 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEcho-Side Integrated Sensing and Communication via Space-Time Reconfigurable Intelligent Surfaces
Jan 14, 2026This paper presents an echo-side modulation framework for integrated sensing and communication (ISAC) systems. A space-time reconfigurable intelligent surface (ST-RIS) impresses a continuous-phase modulation onto the radar echo, enabling uplink data transmission with a phase modulation of the transmitted radar-like waveform. The received signal is a multiplicative composition of the sensing waveform and the phase for communication. Both functionalities share the same physical signal and perceive each other as impairments. The achievable communication rate is expressed as a function of a coupling parameter that links sensing accuracy to phase error accumulation. Under a fixed bandwidth constraint, the sensing and communication figures of merit define a convex Pareto frontier. The optimal bandwidth allocation satisfying a minimum sensing requirement is derived in closed form. The modified Cramer-Rao bound (MCRB) for range estimation is derived in closed form; this parameter must be estimated to compensate for the frequency offset before data demodulation. Frame synchronization is formulated as a generalized likelihood ratio test (GLRT), and the detection probability is obtained through characteristic function inversion, accounting for residual frequency errors from imperfect range estimation. Numerical results validate the theoretical bounds and characterize the trade-off across the operating range.
Enabling NLOS Imaging Capabilities at the Initial Access of 6G Base Stations
Nov 19, 2025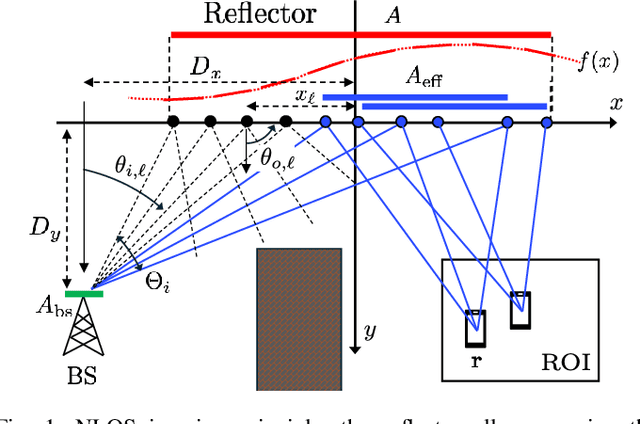
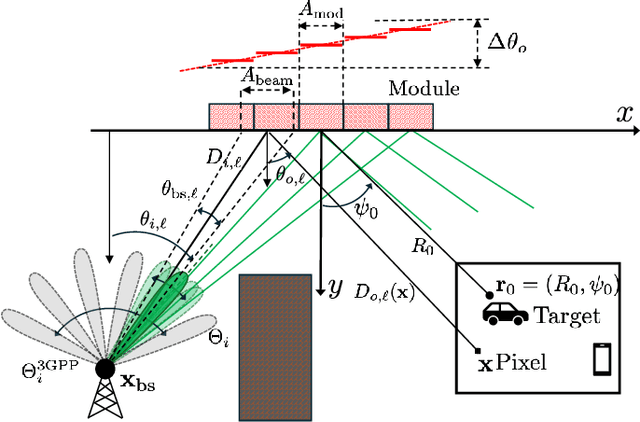
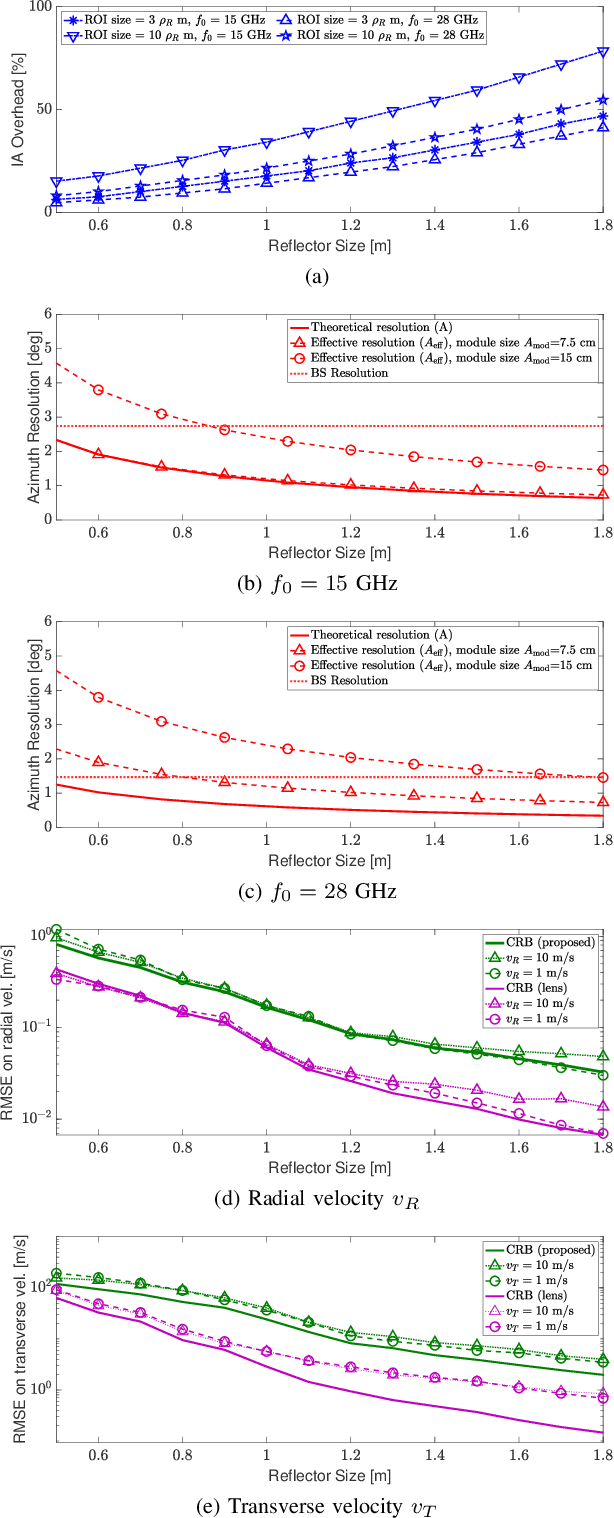
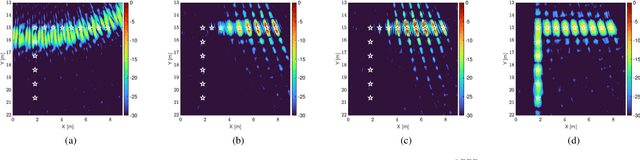
Sensing in non-line-of-sight (NLOS) is one of the major challenges for integrated sensing and communication systems. Existing countermeasures for NLOS either use prior knowledge on the environment to characterize all the multiple bounces or deploy anomalous reflectors in the environment to enable communication infrastructure to ''\textit{see behind the corner}''. This work addresses the integration of monostatic NLOS imaging functionalities into the initial access (IA) procedure of a next generation base station (BS), by means of a non-reconfigurable modular reflector. During standard-compliant IA, the BS sweeps a narrow beam using a pre-defined dedicated codebook to achieve the beam alignment with users. We introduce the imaging functionality by enhancing such codebook with imaging-specific entries that are jointly designed with the angular configuration of the modular reflector to enable high-resolution imaging of a region in NLOS by \textit{coherently} processing all the echoes at the BS. We derive closed-form expressions for the near-field (NF) spatial resolution, as well as for the \textit{effective aperture} (i.e., the portion of the reflector that actively contributes to improve image resolution). The problem of imaging of moving targets in NLOS is also addressed, and we propose a maximum-likelihood estimation for target's velocity in NF and related theoretical bound. Further, we discuss and quantify the inherent communication-imaging performance trade-offs and related system design challenges through numerical simulations. Finally, the proposed imaging method employing modular reflectors is validated both numerically and experimentally, showing the effectiveness of our concept.
Multi-View Integrated Imaging and Communication
Oct 03, 2024



Non-line-of-sight (NLOS) operation is one of the open issues to be solved for integrated sensing and communication (ISAC) systems to become a pillar of the future wireless infrastructure above 10 GHz. Existing NLOS countermeasures use either metallic mirrors, that are limited in coverage, or reconfigurable metasurfaces, that are limited in size due to cost. This paper focuses on integrated imaging and communication (IIAC) systems for NLOS exploration, where a base station (BS) serves the users while gathering a high-resolution image of the area. We exploit a large reflection plane, that is phase-configured in space and time jointly with a proper BS beam sweeping to provide a multi-view observation of the area and maximizing the image resolution. Remarkably, we achieve a near-field imaging through successive far-field acquisitions, limiting the design complexity and cost. Numerical results prove the benefits of our proposal.
Sensing in NLOS: a Stroboscopic Approach
Aug 19, 2024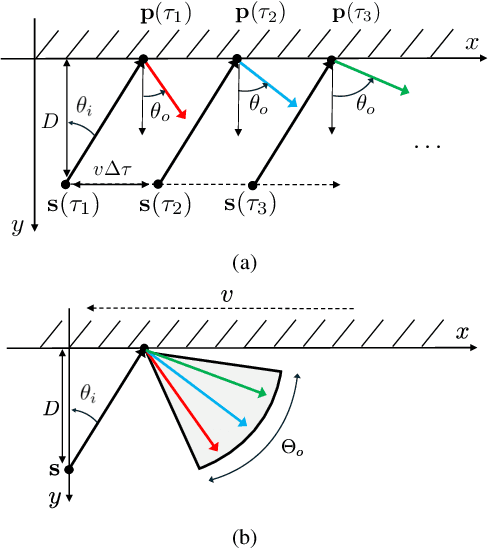

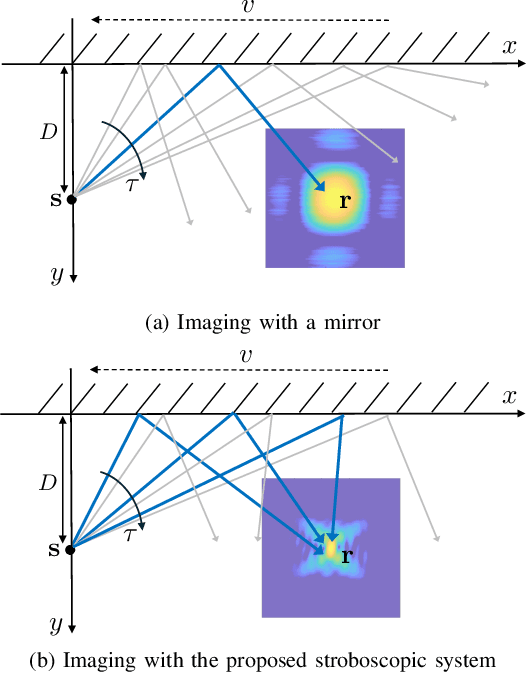
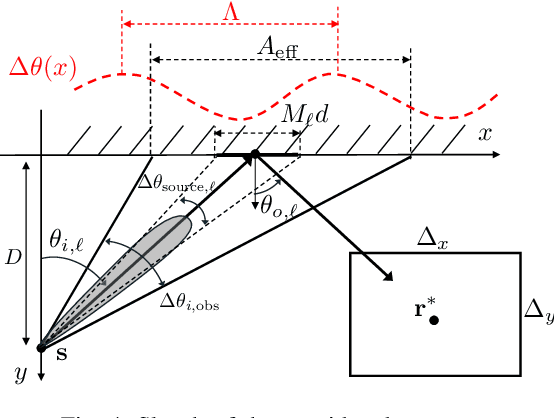
Sensing in non-line-of-sight (NLOS) is a well-known issue that limits the effective range of radar-like sensors. Existing approaches for NLOS sensing consider the usage of either metallic mirrors, that only work under specular reflection, or dynamically-reconfigurable metasurfaces that steer the signal to cover a desired area in NLOS, with the drawback of cost and control signaling. This paper proposes a novel sensing system, that allows a source to image a desired region of interest (ROI) in NLOS, using the combination of a proper beam sweeping (by the source) as well as a passive reflection plane configured as a periodic angular deflecting function (that allows illuminating the ROI). \textit{Stroboscopic sensing} is obtained by sweeping over a sufficiently large portion of the reflection plane, the source covers the ROI \textit{and} enhance the spatial resolution of the image, thanks to multiple diverse observation angles of ROI. Remarkably, the proposed system achieves a near-field imaging with a sequence of far-field acquisitions, thus limiting the implementation complexity. We detail the system design criteria and trade-offs, demonstrating the remarkable benefits of such a stroboscopic sensing system, where a possibly moving source can observe a ROI through multiple points of view as if it were static.
Hiding Local Manipulations on SAR Images: a Counter-Forensic Attack
Jul 09, 2024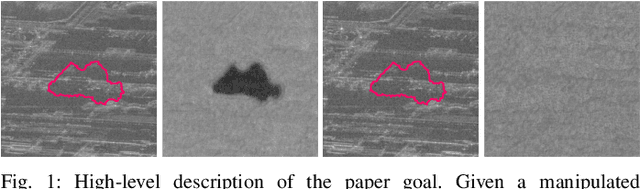
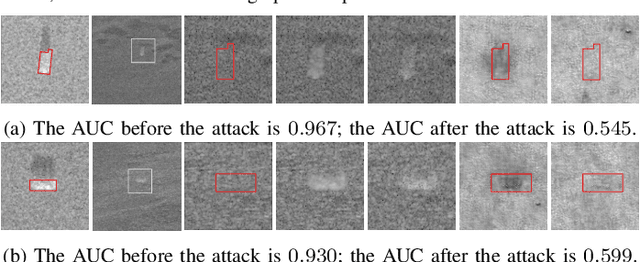
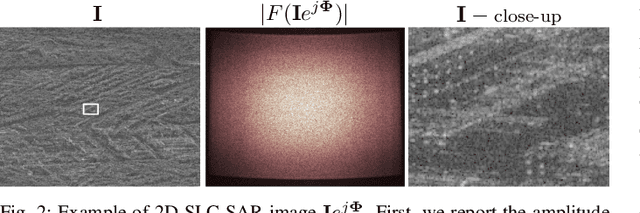
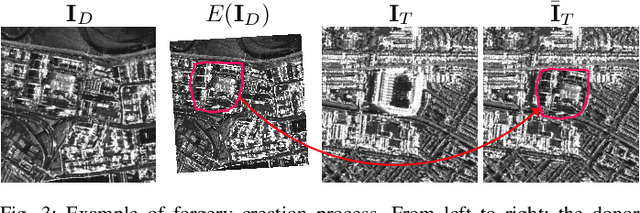
The vast accessibility of Synthetic Aperture Radar (SAR) images through online portals has propelled the research across various fields. This widespread use and easy availability have unfortunately made SAR data susceptible to malicious alterations, such as local editing applied to the images for inserting or covering the presence of sensitive targets. Vulnerability is further emphasized by the fact that most SAR products, despite their original complex nature, are often released as amplitude-only information, allowing even inexperienced attackers to edit and easily alter the pixel content. To contrast malicious manipulations, in the last years the forensic community has begun to dig into the SAR manipulation issue, proposing detectors that effectively localize the tampering traces in amplitude images. Nonetheless, in this paper we demonstrate that an expert practitioner can exploit the complex nature of SAR data to obscure any signs of manipulation within a locally altered amplitude image. We refer to this approach as a counter-forensic attack. To achieve the concealment of manipulation traces, the attacker can simulate a re-acquisition of the manipulated scene by the SAR system that initially generated the pristine image. In doing so, the attacker can obscure any evidence of manipulation, making it appear as if the image was legitimately produced by the system. We assess the effectiveness of the proposed counter-forensic approach across diverse scenarios, examining various manipulation operations. The obtained results indicate that our devised attack successfully eliminates traces of manipulation, deceiving even the most advanced forensic detectors.
Integrated Communication and Imaging: Design, Analysis, and Performances of COSMIC Waveforms
May 29, 2024

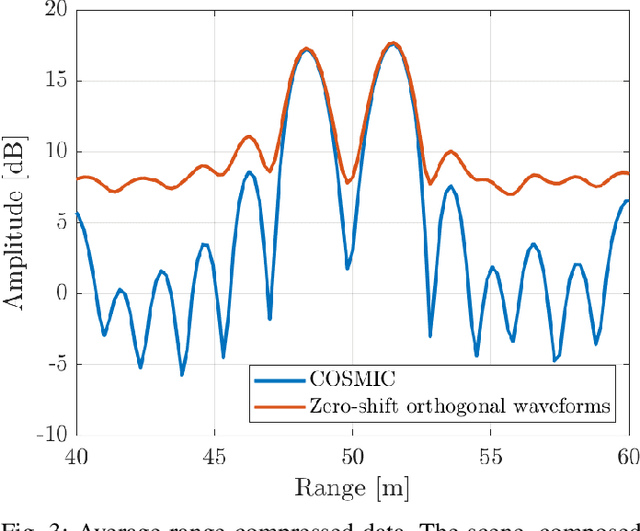

This paper proposes a novel waveform design method named COSMIC (Connectivity-Oriented Sensing Method for Imaging and Communication). These waveforms are engineered to convey communication symbols while adhering to an extended orthogonality condition, enabling their use in generating radio images of the environment. A Multiple-Input Multiple-Output (MIMO) Radar-Communication (RadCom) device transmits COSMIC waveforms from each antenna simultaneously within the same time window and frequency band, indicating that orthogonality is not achieved by space, time, or frequency multiplexing. Indeed, orthogonality among the waveforms is achieved by leveraging the degrees of freedom provided by the assumption that the field of view is limited or significantly smaller than the transmitted signals' length. The RadCom device receives and processes the echoes from an infinite number of infinitesimal scatterers within its field of view, constructing an electromagnetic image of the environment. Concurrently, these waveforms can also carry information to other connected network entities. This work provides the algebraic concepts used to generate COSMIC waveforms. Moreover, an opportunistic optimization of the imaging and communication efficiency is discussed. Simulation results demonstrate that COSMIC waveforms enable accurate environmental imaging while maintaining acceptable communication performances.
Exploring ISAC Technology for UAV SAR Imaging
Jan 19, 2024



This paper illustrates the potential of an Integrated Sensing and Communication (ISAC) system, operating in the sub-6 GHz frequency range, for Synthetic Aperture Radar (SAR) imaging via an Unmanned Aerial Vehicle (UAV) employed as an aerial base station. The primary aim is to validate the system's ability to generate SAR imagery within the confines of modern communication standards, including considerations like power limits, carrier frequency, bandwidth, and other relevant parameters. The paper presents two methods for processing the signal reflected by the scene. Additionally, we analyze two key performance indicators for their respective fields, the Noise Equivalent Sigma Zero (NESZ) and the Bit Error Rate (BER), using the QUAsi Deterministic RadIo channel GenerAtor (QuaDRiGa), demonstrating the system's capability to image buried targets in challenging scenarios. The paper shows simulated Impulse Response Functions (IRF) as possible pulse compression techniques under different assumptions. An experimental campaign is conducted to validate the proposed setup by producing a SAR image of the environment captured using a UAV flying with a Software-Defined Radio (SDR) as a payload.
Multi-View Near-field Imaging in NLOS with Non-Reconfigurable EM Skins
Jan 12, 2024



This paper deals with radar imaging in non-line of sight (NLOS) with the aid of non-reconfigurable electromagnetic skins (NR-EMSs). NR-EMSs are passive metasurfaces whose reflection properties are defined during the manufacturing process, and represent a low-cost alternative to reconfigurable intelligent surfaces to implement advanced wave manipulations. We propose and discuss a multi-view near-field radar imaging system where a moving source progressively illuminates different portions of the NR-EMS, whereby each portion (\textit{module}) is purposely phase-configured to focus the impinging radiation over a desired NLOS area of interest. The source, e.g., a radar-equipped vehicle, synthesizes a wide aperture that maps onto the NR-EMS, allowing NLOS imaging with enhanced resolution compared to the standalone radar capabilities. Simulation results show the feasibility and benefits of such an imaging approach and shed light on a possible practical application of metasurfaces for sensing.
Cooperative Coherent Multistatic Imaging and Phase Synchronization in Networked Sensing
Nov 13, 2023

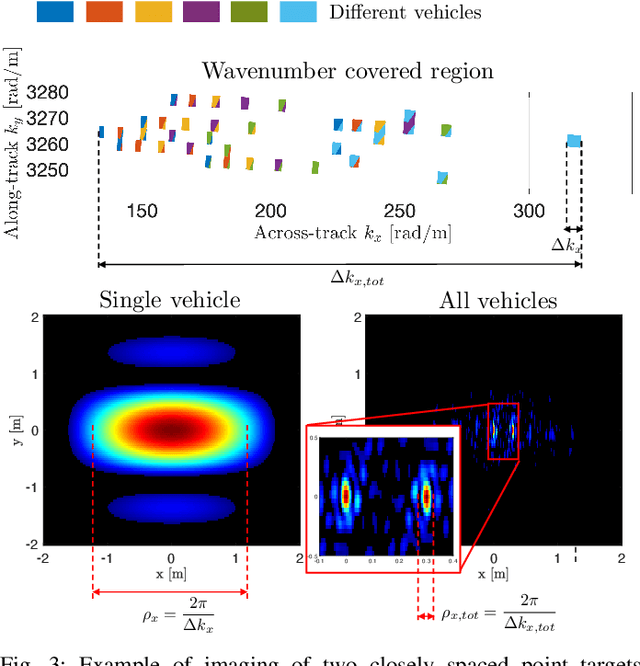

Coherent multistatic radio imaging represents a pivotal opportunity for forthcoming wireless networks, which involves distributed nodes cooperating to achieve accurate sensing resolution and robustness. This paper delves into cooperative coherent imaging for vehicular radar networks. Herein, multiple radar-equipped vehicles cooperate to improve collective sensing capabilities and address the fundamental issue of distinguishing weak targets in close proximity to strong ones, a critical challenge for vulnerable road users protection. We prove the significant benefits of cooperative coherent imaging in the considered automotive scenario in terms of both probability of correct detection, evaluated considering several system parameters, as well as resolution capabilities, showcased by a dedicated experimental campaign wherein the collaboration between two vehicles enables the detection of the legs of a pedestrian close to a parked car. Moreover, as \textit{coherent} processing of several sensors' data requires very tight accuracy on clock synchronization and sensor's positioning -- referred to as \textit{phase synchronization} -- (such that to predict sensor-target distances up to a fraction of the carrier wavelength), we present a general three-step cooperative multistatic phase synchronization procedure, detailing the required information exchange among vehicles in the specific automotive radar context and assessing its feasibility and performance by hybrid Cram\'er-Rao bound.
Wavefield Networked Sensing: Principles, Algorithms and Applications
May 17, 2023



Networked sensing refers to the capability of properly orchestrating multiple sensing terminals to enhance specific figures of merit, e.g., positioning accuracy or imaging resolution. Regarding radio-based sensing, it is essential to understand \textit{when} and \textit{how} sensing terminals should be orchestrated, namely the best cooperation that trades between performance and cost (e.g., energy consumption, communication overhead, and complexity). This paper addresses networked sensing from a physics-driven perspective, aiming to provide a general theoretical benchmark to evaluate its \textit{imaging} performance bounds and to guide the sensing orchestration accordingly. Diffraction tomography theory (DTT) is the method to quantify the imaging resolution of any radio sensing experiment from inspection of its spectral (or wavenumber) content. In networked sensing, the image formation is based on the back-projection integral, valid for any network topology and physical configuration of the terminals. The \textit{wavefield networked sensing} is a framework in which multiple sensing terminals are orchestrated during the acquisition process to maximize the imaging quality (resolution and grating lobes suppression) by pursuing the deceptively simple \textit{wavenumber tessellation principle}. We discuss all the cooperation possibilities between sensing terminals and possible killer applications. Remarkably, we show that the proposed method allows obtaining high-quality images of the environment in limited bandwidth conditions, leveraging the coherent combination of multiple multi-static low-resolution images.