Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResidual Motion Compensation in Automotive MIMO SAR Imaging
Paper and Code
Oct 28, 2021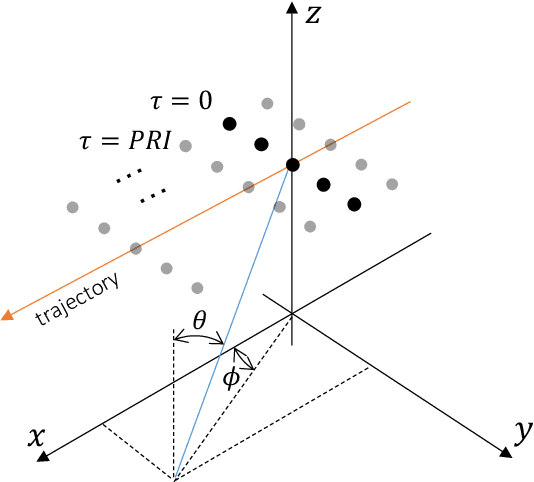
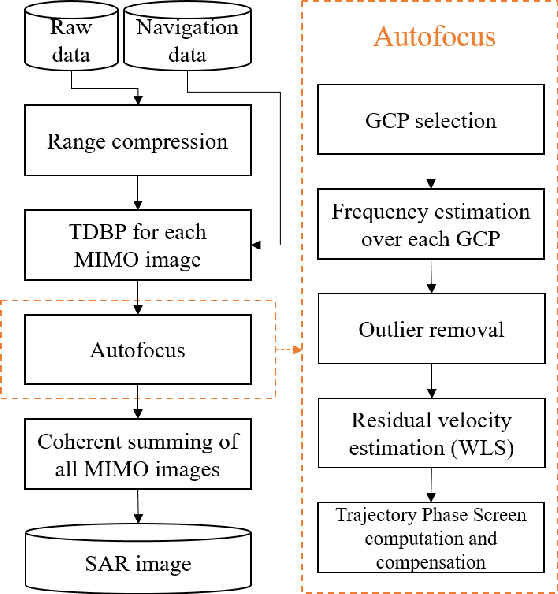
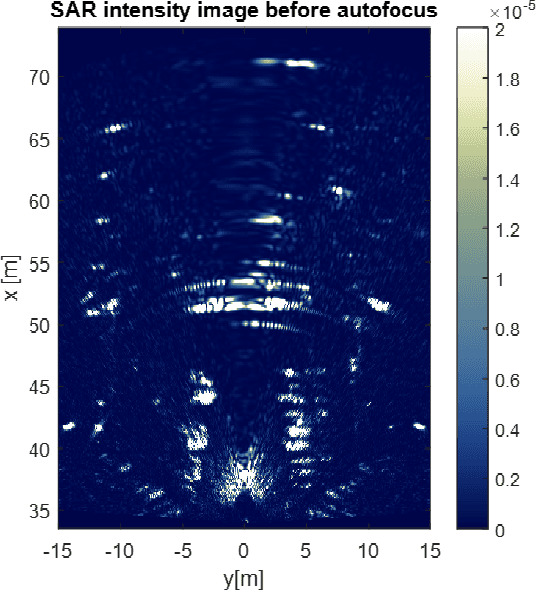

This paper deals with the analysis, estimation, and compensation of trajectory errors in automotive-based Synthetic Aperture Radar (SAR) systems. First of all, we define the geometry of the acquisition and the model of the received signal. We then proceed by analytically evaluating the effect of an error in the vehicle's trajectory. Based on the derived model, we introduce a motion compensation (MoCo) procedure capable of estimating and compensating constant velocity motion errors leading to a well-focused and well-localized SAR image. The procedure is validated using real data gathered by a 77 GHz automotive SAR with MIMO capabilities.
* 6 pages
View paper on