 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChartwin: a Case Study on Channel Charting-aided Localization in Dynamic Digital Network Twins
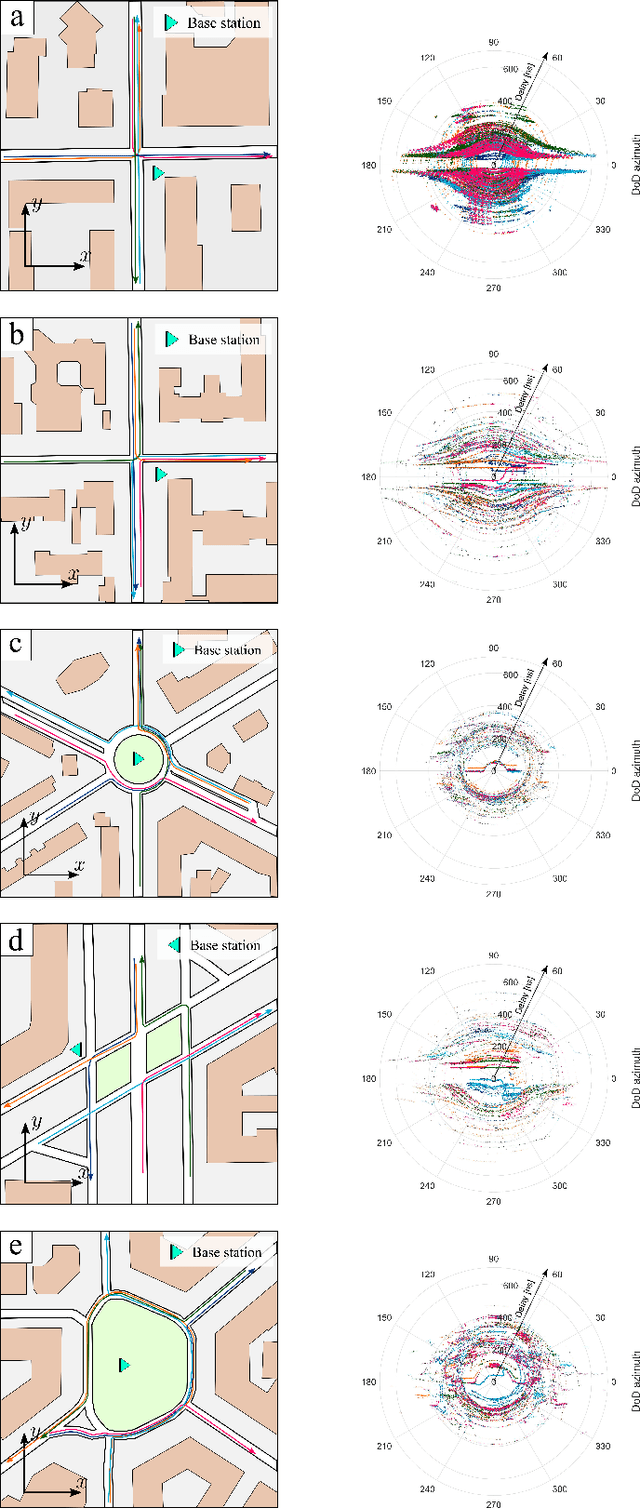
Aug 12, 2025Wireless communication systems can significantly benefit from the availability of spatially consistent representations of the wireless channel to efficiently perform a wide range of communication tasks. Towards this purpose, channel charting has been introduced as an effective unsupervised learning technique to achieve both locally and globally consistent radio maps. In this letter, we propose Chartwin, a case study on the integration of localization-oriented channel charting with dynamic Digital Network Twins (DNTs). Numerical results showcase the significant performance of semi-supervised channel charting in constructing a spatially consistent chart of the considered extended urban environment. The considered method results in $\approx$ 4.5 m localization error for the static DNT and $\approx$ 6 m in the dynamic DNT, fostering DNT-aided channel charting and localization.
Exploiting Age of Information in Network Digital Twins for AI-driven Real-Time Link Blockage Detection
May 21, 2025The Line-of-Sight (LoS) identification is crucial to ensure reliable high-frequency communication links, especially those vulnerable to blockages. Network Digital Twins and Artificial Intelligence are key technologies enabling blockage detection (LoS identification) for high-frequency wireless systems, e.g., 6>GHz. In this work, we enhance Network Digital Twins by incorporating Age of Information (AoI) metrics, a quantification of status update freshness, enabling reliable real-time blockage detection (LoS identification) in dynamic wireless environments. By integrating raytracing techniques, we automate large-scale collection and labeling of channel data, specifically tailored to the evolving conditions of the environment. The introduced AoI is integrated with the loss function to prioritize more recent information to fine-tune deep learning models in case of performance degradation (model drift). The effectiveness of the proposed solution is demonstrated in realistic urban simulations, highlighting the trade-off between input resolution, computational cost, and model performance. A resolution reduction of 4x8 from an original channel sample size of (32, 1024) along the angle and subcarrier dimension results in a computational speedup of 32 times. The proposed fine-tuning successfully mitigates performance degradation while requiring only 1% of the available data samples, enabling automated and fast mitigation of model drifts.
AI-empowered Real-Time Line-of-Sight Identification via Network Digital Twins
May 21, 2025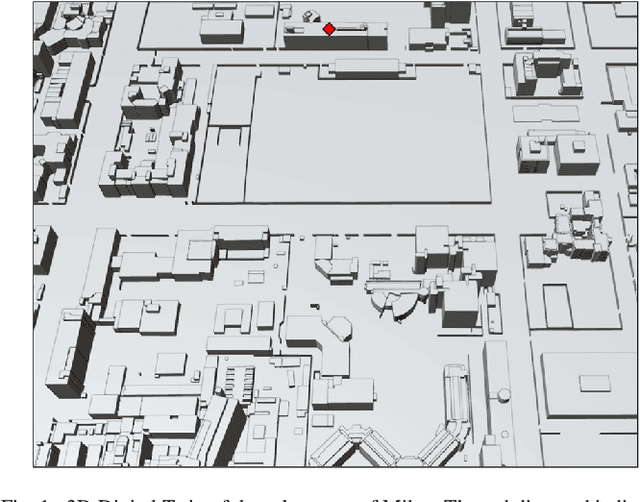
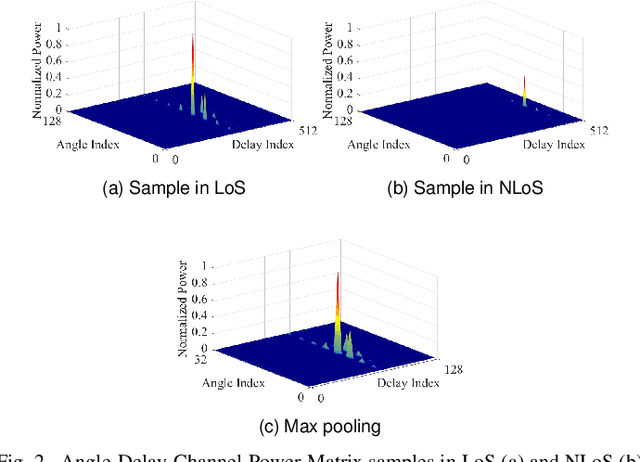
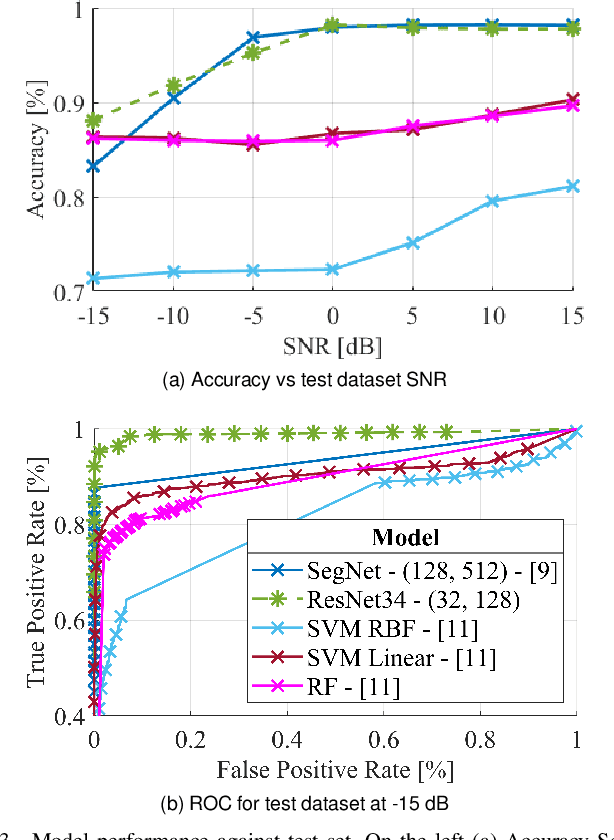
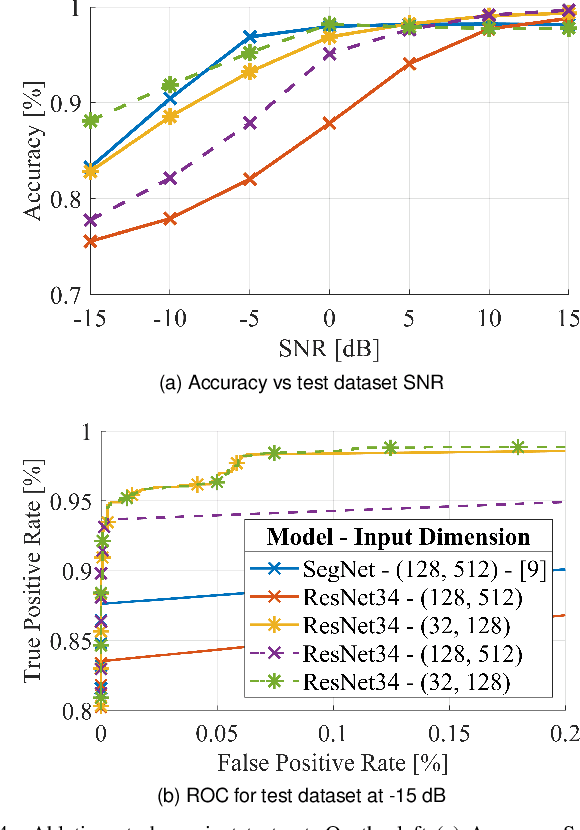
The identification of Line-of-Sight (LoS) conditions is critical for ensuring reliable high-frequency communication links, which are particularly vulnerable to blockages and rapid channel variations. Network Digital Twins (NDTs) and Ray-Tracing (RT) techniques can significantly automate the large-scale collection and labeling of channel data, tailored to specific wireless environments. This paper examines the quality of Artificial Intelligence (AI) models trained on data generated by Network Digital Twins. We propose and evaluate training strategies for a general-purpose Deep Learning model, demonstrating superior performance compared to the current state-of-the-art. In terms of classification accuracy, our approach outperforms the state-of-the-art Deep Learning model by 5% in very low SNR conditions and by approximately 10% in medium-to-high SNR scenarios. Additionally, the proposed strategies effectively reduce the input size to the Deep Learning model while preserving its performance. The computational cost, measured in floating-point operations per second (FLOPs) during inference, is reduced by 98.55% relative to state-of-the-art solutions, making it ideal for real-time applications.
Deep Learning-based Target-To-User Association in Integrated Sensing and Communication Systems
Jan 11, 2024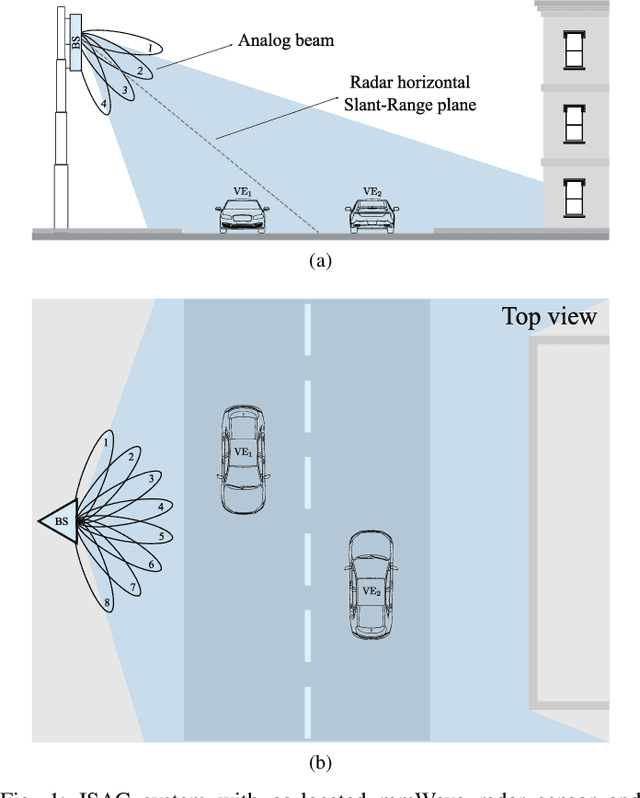
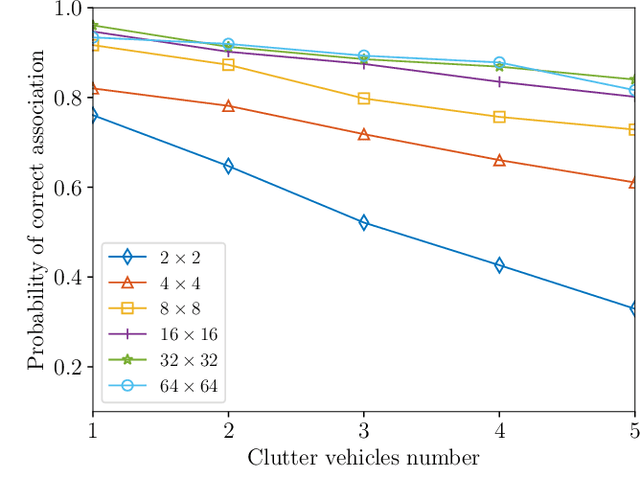
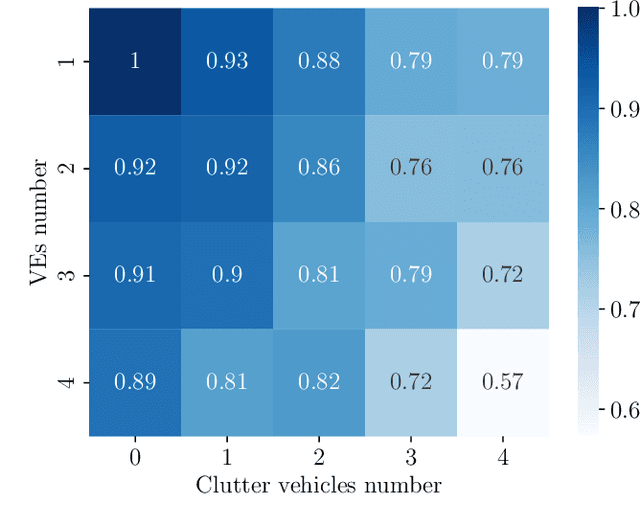
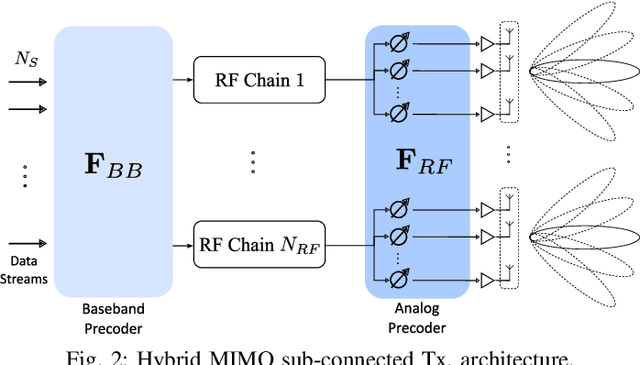
In Integrated Sensing and Communication (ISAC) systems, matching the radar targets with communication user equipments (UEs) is functional to several communication tasks, such as proactive handover and beam prediction. In this paper, we consider a radar-assisted communication system where a base station (BS) is equipped with a multiple-input-multiple-output (MIMO) radar that has a double aim: (i) associate vehicular radar targets to vehicular equipments (VEs) in the communication beamspace and (ii) predict the beamforming vector for each VE from radar data. The proposed target-to-user (T2U) association consists of two stages. First, vehicular radar targets are detected from range-angle images, and, for each, a beamforming vector is estimated. Then, the inferred per-target beamforming vectors are matched with the ones utilized at the BS for communication to perform target-to-user (T2U) association. Joint multi-target detection and beam inference is obtained by modifying the you only look once (YOLO) model, which is trained over simulated range-angle radar images. Simulation results over different urban vehicular mobility scenarios show that the proposed T2U method provides a probability of correct association that increases with the size of the BS antenna array, highlighting the respective increase of the separability of the VEs in the beamspace. Moreover, we show that the modified YOLO architecture can effectively perform both beam prediction and radar target detection, with similar performance in mean average precision on the latter over different antenna array sizes.
Target-to-User Association in ISAC Systems With Vehicle-Lodged RIS
Mar 14, 2023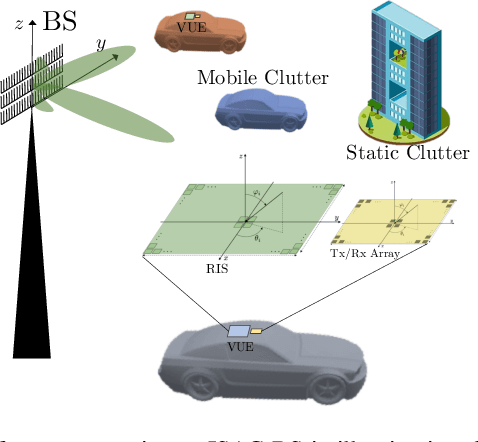
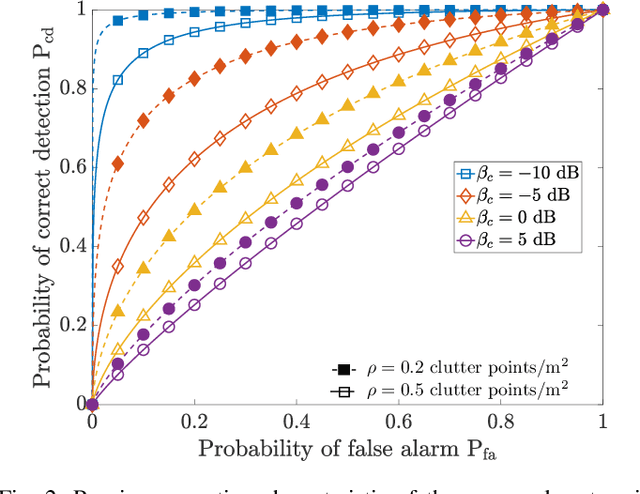
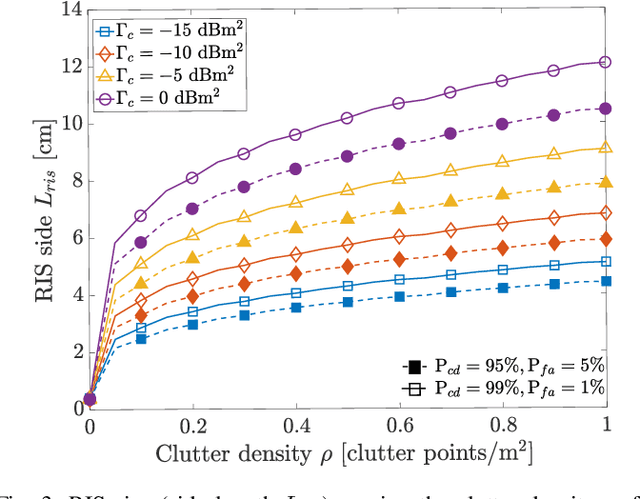
Target-to-user (T2U) association is a prerequisite to fully exploit the potential of the sensing function in communication-centric integrated sensing and communication (ISAC) systems, e.g., for beam and blockage management. This letter proposes to purposely mount a RIS on the roof of the vehicular user equipment (VUE), which can serve as an intentional back-reflector towards the base station. By controlling the reflection pattern over time, it is possible to transmit information to the sensing system, i.e., back-reflection as bit 1, no back-reflection as bit 0. The VUEs are configured to back-reflect a Hadamard code sequence, which enables T2U association. The numerical results confirm the validity of our proposal.
Integrated Sensing and Communication System via Dual-Domain Waveform Superposition
Dec 15, 2022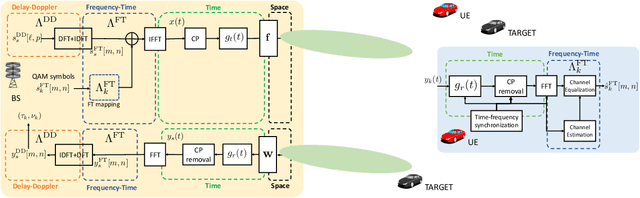
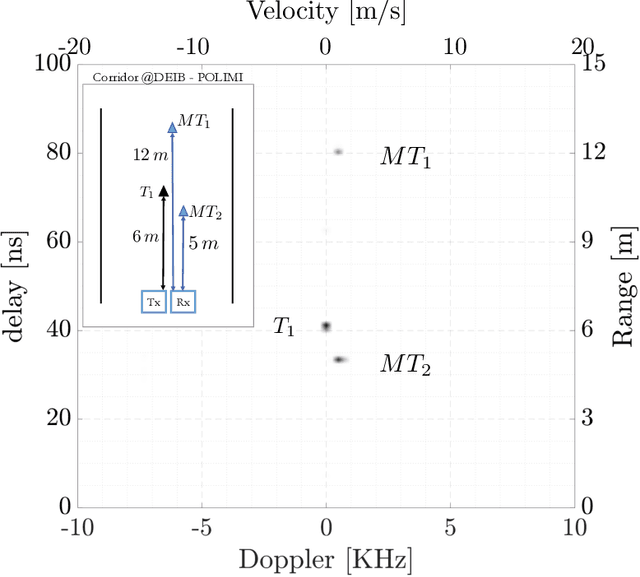
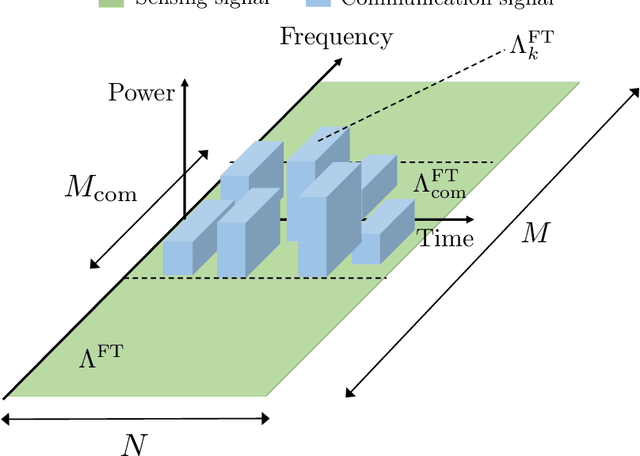
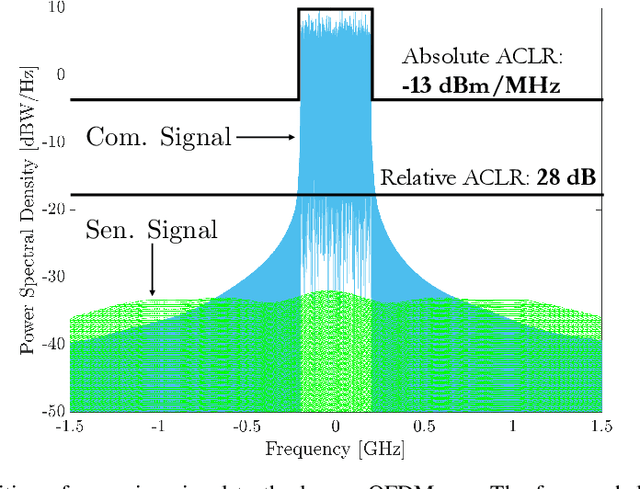
Integrated Sensing and Communication (ISAC) systems are recognised as one of the key ingredients of the sixth generation (6G) network. A challenging topic in ISAC is the design of a single waveform combining both communication and sensing functionalities on the same time-frequency-space resources, allowing to tune the performance of both with partial or full hardware sharing. This paper proposes a dual-domain waveform design approach that superposes onto the frequency-time (FT) domain both the legacy orthogonal frequency division multiplexing (OFDM) signal and a sensing one, purposely designed in the delay-Doppler domain. With a proper power downscaling of the sensing signal w.r.t. OFDM, it is possible to exceed regulatory bandwidth limitations proper of legacy multicarrier systems to increase the sensing performance while leaving communication substantially unaffected. Numerical and experimental results prove the effectiveness of the dual-domain waveform, notwithstanding a power abatement of at least 30 dB of the signal used for sensing compared to the one used for communication. The dual-domain ISAC waveform outperforms both OFDM and orthogonal time-frequency-space (OTFS) in terms of Cram\'{e}r-Rao bound on delay estimation (up to 20 dB), thanks to its superior resolution, with a negligible penalty on the achievable rate.
Localizing the Vehicle's Antenna: an Open Problem in 6G Network Sensing
Apr 03, 2022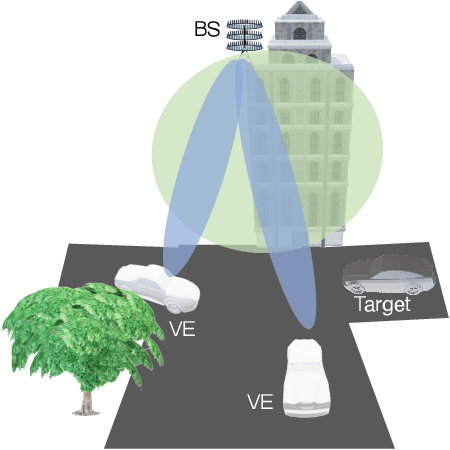
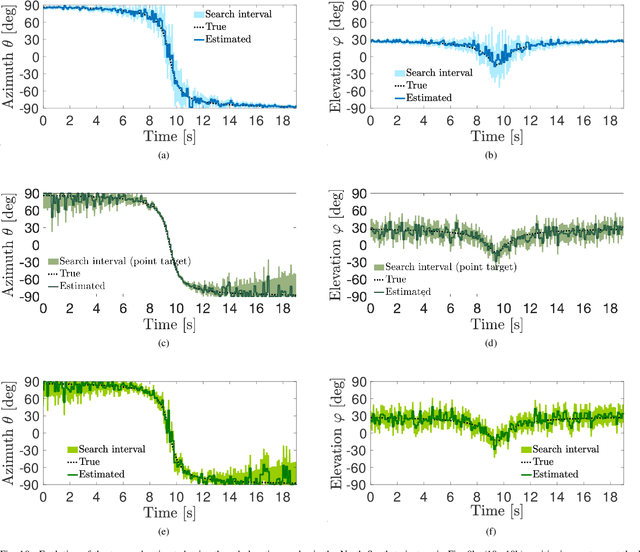
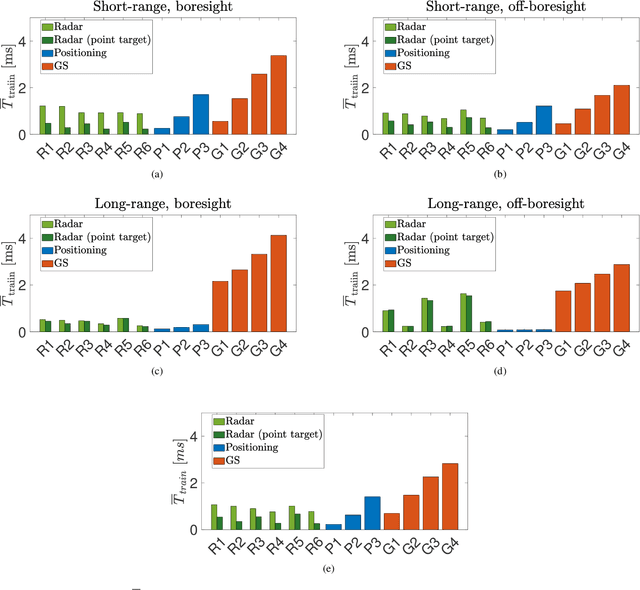
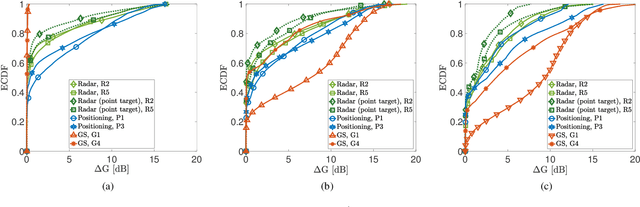
Millimeter Waves (mmW) and sub-THz frequencies are the candidate bands for the upcoming Sixth Generation (6G) of communication systems. The use of collimated beams at mmW/sub-THz to compensate for the increased path and penetration loss arises the need for a seamless Beam Management (BM), especially for high mobility scenarios such as the Vehicle-to-Infrastructure (V2I) one. Recent research advances in Integrated Sensing and Communication (ISAC) indicate that equipping the network infrastructure, e.g., the Base Station (BS), with either a stand-alone radar or sensing capabilities using optimized waveforms, represents the killer technology to facilitate the BM. However, radio sensing should accurately localize the Vehicular Equipment (VE)'s antenna, which is not guaranteed in general. Differently, employing side information from VE's onboard positioning sensors might overcome this limitation at the price of an increased control signaling between VE and BS. This paper provides a pragmatic comparison between radar-assisted and position-assisted BM for mmW V2I systems in a typical urban scenario in terms of BM training time and beamforming gain loss due to a wrong BM decision. Simulation results, supported by experimental evidence, show that the point target approximation of a traveling VE does not hold in practical V2I scenarios with radar-equipped BS. Therefore, the true antenna position has a residual uncertainty that is independent of radar's resolution and implies 50\,\% more BM training time on average. Moreover, there is not a winning technology for BM between BS-mounted radar and VE's onboard positioning systems. They provide complementary performance, depending on position, although outperforming blind BM techniques compared to conventional blind methods. Thus, we propose to optimally combine radar and positioning information in a multi-technology integrated BM solution.
Deep Learning of Transferable MIMO Channel Modes for 6G V2X Communications
Aug 31, 2021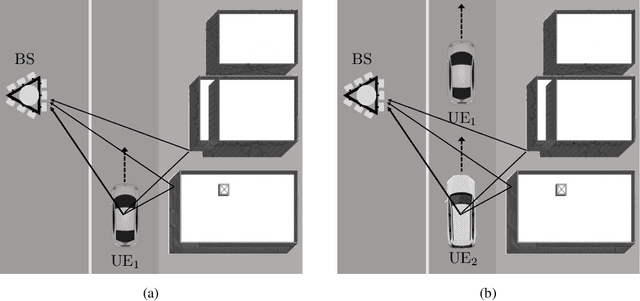
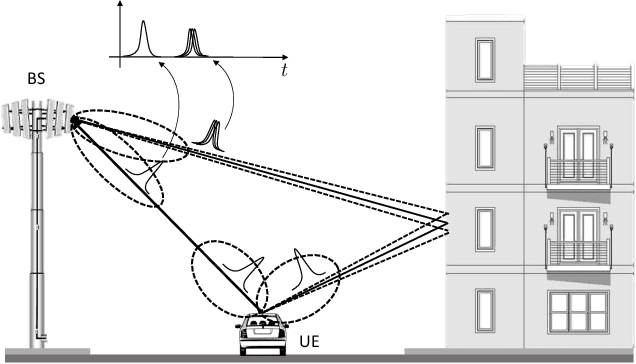
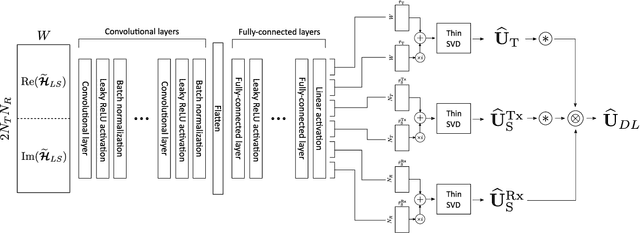
In the emerging high mobility Vehicle-to-Everything (V2X) communications using millimeter Wave (mmWave) and sub-THz, Multiple-Input Multiple-Output (MIMO) channel estimation is an extremely challenging task. At mmWaves/sub-THz frequencies, MIMO channels exhibit few leading paths in the space-time domain (i.e., directions or arrival/departure and delays). Algebraic Low-rank (LR) channel estimation exploits space-time channel sparsity through the computation of position-dependent MIMO channel eigenmodes leveraging recurrent training vehicle passages in the coverage cell. LR requires vehicles' geographical positions and tens to hundreds of training vehicles' passages for each position, leading to significant complexity and control signalling overhead. Here we design a DL-based LR channel estimation method to infer MIMO channel eigenmodes in V2X urban settings, starting from a single LS channel estimate and without needing vehicle's position information. Numerical results show that the proposed method attains comparable Mean Squared Error (MSE) performance as the position-based LR. Moreover, we show that the proposed model can be trained on a reference scenario and be effectively transferred to urban contexts with different space-time channel features, providing comparable MSE performance without an explicit transfer learning procedure. This result eases the deployment in arbitrary dense urban scenarios.
Position-agnostic Algebraic Estimation of 6G V2X MIMO Channels via Unsupervised Learning
Jul 26, 2021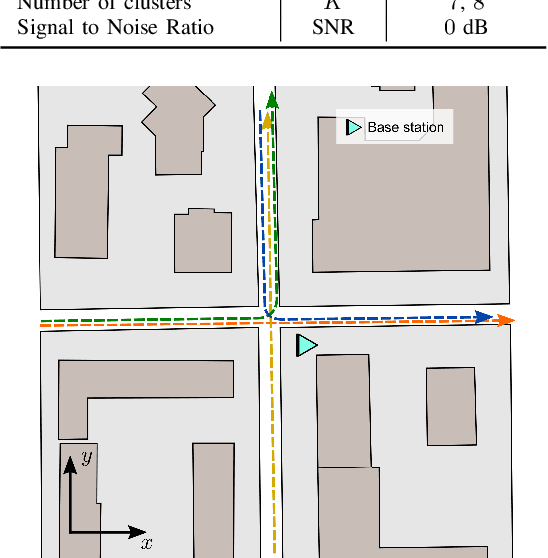
MIMO systems in the context of 6G Vehicle-to-Everything (V2X) will require an accurate channel knowledge to enable efficient communication. Standard channel estimation techniques, such as Unconstrained Maximum Likelihood (U-ML), are extremely noisy in massive MIMO settings, while structured approaches, e.g., compressed sensing, are suited to low-mobility scenarios and are sensitive to hardware impairments. We propose a novel Multi-Vehicular algebraic channel estimation method for 6G V2X based on unsupervised learning which exploits recurrent vehicle passages in typical urban settings. Multiple training sequences are clustered via K-medoids algorithm based on their \textit{algebraic similarity} to retrieve the MIMO channel eigenmodes, which can be used to improve the channel estimates. Numerical results show remarkable benefits of the proposed method in terms of Mean Squared Error (MSE) compared to standard U-ML solution (15 dB less).
Channel Estimation for 6G V2X HybridSystems using Multi-Vehicular Learning
May 21, 2021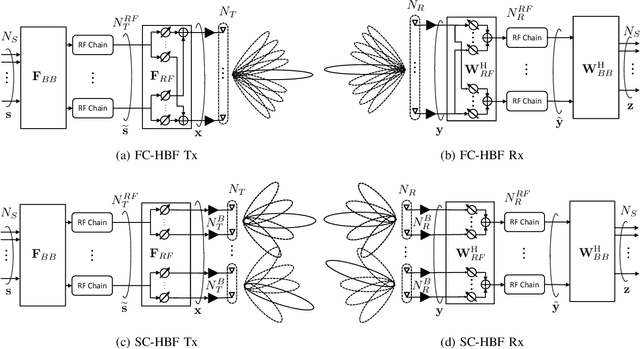
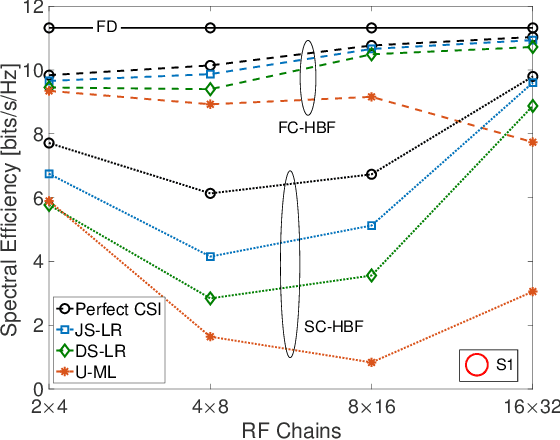
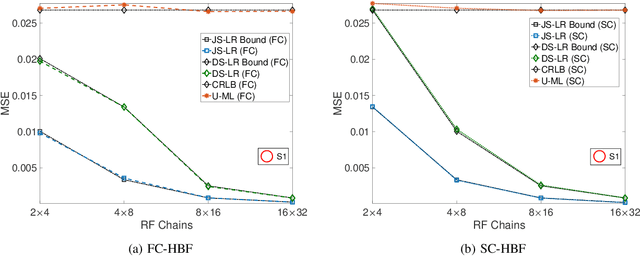
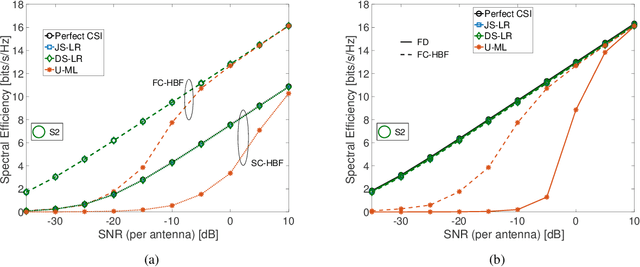
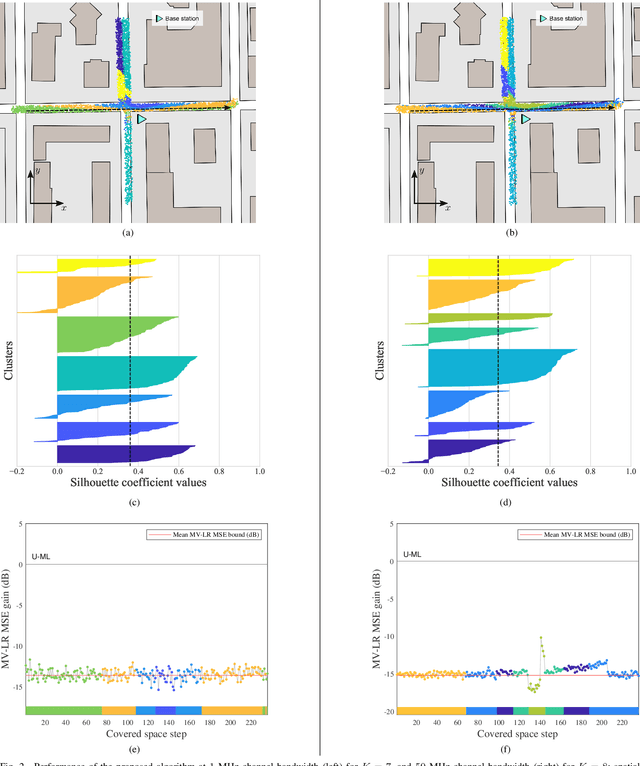
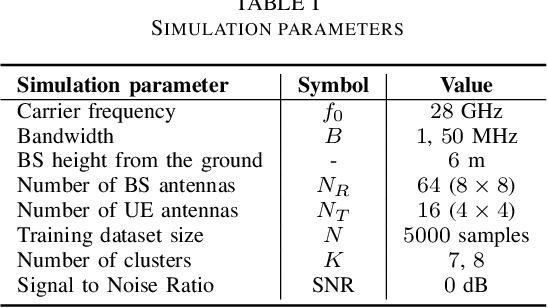
Channel estimation for hybrid Multiple Input Multiple Output (MIMO) systems at Millimeter-Waves (mmW)/sub-THz is a fundamental, despite challenging, prerequisite for an efficient design of hybrid MIMO precoding/combining. Most works propose sequential search algorithms, e.g., Compressive Sensing (CS), that are most suited to static channels and consequently cannot apply to highly dynamic scenarios such as Vehicle-to-Everything (V2X). To address the latter ones, we leverage \textit{recurrent vehicle passages} to design a novel Multi Vehicular (MV) hybrid MIMO channel estimation suited for Vehicle-to-Infrastructure (V2I) and Vehicle-to-Network (V2N) systems. Our approach derives the analog precoder/combiner through a MV beam alignment procedure. For the digital precoder/combiner, we adapt the Low-Rank (LR) channel estimation method to learn the position-dependent eigenmodes of the received digital signal (after beamforming), which is used to estimate the compressed channel in the communication phase. Extensive numerical simulations, obtained with ray-tracing channel data and realistic vehicle trajectories, demonstrate the benefits of our solution in terms of both achievable Spectral Efficiency (SE) and Mean Square Error (MSE) compared to the Unconstrained Maximum Likelihood (U-ML) estimate of the compressed digital channel, making it suitable for both 5G and future 6G systems. Most notably, in some scenarios, we obtain the performance of the optimal Fully Digital (FD) systems.