 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocalizing the Vehicle's Antenna: an Open Problem in 6G Network Sensing
Paper and Code
Apr 03, 2022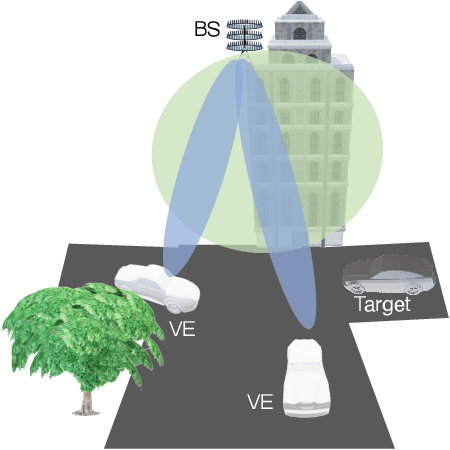
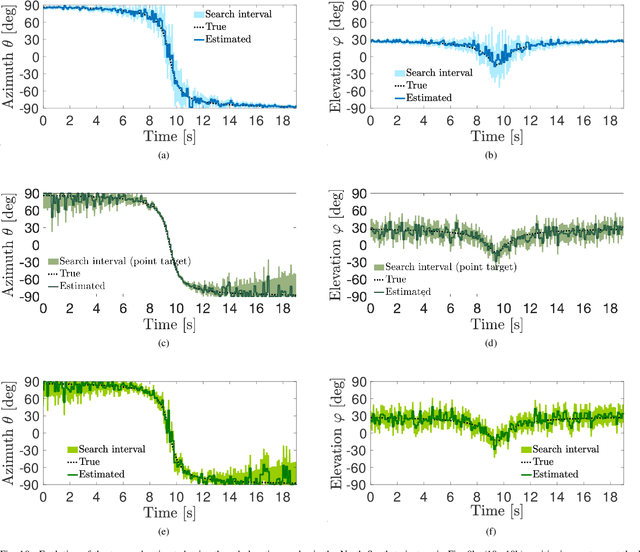
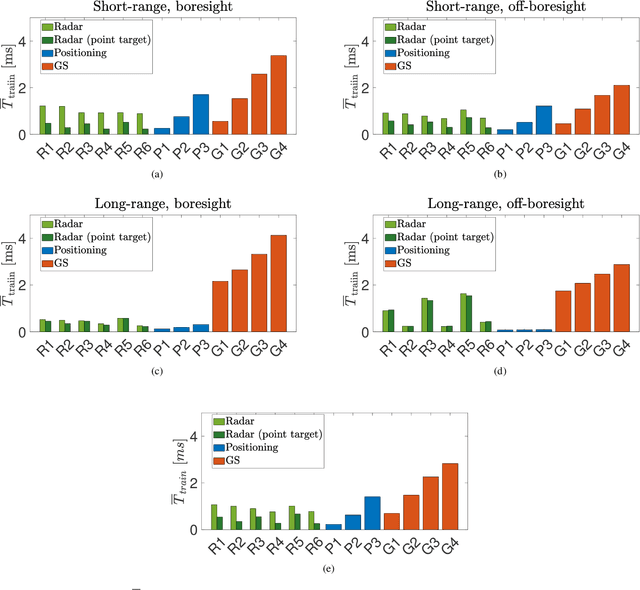
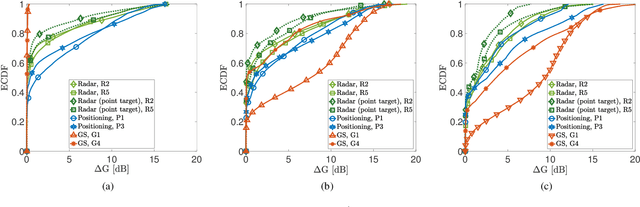
Millimeter Waves (mmW) and sub-THz frequencies are the candidate bands for the upcoming Sixth Generation (6G) of communication systems. The use of collimated beams at mmW/sub-THz to compensate for the increased path and penetration loss arises the need for a seamless Beam Management (BM), especially for high mobility scenarios such as the Vehicle-to-Infrastructure (V2I) one. Recent research advances in Integrated Sensing and Communication (ISAC) indicate that equipping the network infrastructure, e.g., the Base Station (BS), with either a stand-alone radar or sensing capabilities using optimized waveforms, represents the killer technology to facilitate the BM. However, radio sensing should accurately localize the Vehicular Equipment (VE)'s antenna, which is not guaranteed in general. Differently, employing side information from VE's onboard positioning sensors might overcome this limitation at the price of an increased control signaling between VE and BS. This paper provides a pragmatic comparison between radar-assisted and position-assisted BM for mmW V2I systems in a typical urban scenario in terms of BM training time and beamforming gain loss due to a wrong BM decision. Simulation results, supported by experimental evidence, show that the point target approximation of a traveling VE does not hold in practical V2I scenarios with radar-equipped BS. Therefore, the true antenna position has a residual uncertainty that is independent of radar's resolution and implies 50\,\% more BM training time on average. Moreover, there is not a winning technology for BM between BS-mounted radar and VE's onboard positioning systems. They provide complementary performance, depending on position, although outperforming blind BM techniques compared to conventional blind methods. Thus, we propose to optimally combine radar and positioning information in a multi-technology integrated BM solution.