 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Validation of Safe MPC for Autonomous Driving in Uncertain Environments
May 05, 2023The full deployment of autonomous driving systems on a worldwide scale requires that the self-driving vehicle be operated in a provably safe manner, i.e., the vehicle must be able to avoid collisions in any possible traffic situation. In this paper, we propose a framework based on Model Predictive Control (MPC) that endows the self-driving vehicle with the necessary safety guarantees. In particular, our framework ensures constraint satisfaction at all times, while tracking the reference trajectory as close as obstacles allow, resulting in a safe and comfortable driving behavior. To discuss the performance and real-time capability of our framework, we provide first an illustrative simulation example, and then we demonstrate the effectiveness of our framework in experiments with a real test vehicle.
ParkPredict: Motion and Intent Prediction of Vehicles in Parking Lots
Apr 21, 2020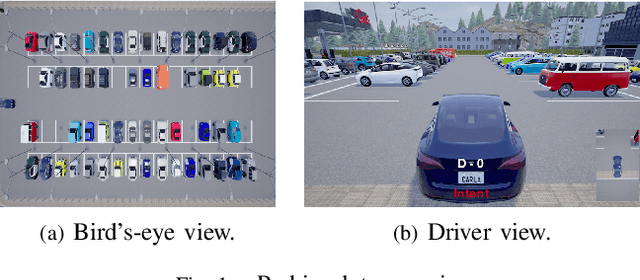
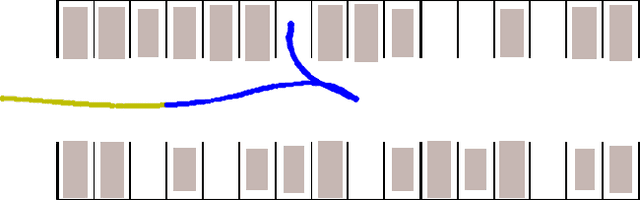
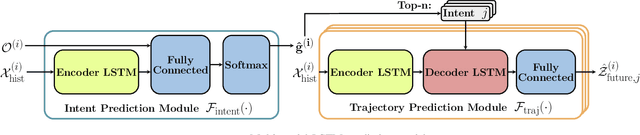
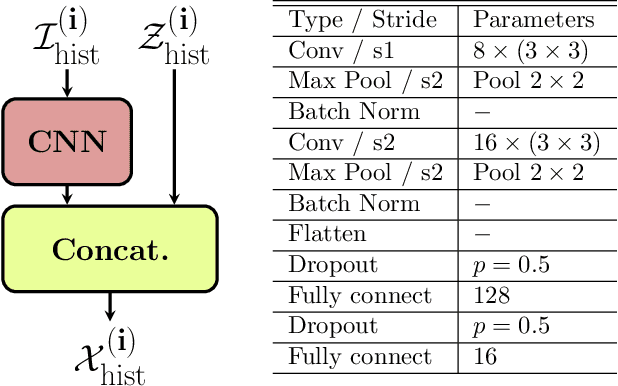
We investigate the problem of predicting driver behavior in parking lots, an environment which is less structured than typical road networks and features complex, interactive maneuvers in a compact space. Using the CARLA simulator, we develop a parking lot environment and collect a dataset of human parking maneuvers. We then study the impact of model complexity and feature information by comparing a multi-modal Long Short-Term Memory (LSTM) prediction model and a Convolution Neural Network LSTM (CNN-LSTM) to a physics-based Extended Kalman Filter (EKF) baseline. Our results show that 1) intent can be estimated well (roughly 85% top-1 accuracy and nearly 100% top-3 accuracy with the LSTM and CNN-LSTM model); 2) knowledge of the human driver's intended parking spot has a major impact on predicting parking trajectory; and 3) the semantic representation of the environment improves long term predictions.
Learning When to Drive in Intersections by Combining Reinforcement Learning and Model Predictive Control
Aug 01, 2019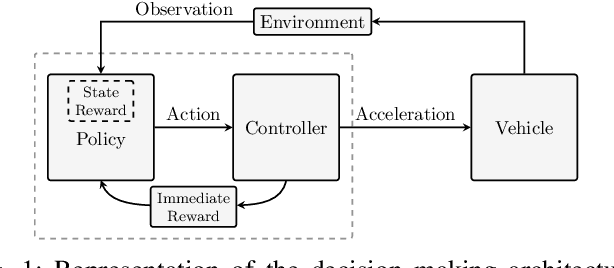
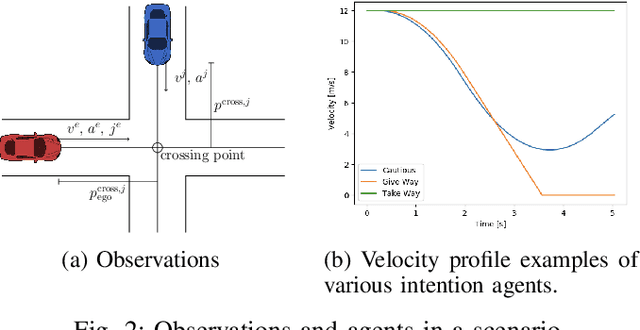
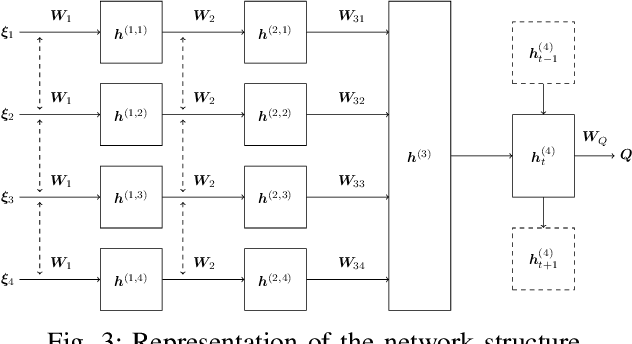
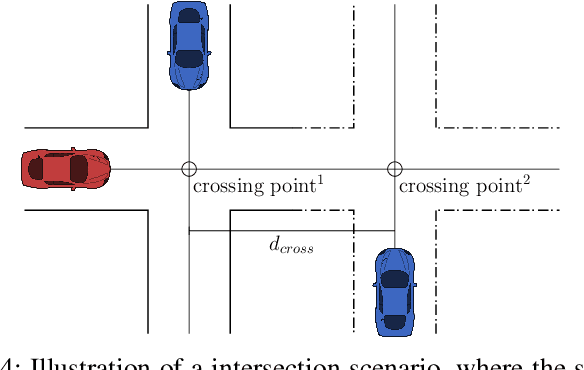
In this paper, we propose a decision making algorithm intended for automated vehicles that negotiate with other possibly non-automated vehicles in intersections. The decision algorithm is separated into two parts: a high-level decision module based on reinforcement learning, and a low-level planning module based on model predictive control. Traffic is simulated with numerous predefined driver behaviors and intentions, and the performance of the proposed decision algorithm was evaluated against another controller. The results show that the proposed decision algorithm yields shorter training episodes and an increased performance in success rate compared to the other controller.