 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Coherent Multistatic Imaging and Phase Synchronization in Networked Sensing
Paper and Code
Nov 13, 2023

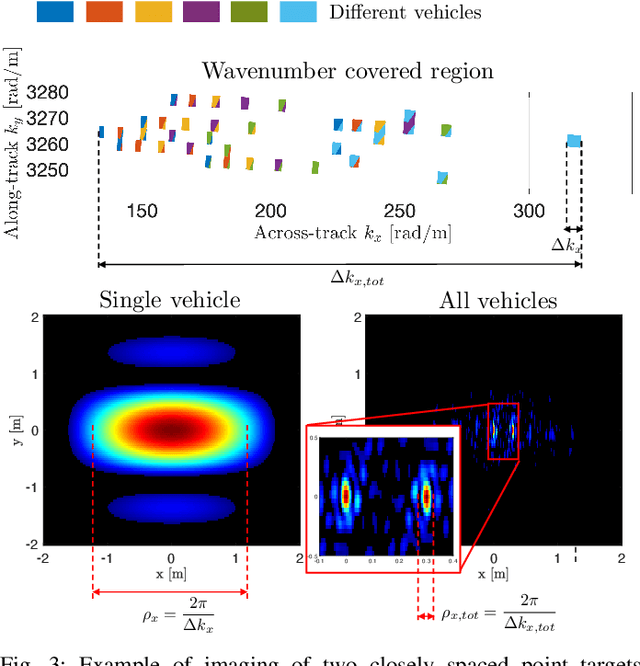

Coherent multistatic radio imaging represents a pivotal opportunity for forthcoming wireless networks, which involves distributed nodes cooperating to achieve accurate sensing resolution and robustness. This paper delves into cooperative coherent imaging for vehicular radar networks. Herein, multiple radar-equipped vehicles cooperate to improve collective sensing capabilities and address the fundamental issue of distinguishing weak targets in close proximity to strong ones, a critical challenge for vulnerable road users protection. We prove the significant benefits of cooperative coherent imaging in the considered automotive scenario in terms of both probability of correct detection, evaluated considering several system parameters, as well as resolution capabilities, showcased by a dedicated experimental campaign wherein the collaboration between two vehicles enables the detection of the legs of a pedestrian close to a parked car. Moreover, as \textit{coherent} processing of several sensors' data requires very tight accuracy on clock synchronization and sensor's positioning -- referred to as \textit{phase synchronization} -- (such that to predict sensor-target distances up to a fraction of the carrier wavelength), we present a general three-step cooperative multistatic phase synchronization procedure, detailing the required information exchange among vehicles in the specific automotive radar context and assessing its feasibility and performance by hybrid Cram\'er-Rao bound.