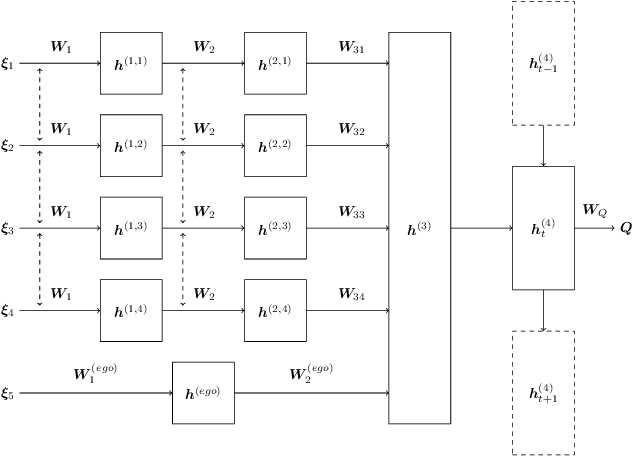
This paper concerns automated vehicles negotiating with other vehicles, typically human driven, in crossings with the goal to find a decision algorithm by learning typical behaviors of other vehicles. The vehicle observes distance and speed of vehicles on the intersecting road and use a policy that adapts its speed along its pre-defined trajectory to pass the crossing efficiently. Deep Q-learning is used on simulated traffic with different predefined driver behaviors and intentions. The results show a policy that is able to cross the intersection avoiding collision with other vehicles 98% of the time, while at the same time not being too passive. Moreover, inferring information over time is important to distinguish between different intentions and is shown by comparing the collision rate between a Deep Recurrent Q-Network at 0.85% and a Deep Q-learning at 1.75%.