 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIMT to Satellite Stochastic Interference Modeling and Coexistence Analysis of Upper 6 GHz Band Service
Sep 14, 2022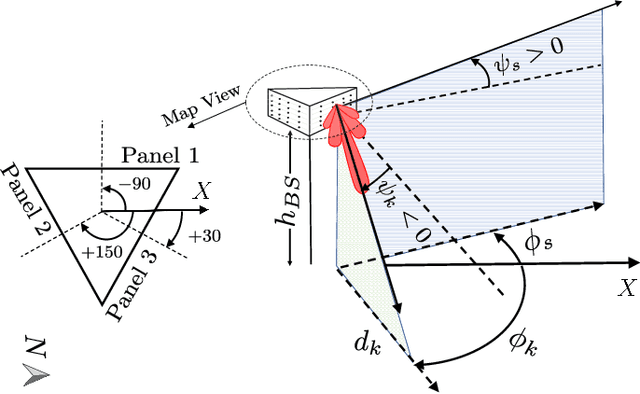

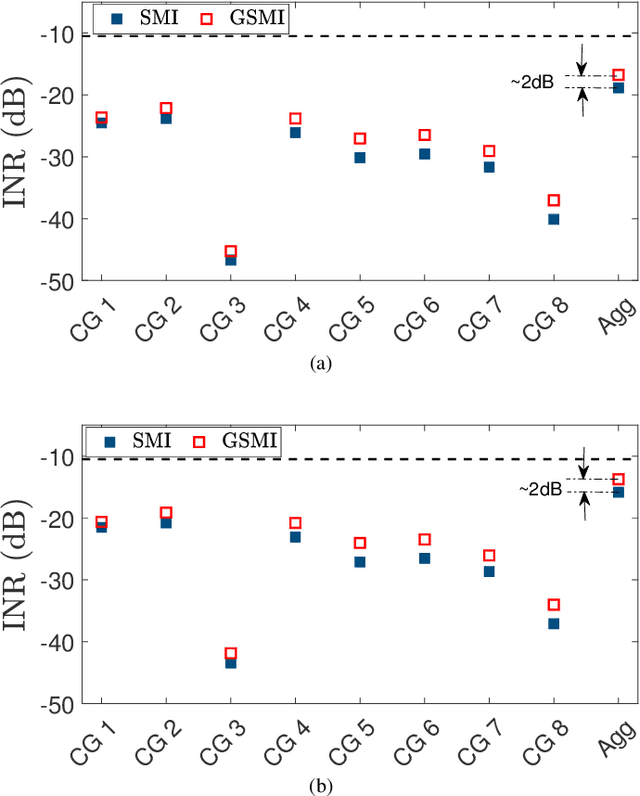
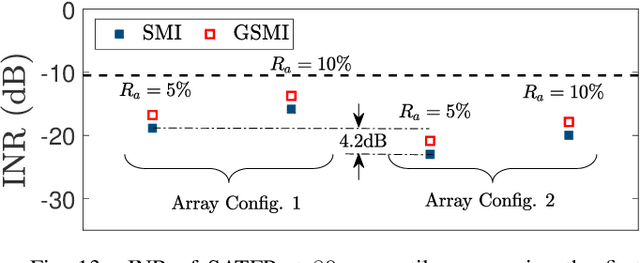
The surging capacity demands of 5G networks and the limited coverage distance of high frequencies like millimeter wave (mmW) and sub-terahertz (THz) bands have led to consider the upper 6GHz (U6G) spectrum for radio access. However, due to the presence of the existing satellite (SAT) services in these bands, it is crucial to evaluate the impact of the interference of terrestrial U6G stations to SAT systems. A comprehensive study on the aggregated U6G-to-SAT interference is still missing in the literature. In this paper, we propose a stochastic model of interference (SMI) to evaluate the U6G-to-SAT interference, including the statistical characterization of array gain and clutter loss and considering different interference modes. Furthermore, we propose an approximate geometrical-based stochastic model of interference (GSMI) as an alternative method to SMI when the clutter-loss distribution is unavailable. Our results indicate that given the typical international mobile telecommunication (IMT) parameters, the aggregated interference power is well below the relevant protection criterion, and we prove numerically that the GSMI method overestimates the aggregated interference power with only 2dB compared to the SMI method.
Localizing the Vehicle's Antenna: an Open Problem in 6G Network Sensing
Apr 03, 2022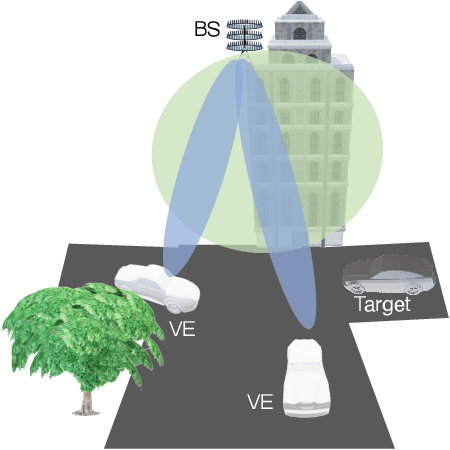
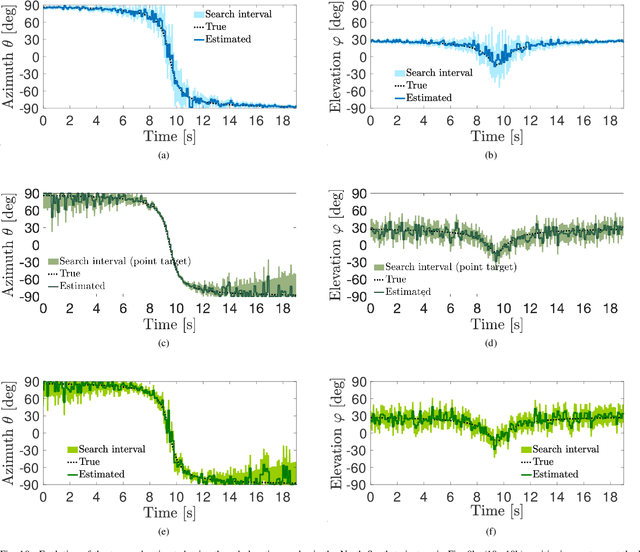
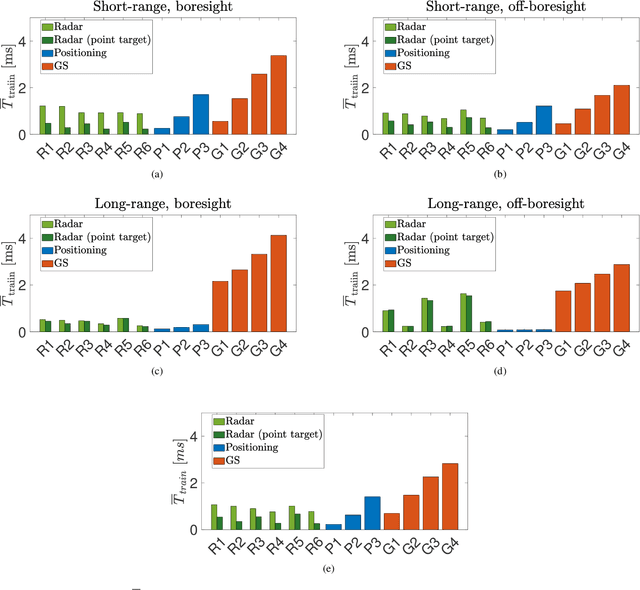
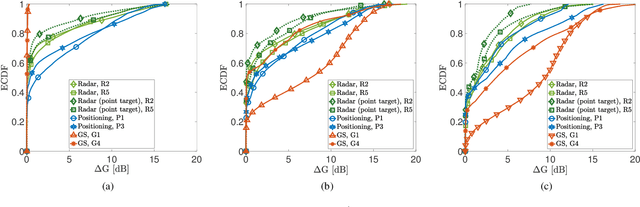
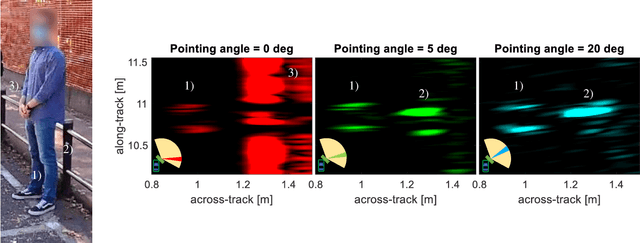
Millimeter Waves (mmW) and sub-THz frequencies are the candidate bands for the upcoming Sixth Generation (6G) of communication systems. The use of collimated beams at mmW/sub-THz to compensate for the increased path and penetration loss arises the need for a seamless Beam Management (BM), especially for high mobility scenarios such as the Vehicle-to-Infrastructure (V2I) one. Recent research advances in Integrated Sensing and Communication (ISAC) indicate that equipping the network infrastructure, e.g., the Base Station (BS), with either a stand-alone radar or sensing capabilities using optimized waveforms, represents the killer technology to facilitate the BM. However, radio sensing should accurately localize the Vehicular Equipment (VE)'s antenna, which is not guaranteed in general. Differently, employing side information from VE's onboard positioning sensors might overcome this limitation at the price of an increased control signaling between VE and BS. This paper provides a pragmatic comparison between radar-assisted and position-assisted BM for mmW V2I systems in a typical urban scenario in terms of BM training time and beamforming gain loss due to a wrong BM decision. Simulation results, supported by experimental evidence, show that the point target approximation of a traveling VE does not hold in practical V2I scenarios with radar-equipped BS. Therefore, the true antenna position has a residual uncertainty that is independent of radar's resolution and implies 50\,\% more BM training time on average. Moreover, there is not a winning technology for BM between BS-mounted radar and VE's onboard positioning systems. They provide complementary performance, depending on position, although outperforming blind BM techniques compared to conventional blind methods. Thus, we propose to optimally combine radar and positioning information in a multi-technology integrated BM solution.
Motion Estimation and Compensation in Automotive MIMO SAR
Jan 25, 2022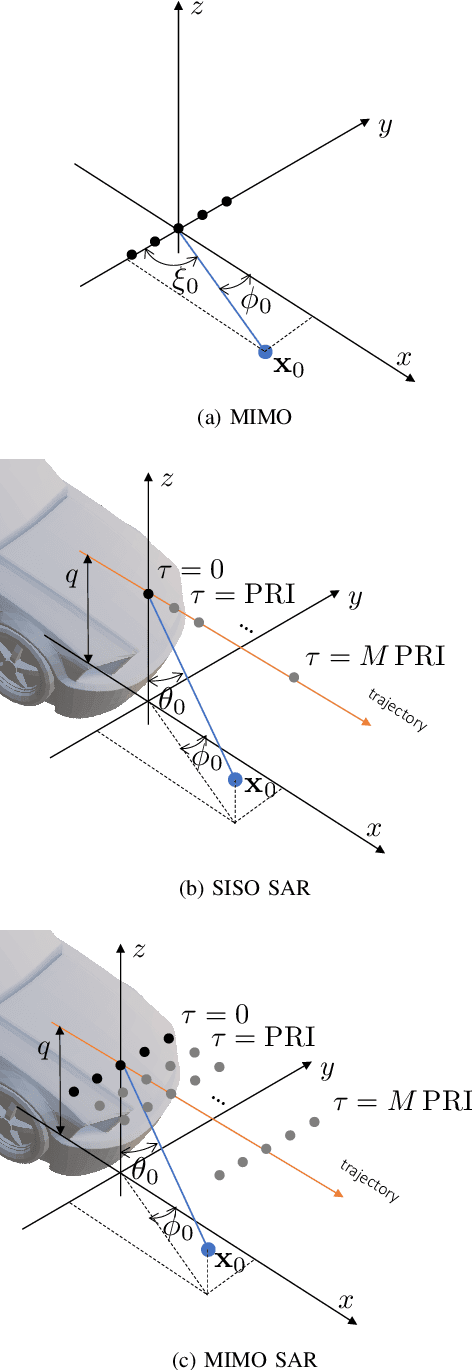

With the advent of self-driving vehicles, autonomous driving systems will have to rely on a vast number of heterogeneous sensors to perform dynamic perception of the surrounding environment. Synthetic Aperture Radar (SAR) systems increase the resolution of conventional mass-market radars by exploiting the vehicle's ego-motion, requiring a very accurate knowledge of the trajectory, usually not compatible with automotive-grade navigation systems. In this regard, this paper deals with the analysis, estimation and compensation of trajectory estimation errors in automotive SAR systems, proposing a complete residual motion estimation and compensation workflow. We start by defining the geometry of the acquisition and the basic processing steps of Multiple-Input Multiple-Output (MIMO) SAR systems. Then, we analytically derive the effects of typical motion errors in automotive SAR imaging. Based on the derived models, the procedure is detailed, outlining the guidelines for its practical implementation. We show the effectiveness of the proposed technique by means of experimental data gathered by a 77 GHz radar mounted in a forward looking configuration.
Residual Motion Compensation in Automotive MIMO SAR Imaging
Oct 28, 2021
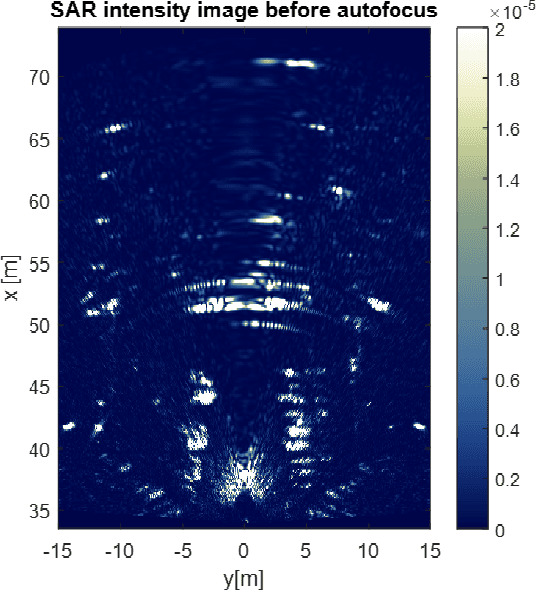

This paper deals with the analysis, estimation, and compensation of trajectory errors in automotive-based Synthetic Aperture Radar (SAR) systems. First of all, we define the geometry of the acquisition and the model of the received signal. We then proceed by analytically evaluating the effect of an error in the vehicle's trajectory. Based on the derived model, we introduce a motion compensation (MoCo) procedure capable of estimating and compensating constant velocity motion errors leading to a well-focused and well-localized SAR image. The procedure is validated using real data gathered by a 77 GHz automotive SAR with MIMO capabilities.
Multi-Beam Automotive SAR Imaging in Urban Scenarios
Oct 28, 2021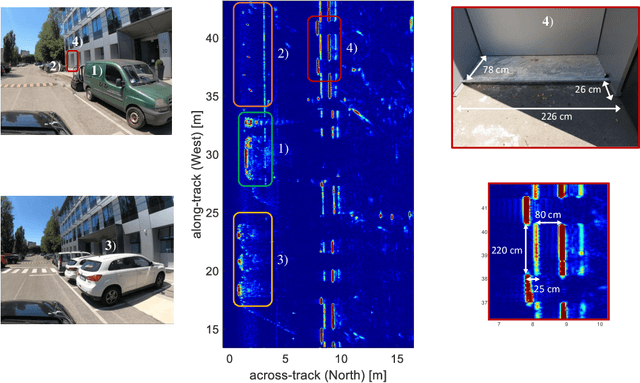
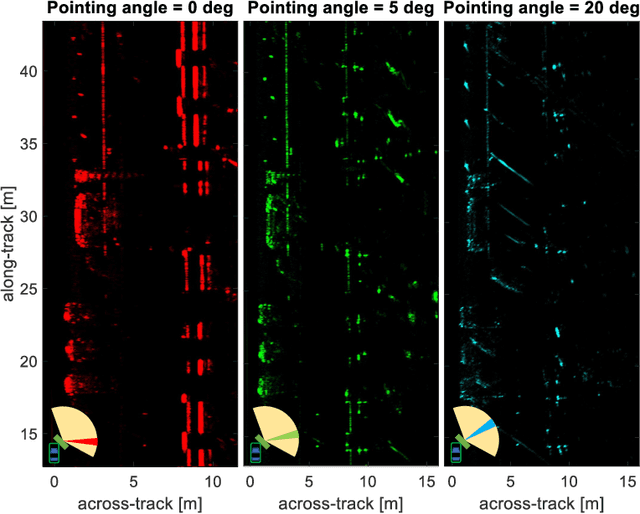
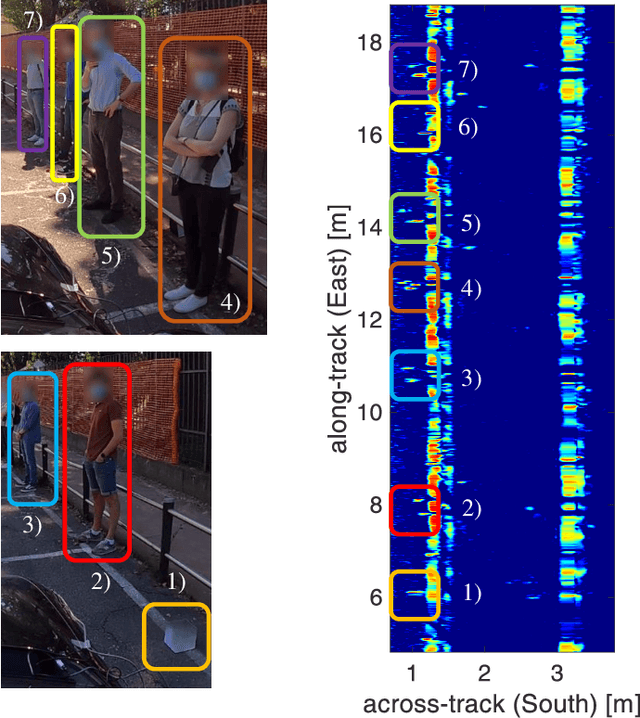
Automotive synthetic aperture radar (SAR) systems are rapidly emerging as a candidate technological solution to enable a high-resolution environment mapping for autonomous driving. Compared to lidars and cameras, automotive-legacy radars can work in any weather condition and without an external source of illumination, but are limited in either range or angular resolution. SARs offer a relevant increase in angular resolution, provided that the ego-motion of the radar platform is known along the synthetic aperture. In this paper, we present the results of an experimental campaign aimed at assessing the potential of a multi-beam SAR imaging in an urban scenario, composed of various targets (buildings, cars, pedestrian, etc.), employing a 77 GHz multiple-input multiple-output (MIMO) radar platform based on a mass-market available automotive-grade technology. The results highlight a centimeter-level accuracy of the SAR images in realistic driving conditions, showing the possibility to use a multi-angle focusing approach to detect and discriminate between different targets based on their angular scattering response.
Deep Learning of Transferable MIMO Channel Modes for 6G V2X Communications
Aug 31, 2021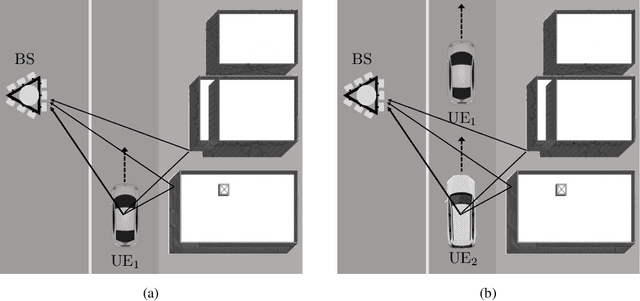
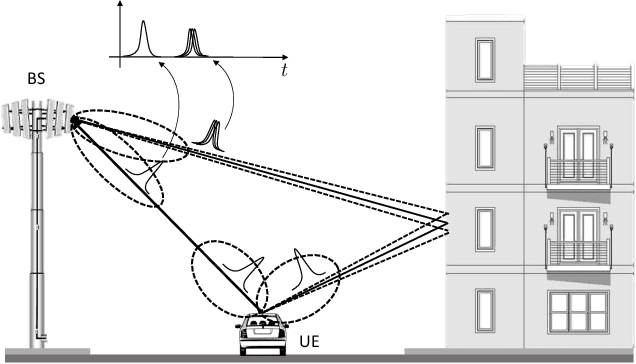
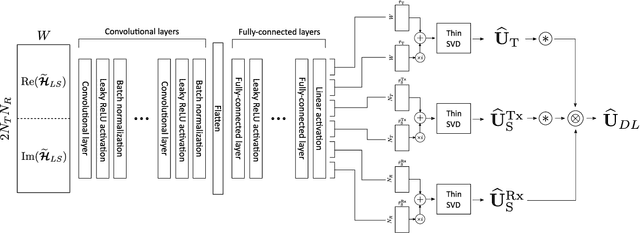
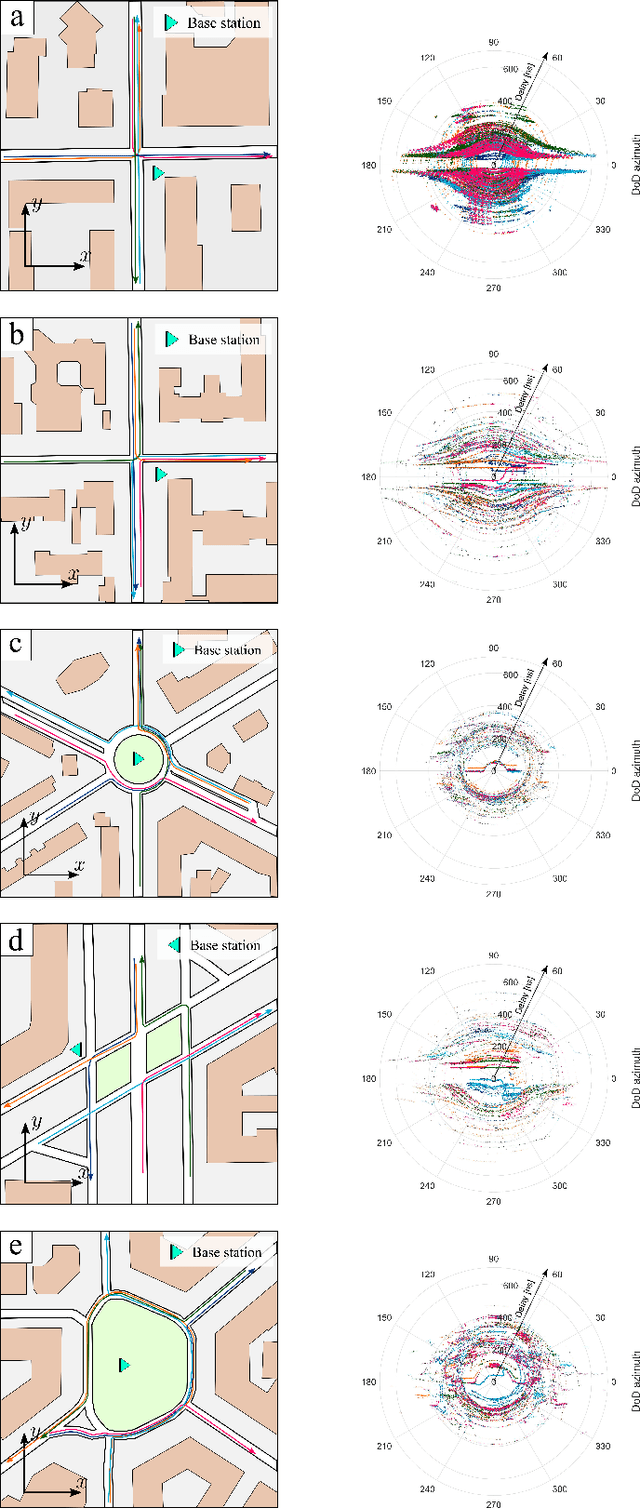
In the emerging high mobility Vehicle-to-Everything (V2X) communications using millimeter Wave (mmWave) and sub-THz, Multiple-Input Multiple-Output (MIMO) channel estimation is an extremely challenging task. At mmWaves/sub-THz frequencies, MIMO channels exhibit few leading paths in the space-time domain (i.e., directions or arrival/departure and delays). Algebraic Low-rank (LR) channel estimation exploits space-time channel sparsity through the computation of position-dependent MIMO channel eigenmodes leveraging recurrent training vehicle passages in the coverage cell. LR requires vehicles' geographical positions and tens to hundreds of training vehicles' passages for each position, leading to significant complexity and control signalling overhead. Here we design a DL-based LR channel estimation method to infer MIMO channel eigenmodes in V2X urban settings, starting from a single LS channel estimate and without needing vehicle's position information. Numerical results show that the proposed method attains comparable Mean Squared Error (MSE) performance as the position-based LR. Moreover, we show that the proposed model can be trained on a reference scenario and be effectively transferred to urban contexts with different space-time channel features, providing comparable MSE performance without an explicit transfer learning procedure. This result eases the deployment in arbitrary dense urban scenarios.
Position-agnostic Algebraic Estimation of 6G V2X MIMO Channels via Unsupervised Learning
Jul 26, 2021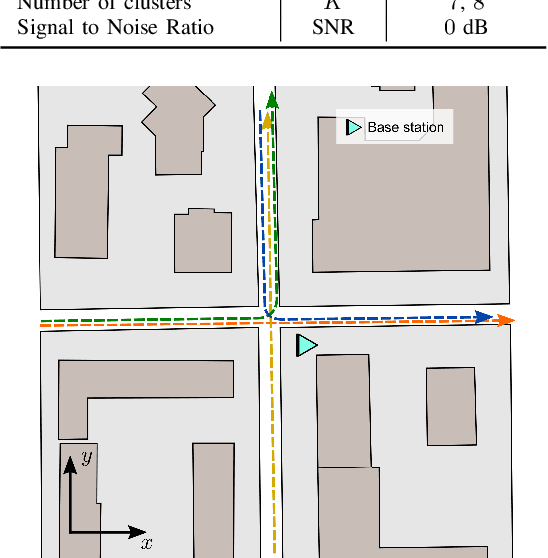
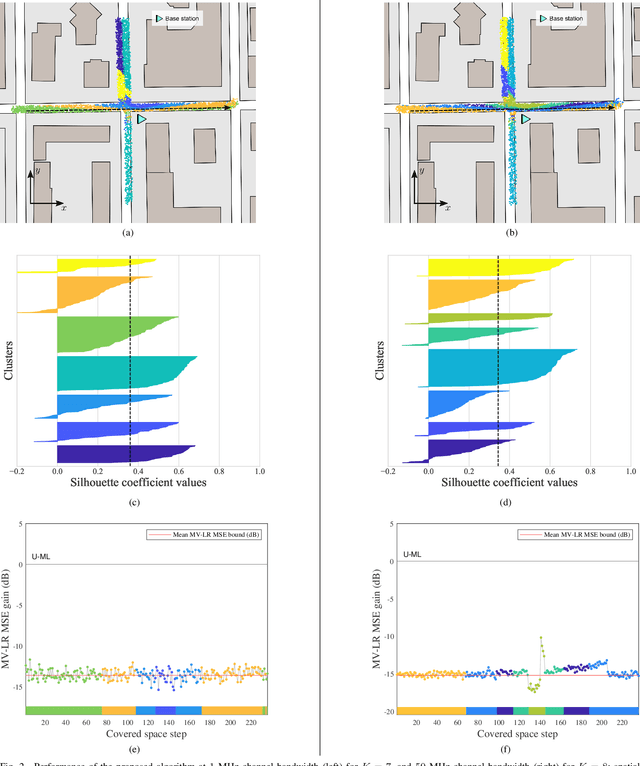
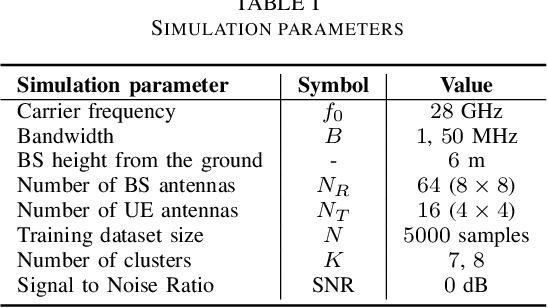
MIMO systems in the context of 6G Vehicle-to-Everything (V2X) will require an accurate channel knowledge to enable efficient communication. Standard channel estimation techniques, such as Unconstrained Maximum Likelihood (U-ML), are extremely noisy in massive MIMO settings, while structured approaches, e.g., compressed sensing, are suited to low-mobility scenarios and are sensitive to hardware impairments. We propose a novel Multi-Vehicular algebraic channel estimation method for 6G V2X based on unsupervised learning which exploits recurrent vehicle passages in typical urban settings. Multiple training sequences are clustered via K-medoids algorithm based on their \textit{algebraic similarity} to retrieve the MIMO channel eigenmodes, which can be used to improve the channel estimates. Numerical results show remarkable benefits of the proposed method in terms of Mean Squared Error (MSE) compared to standard U-ML solution (15 dB less).
Channel Estimation for 6G V2X HybridSystems using Multi-Vehicular Learning
May 21, 2021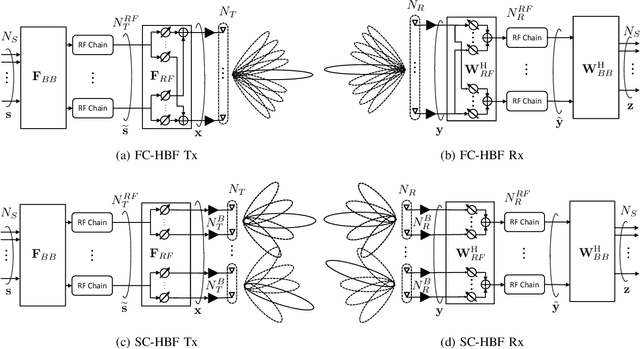
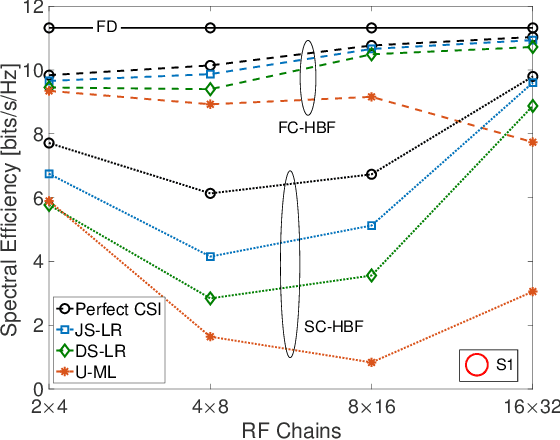
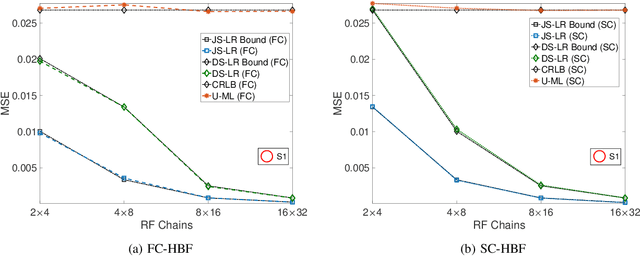
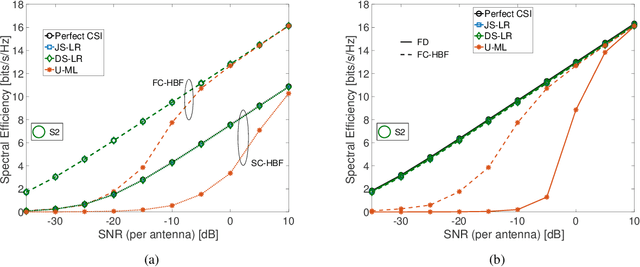
Channel estimation for hybrid Multiple Input Multiple Output (MIMO) systems at Millimeter-Waves (mmW)/sub-THz is a fundamental, despite challenging, prerequisite for an efficient design of hybrid MIMO precoding/combining. Most works propose sequential search algorithms, e.g., Compressive Sensing (CS), that are most suited to static channels and consequently cannot apply to highly dynamic scenarios such as Vehicle-to-Everything (V2X). To address the latter ones, we leverage \textit{recurrent vehicle passages} to design a novel Multi Vehicular (MV) hybrid MIMO channel estimation suited for Vehicle-to-Infrastructure (V2I) and Vehicle-to-Network (V2N) systems. Our approach derives the analog precoder/combiner through a MV beam alignment procedure. For the digital precoder/combiner, we adapt the Low-Rank (LR) channel estimation method to learn the position-dependent eigenmodes of the received digital signal (after beamforming), which is used to estimate the compressed channel in the communication phase. Extensive numerical simulations, obtained with ray-tracing channel data and realistic vehicle trajectories, demonstrate the benefits of our solution in terms of both achievable Spectral Efficiency (SE) and Mean Square Error (MSE) compared to the Unconstrained Maximum Likelihood (U-ML) estimate of the compressed digital channel, making it suitable for both 5G and future 6G systems. Most notably, in some scenarios, we obtain the performance of the optimal Fully Digital (FD) systems.
Enabling Simulation-Based Optimization Through Machine Learning: A Case Study on Antenna Design
Aug 29, 2019



Complex phenomena are generally modeled with sophisticated simulators that, depending on their accuracy, can be very demanding in terms of computational resources and simulation time. Their time-consuming nature, together with a typically vast parameter space to be explored, make simulation-based optimization often infeasible. In this work, we present a method that enables the optimization of complex systems through Machine Learning (ML) techniques. We show how well-known learning algorithms are able to reliably emulate a complex simulator with a modest dataset obtained from it. The trained emulator is then able to yield values close to the simulated ones in virtually no time. Therefore, it is possible to perform a global numerical optimization over the vast multi-dimensional parameter space, in a fraction of the time that would be required by a simple brute-force search. As a testbed for the proposed methodology, we used a network simulator for next-generation mmWave cellular systems. After simulating several antenna configurations and collecting the resulting network-level statistics, we feed it into our framework. Results show that, even with few data points, extrapolating a continuous model makes it possible to estimate the global optimum configuration almost instantaneously. The very same tool can then be used to achieve any further optimization goal on the same input parameters in negligible time.