 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicular Wireless Positioning -- A Survey
Jan 28, 2026The rapid advancement of connected and autonomous vehicles has driven a growing demand for precise and reliable positioning systems capable of operating in complex environments. Meeting these demands requires an integrated approach that combines multiple positioning technologies, including wireless-based systems, perception-based technologies, and motion-based sensors. This paper presents a comprehensive survey of wireless-based positioning for vehicular applications, with a focus on satellite-based positioning (such as global navigation satellite systems (GNSS) and low-Earth-orbit (LEO) satellites), cellular-based positioning (5G and beyond), and IEEE-based technologies (including Wi-Fi, ultrawideband (UWB), Bluetooth, and vehicle-to-vehicle (V2V) communications). First, the survey reviews a wide range of vehicular positioning use cases, outlining their specific performance requirements. Next, it explores the historical development, standardization, and evolution of each wireless positioning technology, providing an in-depth categorization of existing positioning solutions and algorithms, and identifying open challenges and contemporary trends. Finally, the paper examines sensor fusion techniques that integrate these wireless systems with onboard perception and motion sensors to enhance positioning accuracy and resilience in real-world conditions. This survey thus offers a holistic perspective on the historical foundations, current advancements, and future directions of wireless-based positioning for vehicular applications, addressing a critical gap in the literature.
Improving 3D Cellular Positioning Integrity with Bayesian RAIM
Aug 09, 2024
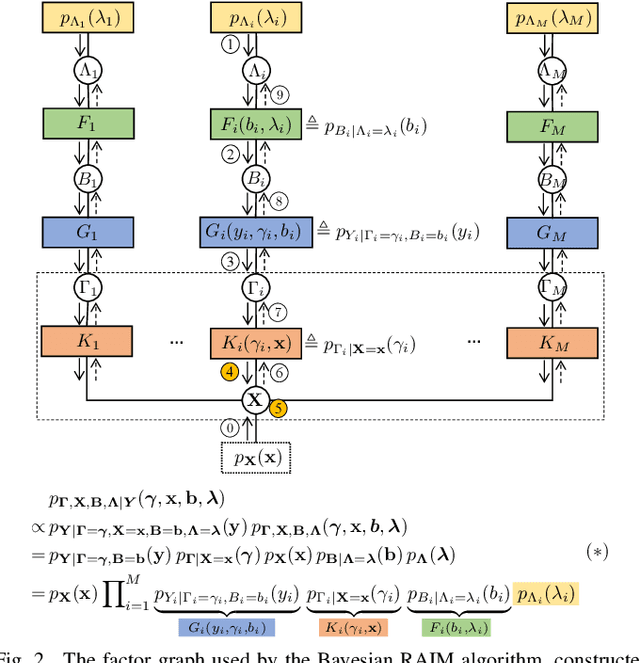
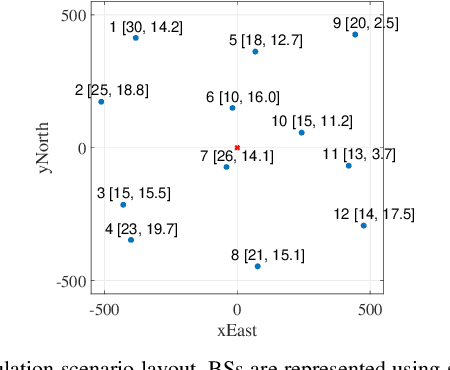
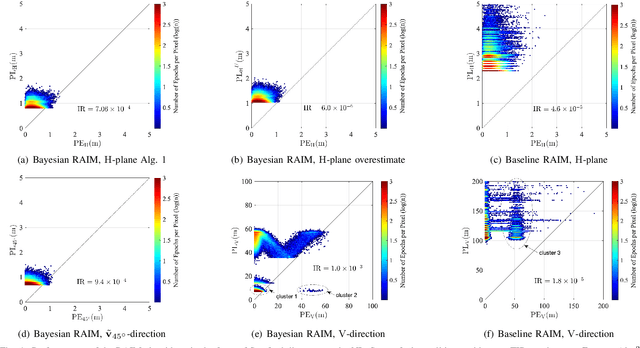
Ensuring positioning integrity amid faulty measurements is crucial for safety-critical applications, making receiver autonomous integrity monitoring (RAIM) indispensable. This paper introduces a Bayesian RAIM algorithm with a streamlined architecture for snapshot-type 3D cellular positioning. Unlike traditional frequentist-type RAIM algorithms, it computes the exact posterior probability density function (PDF) of the position vector as a Gaussian mixture (GM) model using efficient message passing along a factor graph. This Bayesian approach retains all crucial information from the measurements, eliminates the need to discard faulty measurements, and results in tighter protection levels (PLs) in 3D space and 1D/2D subspaces that meet target integrity risk (TIR) requirements. Numerical simulations demonstrate that the Bayesian RAIM algorithm significantly outperforms a baseline algorithm, achieving over $50\%$ PL reduction at a comparable computational cost.
Wiometrics: Comparative Performance of Artificial Neural Networks for Wireless Navigation
Sep 05, 2023
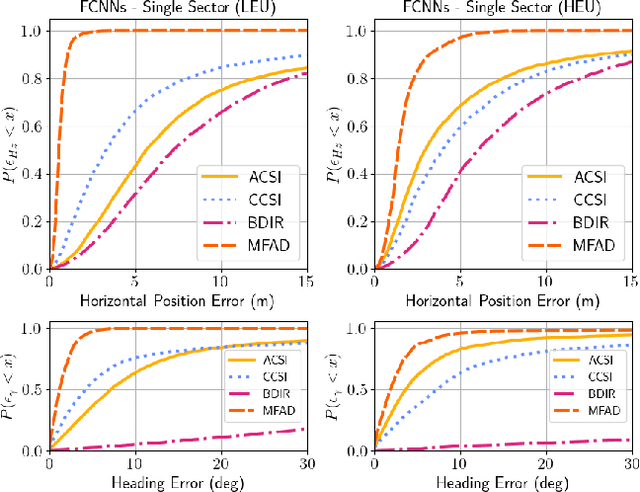
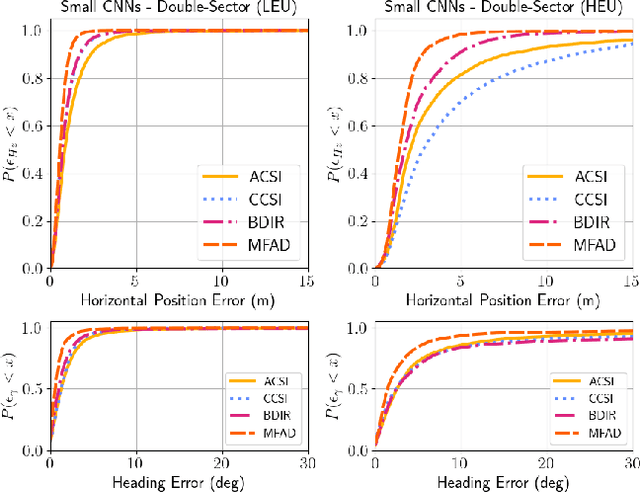
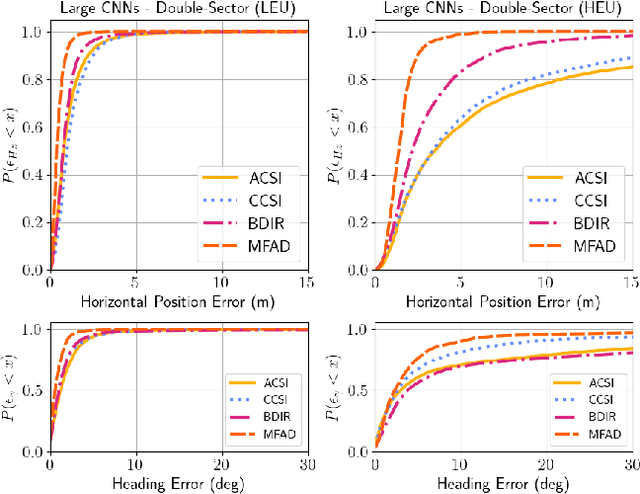
Radio signals are used broadly as navigation aids, and current and future terrestrial wireless communication systems have properties that make their dual-use for this purpose attractive. Sub-6 GHz carrier frequencies enable widespread coverage for data communication and navigation, but typically offer smaller bandwidths and limited resolution for precise estimation of geometries, particularly in environments where propagation channels are diffuse in time and/or space. Non-parametric methods have been employed with some success for such scenarios both commercially and in literature, but often with an emphasis on low-cost hardware and simple models of propagation, or with simulations that do not fully capture hardware impairments and complex propagation mechanisms. In this article, we make opportunistic observations of downlink signals transmitted by commercial cellular networks by using a software-defined radio and massive antenna array mounted on a passenger vehicle in an urban non line-of-sight scenario, together with a ground truth reference for vehicle pose. With these observations as inputs, we employ artificial neural networks to generate estimates of vehicle location and heading for various artificial neural network architectures and different representations of the input observation data, which we call wiometrics, and compare the performance for navigation. Position accuracy on the order of a few meters, and heading accuracy of a few degrees, are achieved for the best-performing combinations of networks and wiometrics. Based on the results of the experiments we draw conclusions regarding possible future directions for wireless navigation using statistical methods.
Extended FastSLAM Using Cellular Multipath Component Delays and Angular Information
Jan 18, 2023Opportunistic navigation using cellular signals is appealing for scenarios where other navigation technologies face challenges. In this paper, long-term evolution (LTE) downlink signals from two neighboring commercial base stations (BS) are received by a massive antenna array mounted on a passenger vehicle. Multipath component (MPC) delays and angle-of-arrival (AOA) extracted from the received signals are used to jointly estimate the positions of the vehicle, transmitters, and virtual transmitters (VT) with an extended fast simultaneous localization and mapping (FastSLAM) algorithm. The results show that the algorithm can accurately estimate the positions of the vehicle and the transmitters (and virtual transmitters). The vehicle's horizontal position error of SLAM fused with proprioception is less than 6 meters after a traversed distance of 530 meters, whereas un-aided proprioception results in a horizontal error of 15 meters.
High-Resolution Channel Sounding and Parameter Estimation in Multi-Site Cellular Networks
Nov 17, 2022Accurate understanding of electromagnetic propagation properties in real environments is necessary for efficient design and deployment of cellular systems. In this paper, we show a method to estimate high-resolution channel parameters with a massive antenna array in real network deployments. An antenna array mounted on a vehicle is used to receive downlink long-term evolution (LTE) reference signals from neighboring base stations (BS) with mutual interference. Delay and angular information of multipath components is estimated with a novel inter-cell interference cancellation algorithm and an extension of the RIMAX algorithm. The estimated high-resolution channel parameters are consistent with the movement pattern of the vehicle and the geometry of the environment and allow for refined channel modeling and precise cellular positioning.
Bayesian Integrity Monitoring for Cellular Positioning -- A Simplified Case Study
Nov 14, 2022



Bayesian receiver autonomous integrity monitoring (RAIM) algorithms are developed for the snapshot cellular positioning problem in a simplified one-dimensional (1D) linear Gaussian setting. Position estimation, multi-fault detection and exclusion, and protection level (PL) computation are enabled by the efficient and exact computation of the position posterior probabilities via message passing along a factor graph. Computer simulations demonstrate the significant performance improvement of the proposed Bayesian RAIM algorithms over a baseline advanced RAIM algorithm, as it obtains tighter PLs that meet the target integrity risk (TIR) requirements.