 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARMATA: Auto-Regressive Multi-Agent Task Assignment
May 05, 2026Coordinating multi-agent systems over spatially distributed areas requires solving a complex hierarchical problem: first distributing areas among agents (allocation) and subsequently determining the optimal visitation order (routing). Existing methods typically decouple these stages ignoring inter-stage dependencies or rely on decentralized heuristics that lack global context. In this work, we propose a centralized, fully end-to-end auto-regressive framework that jointly generates allocation decisions and routing sequences. The core contribution of our approach is a multi-stage decoding mechanism that unifies high-level allocation and low-level routing in a single autoregressive pass while maintaining a centralized global state. This enables the model to implicitly balance workload distribution with routing efficiency, avoiding local optima common in decentralized methods. Extensive experiments demonstrate that our method significantly outperforms diverse baselines, achieving up to a 20\% improvement in solution quality over industrial solvers such as Google OR-Tools, IBM CPLEX, and LKH-3, while reducing computation time from hours to seconds.
Look to Locate: Vision-Based Multisensory Navigation with 3-D Digital Maps for GNSS-Challenged Environments
Jun 24, 2025



In Global Navigation Satellite System (GNSS)-denied environments such as indoor parking structures or dense urban canyons, achieving accurate and robust vehicle positioning remains a significant challenge. This paper proposes a cost-effective, vision-based multi-sensor navigation system that integrates monocular depth estimation, semantic filtering, and visual map registration (VMR) with 3-D digital maps. Extensive testing in real-world indoor and outdoor driving scenarios demonstrates the effectiveness of the proposed system, achieving sub-meter accuracy of 92% indoors and more than 80% outdoors, with consistent horizontal positioning and heading average root mean-square errors of approximately 0.98 m and 1.25 {\deg}, respectively. Compared to the baselines examined, the proposed solution significantly reduced drift and improved robustness under various conditions, achieving positioning accuracy improvements of approximately 88% on average. This work highlights the potential of cost-effective monocular vision systems combined with 3D maps for scalable, GNSS-independent navigation in land vehicles.
TRATSS: Transformer-Based Task Scheduling System for Autonomous Vehicles
Apr 07, 2025Efficient scheduling remains a critical challenge in various domains, requiring solutions to complex NP-hard optimization problems to achieve optimal resource allocation and maximize productivity. In this paper, we introduce a framework called Transformer-Based Task Scheduling System (TRATSS), designed to address the intricacies of single agent scheduling in graph-based environments. By integrating the latest advancements in reinforcement learning and transformer architecture, TRATSS provides a novel system that outputs optimized task scheduling decisions while dynamically adapting to evolving task requirements and resource availability. Leveraging the self-attention mechanism in transformers, TRATSS effectively captures complex task dependencies, thereby providing solutions with enhanced resource utilization and task completion efficiency. Experimental evaluations on benchmark datasets demonstrate TRATSS's effectiveness in providing high-quality solutions to scheduling problems that involve multiple action profiles.
The NavINST Dataset for Multi-Sensor Autonomous Navigation
Feb 19, 2025The NavINST Laboratory has developed a comprehensive multisensory dataset from various road-test trajectories in urban environments, featuring diverse lighting conditions, including indoor garage scenarios with dense 3D maps. This dataset includes multiple commercial-grade IMUs and a high-end tactical-grade IMU. Additionally, it contains a wide array of perception-based sensors, such as a solid-state LiDAR - making it one of the first datasets to do so - a mechanical LiDAR, four electronically scanning RADARs, a monocular camera, and two stereo cameras. The dataset also includes forward speed measurements derived from the vehicle's odometer, along with accurately post-processed high-end GNSS/IMU data, providing precise ground truth positioning and navigation information. The NavINST dataset is designed to support advanced research in high-precision positioning, navigation, mapping, computer vision, and multisensory fusion. It offers rich, multi-sensor data ideal for developing and validating robust algorithms for autonomous vehicles. Finally, it is fully integrated with the ROS, ensuring ease of use and accessibility for the research community. The complete dataset and development tools are available at https://navinst.github.io.
Automotive Speed Estimation: Sensor Types and Error Characteristics from OBD-II to ADAS
Dec 31, 2024Modern on-road navigation systems heavily depend on integrating speed measurements with inertial navigation systems (INS) and global navigation satellite systems (GNSS). Telemetry-based applications typically source speed data from the On-Board Diagnostic II (OBD-II) system. However, the method of deriving speed, as well as the types of sensors used to measure wheel speed, differs across vehicles. These differences result in varying error characteristics that must be accounted for in navigation and autonomy applications. This paper addresses this gap by examining the diverse speed-sensing technologies employed in standard automotive systems and alternative techniques used in advanced systems designed for higher levels of autonomy, such as Advanced Driver Assistance Systems (ADAS), Autonomous Driving (AD), or surveying applications. We propose a method to identify the type of speed sensor in a vehicle and present strategies for accurately modeling its error characteristics. To validate our approach, we collected and analyzed data from three long real road trajectories conducted in urban environments in Toronto and Kingston, Ontario, Canada. The results underscore the critical role of integrating multiple sensor modalities to achieve more accurate speed estimation, thus improving automotive navigation state estimation, particularly in GNSS-denied environments.
Integration of 5G and Motion Sensors for Vehicular Positioning: A Loosely-Coupled Approach
Mar 16, 2024Autonomous vehicles (AVs) are poised to revolutionize the transportation industry by enhancing traffic efficiency and road safety. However, achieving optimal vehicular autonomy demands an uninterrupted and precise positioning solution, especially in deep urban environments. 5G mmWave holds immense potential to provide such a service due to its accurate range and angle measurements. Yet, as mmWave signals are prone to signal blockage, severe positioning errors will occur. Most of the 5G positioning literature relies on constant motion models to bridge such 5G outages, which do not capture the true dynamics of the vehicle. Few proposed methodologies rely on inertial measurement units (IMUs) to bridge such gaps, where they predominantly use tightly coupled (TC) integration schemes, introducing a nonlinear 5G measurement model. Such approaches, which rely on Kalman filtering, necessitate the linearization of the measurement model, leading to pronounced positioning errors. In this paper, however, we propose a loosely coupled (LC) sensor fusion scheme to integrate 5G, IMUs, and odometers to mitigate linearization errors. Additionally, we propose a novel method to design the process covariance matrix of the extended Kalman filter (EKF). Moreover, we propose enhancements to the mechanization of the IMU data to enhance the standalone IMU solution. The proposed methodologies were tested using a novel setup comprising 5G measurements from Siradel's S_5G simulation tool and real IMU and odometer measurements from an hour-long trajectory. The proposed method resulted in 14 cm of error for 95% of the time compared to 1 m provided by the traditional constant velocity model approach.
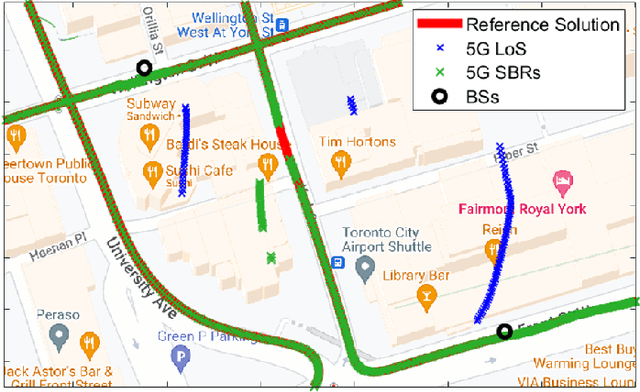
Demonstrating the Merits of Integrating Multipath Signals into 5G LoS-Based Positioning Systems for Navigation in Challenging Environments
Jun 23, 2023Constrained environments, such as indoor and urban settings, present a significant challenge for accurate moving object positioning due to the diminished line-of-sight (LoS)communication with the wireless anchor used for positioning. The 5th generation new radio (5G NR) millimeter wave (mmWave) spectrum promises high multipath resolvability in the time and angle domain, enabling the utilization of multipath signals for such problems rather than mitigating their effects. This paper investigates the benefits of integrating multipath signals into 5G LoS-based positioning systems with onboard motion sensors (OBMS). We provide a comprehensive analysis of the positioning system's performance in various conditions of erroneous 5G measurements and outage scenarios, which offers insights into the system's behavior in challenging environments. To validate our approach, we conducted a road test in downtown Toronto, utilizing actual OBMS measurements gathered from sensors installed in the test vehicle. The results indicate that utilization of multipath signals for wireless positioning operating in multipath-rich environments (e.g. urban and indoor) can bridge 5G LoS signal outages, thus enhancing the reliability and accuracy of the positioning solution. The redundant measurements obtained from the multipath signals can enhance the system's robustness, particularly when low-cost 5G receivers with a limited resolution for angle or range measurements are present. This holds true even when only considering the utilization of single-bounce reflections (SBRs).
Enabling High-Precision 5G mmWave-Based Positioning for Autonomous Vehicles in Dense Urban Environments
May 04, 2023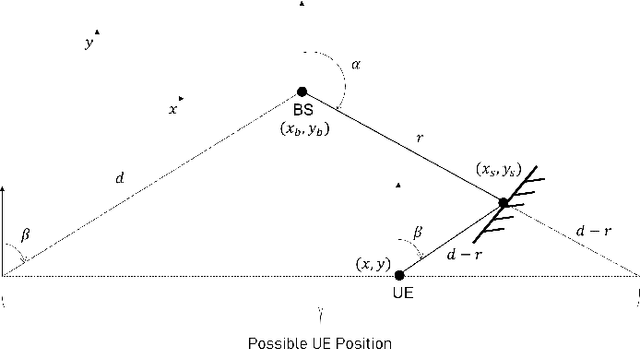
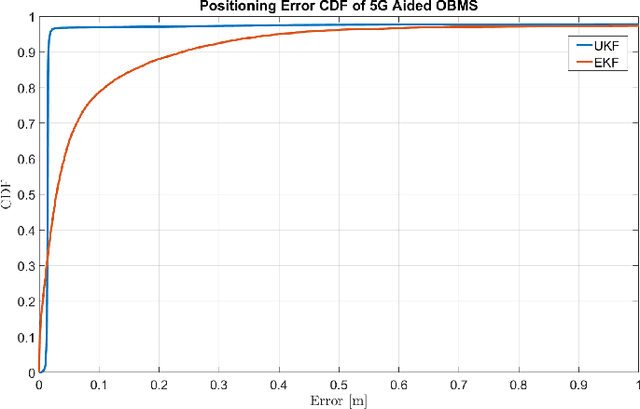
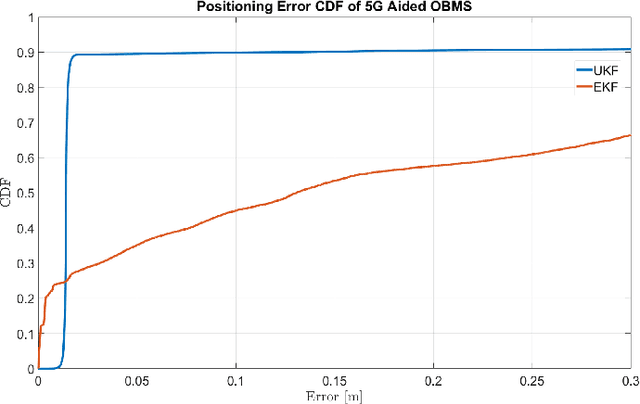
5G-based mmWave wireless positioning has emerged as a promising solution for autonomous vehicle (AV) positioning in recent years. Previous studies have highlighted the benefits of fusing a line-of-sight (LoS) 5G positioning solution with an Inertial Navigation System (INS) for an improved positioning solution. However, the highly dynamic environment of urban areas, where AVs are expected to operate, poses a challenge, as non-line-of-sight (NLoS) communication can deteriorate the 5G mmWave positioning solution and lead to erroneous corrections to the INS. To address this challenge, we exploit 5G multipath and LoS signals to improve positioning performance in dense urban environments. In addition, we integrate the proposed 5G-based positioning with low-cost onboard motion sensors (OBMS). Moreover, the integration is realized using an unscented Kalman filter (UKF) as an alternative to the widely utilized EKF as a fusion engine to avoid ignoring the higher-order and non-linear terms of the dynamic system model. We also introduce techniques to evaluate the quality of each LoS and multipath measurement prior to incorporation into the filter's correction stage. To validate the proposed methodologies, we performed two test trajectories in the dense urban environment of downtown Toronto, Canada. For each trajectory, quasi-real 5G measurements were collected using a ray-tracing tool incorporating 3D map scans of real-world buildings, allowing for realistic multipath scenarios. For the same trajectories, real OBMS data were collected from two-different low-cost IMUs. Our integrated positioning solution was capable of maintaining a level of accuracy below 30 cm for approximately 97% of the time, which is superior to the accuracy level achieved when multipath signals are not considered, which is only around 91% of the time.
Integrated 5G mmWave Positioning in Deep Urban Environments: Advantages and Challenges
May 03, 2023Achieving the highest levels of autonomy within autonomous vehicles (AVs) requires a precise and dependable positioning solution that is not influenced by the environment. 5G mmWave signals have been extensively studied in the literature to provide such a positioning solution. Yet, it is evident that 5G alone will not be able to provide uninterrupted positioning services, as outages are inevitable to occur. Towards that end, few works have explored the benefits of integrating mmWave positioning with onboard motion sensors (OBMS) like inertial measurement units (IMUs) and odometers. Inspired by INS-GNSS integration literature, all methods defaulted to a tightly-coupled (TC) integration scheme, which hinders the potential of such an integration. Additionally, the proposed methods were validated using simulated 5G and INS data with probability-based line-of-sight (LOS) assumptions. Such an experimental setup fails to highlight the true advantages and challenges of 5G-OBMS integration. Therefore, this study first explores a loosely-coupled (LC) 5G-OBMS integration scheme as a viable alternative to TC schemes. Next, it examines the merits and challenges of such an integration in a deep-urban setting using a novel quasi-real simulation setup. The setup comprises quasi-real 5G measurements from the Siradel simulator and real commercial-grade IMU measurements from a challenging one-hour-long trajectory in downtown Toronto. The trajectory featured multiple natural 5G outages which helped with assessing the integration's performance. The proposed LC method achieved a 14-cm level of accuracy for 95% of the time, while significantly limiting positioning errors during natural 5G outages.
A Decentralized Fusion Scheme for 5G Multi-BS Positioning
Mar 07, 2023Fifth generation (5G) networks are expected to provide high precision positioning estimation utilizing mmWave signals in urban and downtown areas. In such areas, 5G base stations (BSs) will be densely deployed, allowing for line-of-sight (LOS) communications between the user equipment (UE) and multiple BSs at the same time. Having access to a plethora of measurement sources grants the need for optimal integration between the BSs to have an accurate and precise positioning solution. Traditionally, 5G multi-BS fusion is conducted via an extended Kalman filter (EKF), that directly utilizes range and angle measurements in a centralized integration scheme. Such measurements have a non-linear relationship with the positioning states of the filter, giving rise to linearization errors. Counter to the common belief, an unscented Kalman filter (UKF) will fail to totally eradicate such linearization errors. In this paper, we argue that a de-centralized integration between 5G BSs would fully avoid linearization errors and would enhance the positioning performance significantly. This is done by fusing position measurements as opposed to directly fusing range and angle measurements, which inherently leads to a linear measurement model by design. The proposed de-centralized KF method was evaluated in a quasi-real simulation setup provided by Siradel using a real trajectory in Downtown Toronto. The experiments compared the performance of de-centralized KF integration to that of centralized EKF and UKF integration schemes. It was shown that the proposed method was able to outperform both UKF and EKF implementations in multiple scenarios as it decreased the RMS and maximum 2D positioning errors significantly, achieving decimeter-level of accuracy for 90.3% of the time.