 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChartwin: a Case Study on Channel Charting-aided Localization in Dynamic Digital Network Twins
Aug 12, 2025Wireless communication systems can significantly benefit from the availability of spatially consistent representations of the wireless channel to efficiently perform a wide range of communication tasks. Towards this purpose, channel charting has been introduced as an effective unsupervised learning technique to achieve both locally and globally consistent radio maps. In this letter, we propose Chartwin, a case study on the integration of localization-oriented channel charting with dynamic Digital Network Twins (DNTs). Numerical results showcase the significant performance of semi-supervised channel charting in constructing a spatially consistent chart of the considered extended urban environment. The considered method results in $\approx$ 4.5 m localization error for the static DNT and $\approx$ 6 m in the dynamic DNT, fostering DNT-aided channel charting and localization.
AI-empowered Real-Time Line-of-Sight Identification via Network Digital Twins
May 21, 2025
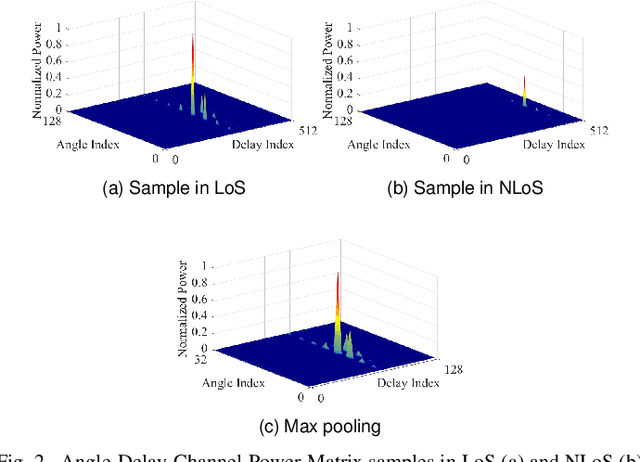
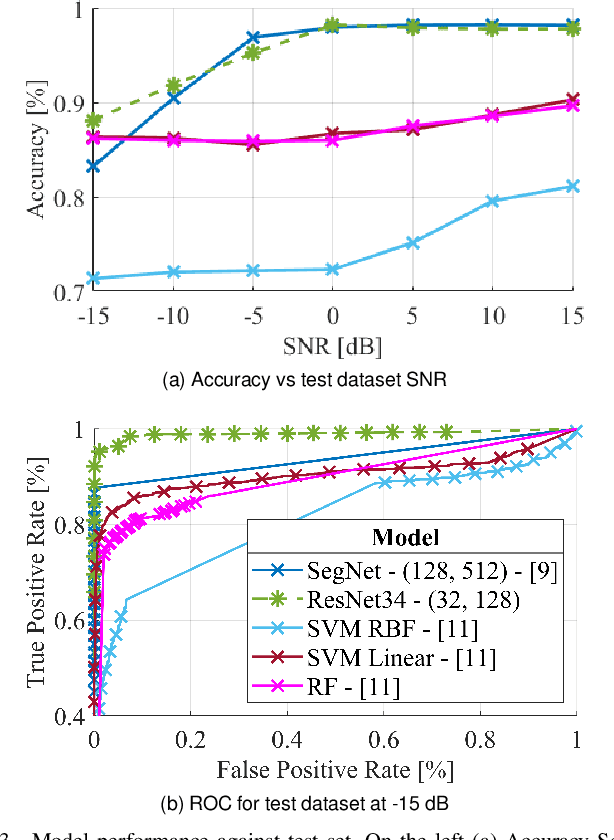
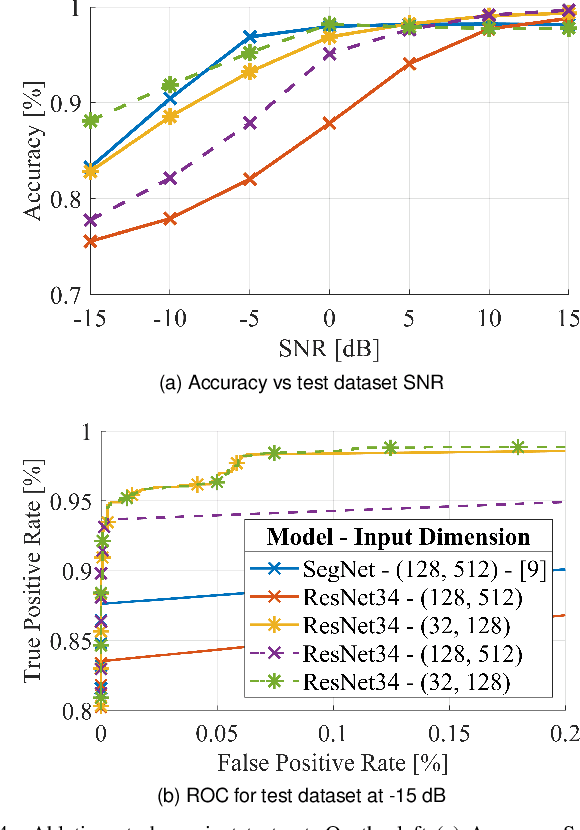
The identification of Line-of-Sight (LoS) conditions is critical for ensuring reliable high-frequency communication links, which are particularly vulnerable to blockages and rapid channel variations. Network Digital Twins (NDTs) and Ray-Tracing (RT) techniques can significantly automate the large-scale collection and labeling of channel data, tailored to specific wireless environments. This paper examines the quality of Artificial Intelligence (AI) models trained on data generated by Network Digital Twins. We propose and evaluate training strategies for a general-purpose Deep Learning model, demonstrating superior performance compared to the current state-of-the-art. In terms of classification accuracy, our approach outperforms the state-of-the-art Deep Learning model by 5% in very low SNR conditions and by approximately 10% in medium-to-high SNR scenarios. Additionally, the proposed strategies effectively reduce the input size to the Deep Learning model while preserving its performance. The computational cost, measured in floating-point operations per second (FLOPs) during inference, is reduced by 98.55% relative to state-of-the-art solutions, making it ideal for real-time applications.
Exploiting Age of Information in Network Digital Twins for AI-driven Real-Time Link Blockage Detection
May 21, 2025The Line-of-Sight (LoS) identification is crucial to ensure reliable high-frequency communication links, especially those vulnerable to blockages. Network Digital Twins and Artificial Intelligence are key technologies enabling blockage detection (LoS identification) for high-frequency wireless systems, e.g., 6>GHz. In this work, we enhance Network Digital Twins by incorporating Age of Information (AoI) metrics, a quantification of status update freshness, enabling reliable real-time blockage detection (LoS identification) in dynamic wireless environments. By integrating raytracing techniques, we automate large-scale collection and labeling of channel data, specifically tailored to the evolving conditions of the environment. The introduced AoI is integrated with the loss function to prioritize more recent information to fine-tune deep learning models in case of performance degradation (model drift). The effectiveness of the proposed solution is demonstrated in realistic urban simulations, highlighting the trade-off between input resolution, computational cost, and model performance. A resolution reduction of 4x8 from an original channel sample size of (32, 1024) along the angle and subcarrier dimension results in a computational speedup of 32 times. The proposed fine-tuning successfully mitigates performance degradation while requiring only 1% of the available data samples, enabling automated and fast mitigation of model drifts.
Digital Twins of the EM Environment: Benchmark for Ray Launching Models
Jun 07, 2024
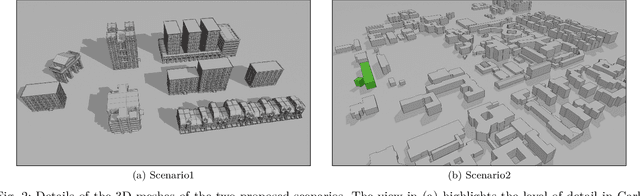
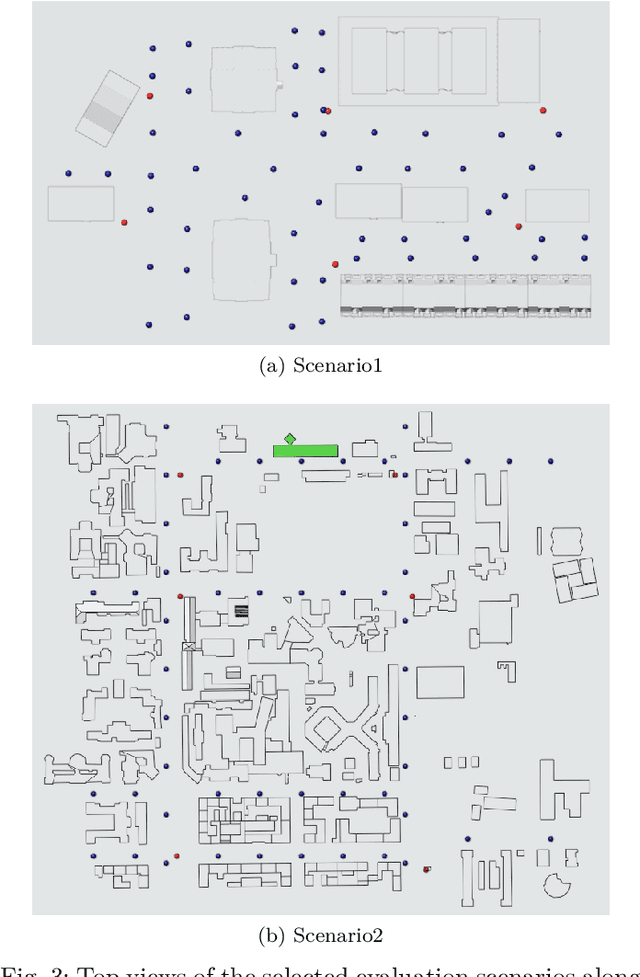
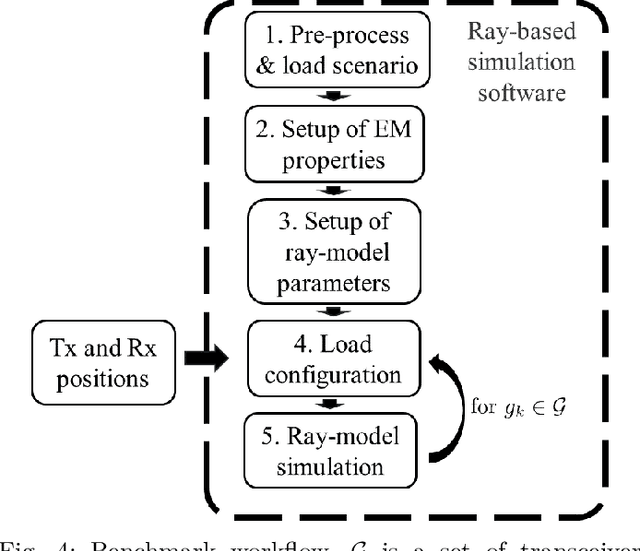
Digital Twin has emerged as a promising paradigm for accurately representing the electromagnetic (EM) wireless environments. The resulting virtual representation of the reality facilitates comprehensive insights into the propagation environment, empowering multi-layer decision-making processes at the physical communication level. This paper investigates the digitization of wireless communication propagation, with particular emphasis on the indispensable aspect of ray-based propagation simulation for real-time Digital Twins. A benchmark for ray-based propagation simulations is presented to evaluate computational time, with two urban scenarios characterized by different mesh complexity, single and multiple wireless link configurations, and simulations with/without diffuse scattering. Exhaustive empirical analyses are performed showing and comparing the behavior of different ray-based solutions. By offering standardized simulations and scenarios, this work provides a technical benchmark for practitioners involved in the implementation of real-time Digital Twins and optimization of ray-based propagation models.
Deep Learning-based Target-To-User Association in Integrated Sensing and Communication Systems
Jan 11, 2024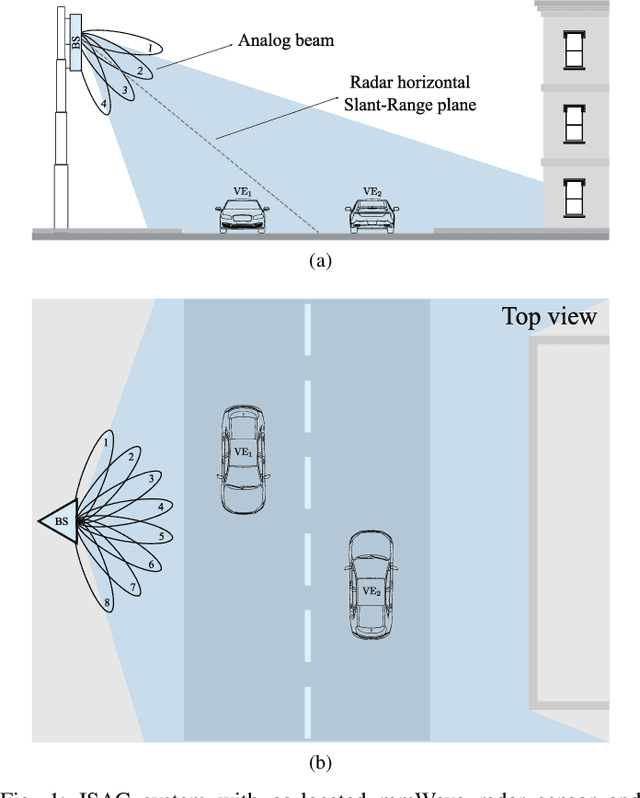
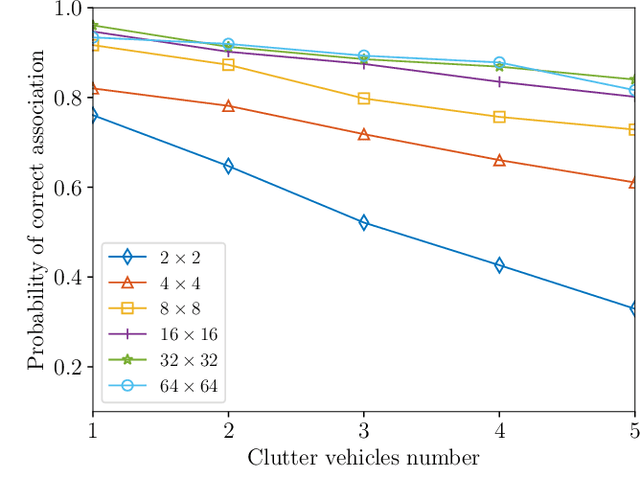
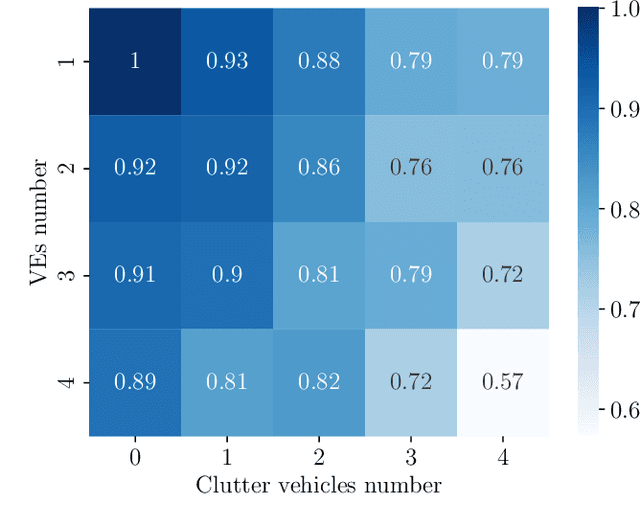
In Integrated Sensing and Communication (ISAC) systems, matching the radar targets with communication user equipments (UEs) is functional to several communication tasks, such as proactive handover and beam prediction. In this paper, we consider a radar-assisted communication system where a base station (BS) is equipped with a multiple-input-multiple-output (MIMO) radar that has a double aim: (i) associate vehicular radar targets to vehicular equipments (VEs) in the communication beamspace and (ii) predict the beamforming vector for each VE from radar data. The proposed target-to-user (T2U) association consists of two stages. First, vehicular radar targets are detected from range-angle images, and, for each, a beamforming vector is estimated. Then, the inferred per-target beamforming vectors are matched with the ones utilized at the BS for communication to perform target-to-user (T2U) association. Joint multi-target detection and beam inference is obtained by modifying the you only look once (YOLO) model, which is trained over simulated range-angle radar images. Simulation results over different urban vehicular mobility scenarios show that the proposed T2U method provides a probability of correct association that increases with the size of the BS antenna array, highlighting the respective increase of the separability of the VEs in the beamspace. Moreover, we show that the modified YOLO architecture can effectively perform both beam prediction and radar target detection, with similar performance in mean average precision on the latter over different antenna array sizes.
A Multi-Modal Simulation Framework to Enable Digital Twin-based V2X Communications in Dynamic Environments
Apr 03, 2023



Digital Twins (DTs) for physical wireless environments have been recently proposed as accurate virtual representations of the propagation environment that can enable multi-layer decisions at the physical communication equipment. At high frequency bands, DTs can help to overcome the challenges emerging in the high mobility conditions featuring vehicular environments. In this paper, we propose a novel data-driven workflow for the creation of the DT of a Vehicle-to-Everything (V2X) communication scenario and a multi-modal simulation framework for the generation of realistic sensor data and accurate mmWave/sub-THz wireless channels. The proposed method leverages an automotive simulation and testing framework based on the Unreal Engine game engine and an accurate ray-tracing channel simulator. Simulations over an urban scenario show the achievable realistic sensor and channel modelling both at the infrastructure and at an ego-vehicle.
A Generative Federated Learning Framework for Differential Privacy
Sep 24, 2021



In machine learning, differential privacy and federated learning concepts are gaining more and more importance in an increasingly interconnected world. While the former refers to the sharing of private data characterized by strict security rules to protect individual privacy, the latter refers to distributed learning techniques in which a central server exchanges information with different clients for machine learning purposes. In recent years, many studies have shown the possibility of bypassing the privacy shields of these systems and exploiting the vulnerabilities of machine learning models, making them leak the information with which they have been trained. In this work, we present the 3DGL framework, an alternative to the current federated learning paradigms. Its goal is to share generative models with high levels of $\varepsilon$-differential privacy. In addition, we propose DDP-$\beta$VAE, a deep generative model capable of generating synthetic data with high levels of utility and safety for the individual. We evaluate the 3DGL framework based on DDP-$\beta$VAE, showing how the overall system is resilient to the principal attacks in federated learning and improves the performance of distributed learning algorithms.
Deep Learning of Transferable MIMO Channel Modes for 6G V2X Communications
Aug 31, 2021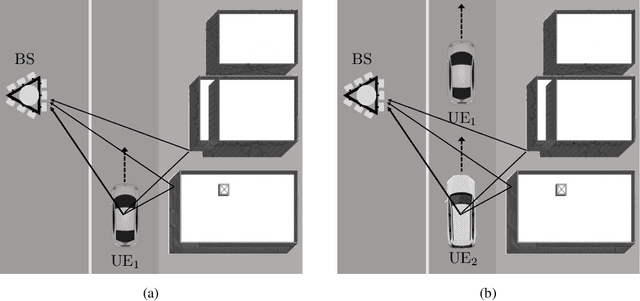
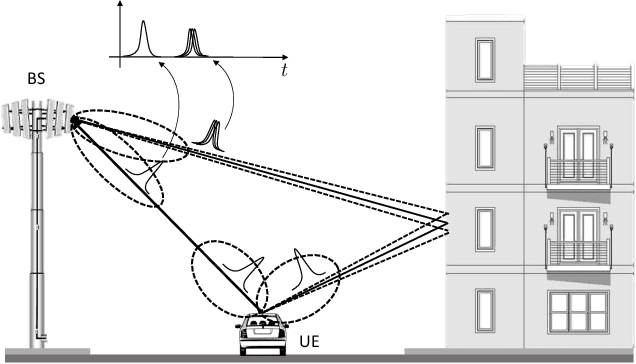
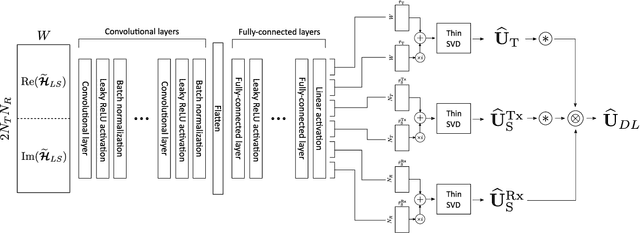
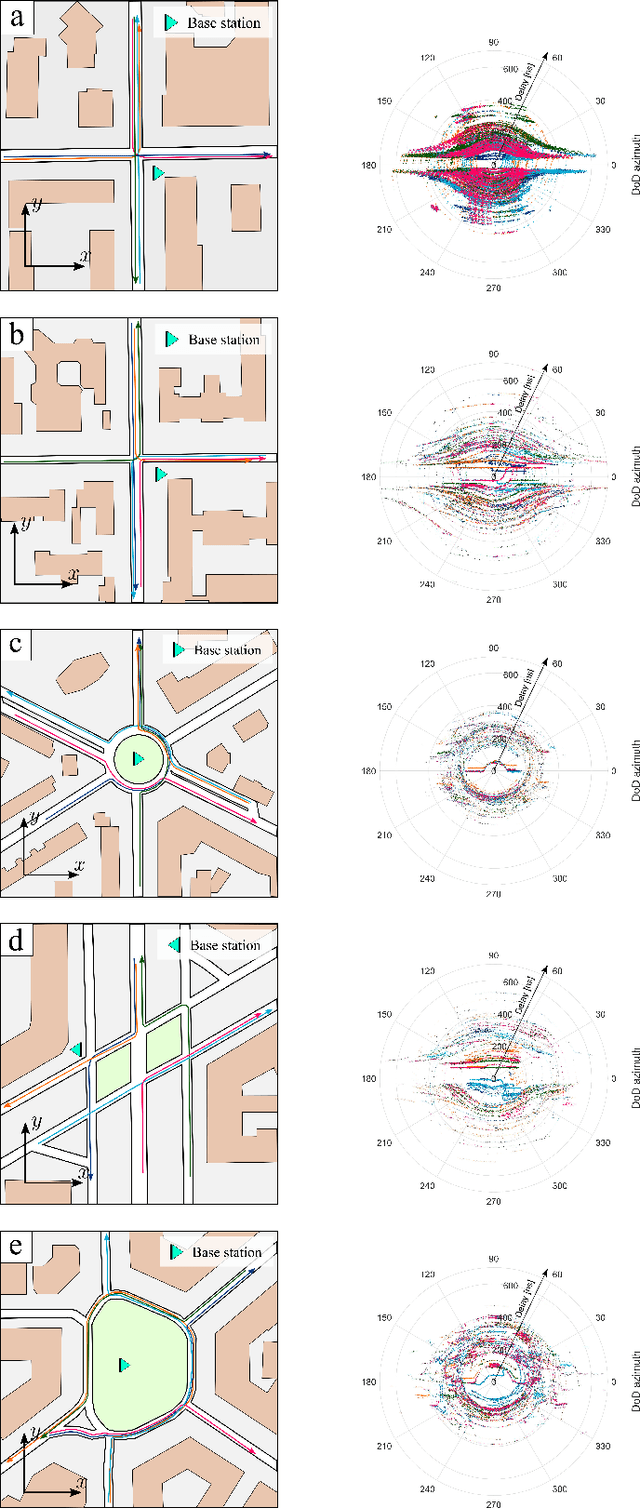
In the emerging high mobility Vehicle-to-Everything (V2X) communications using millimeter Wave (mmWave) and sub-THz, Multiple-Input Multiple-Output (MIMO) channel estimation is an extremely challenging task. At mmWaves/sub-THz frequencies, MIMO channels exhibit few leading paths in the space-time domain (i.e., directions or arrival/departure and delays). Algebraic Low-rank (LR) channel estimation exploits space-time channel sparsity through the computation of position-dependent MIMO channel eigenmodes leveraging recurrent training vehicle passages in the coverage cell. LR requires vehicles' geographical positions and tens to hundreds of training vehicles' passages for each position, leading to significant complexity and control signalling overhead. Here we design a DL-based LR channel estimation method to infer MIMO channel eigenmodes in V2X urban settings, starting from a single LS channel estimate and without needing vehicle's position information. Numerical results show that the proposed method attains comparable Mean Squared Error (MSE) performance as the position-based LR. Moreover, we show that the proposed model can be trained on a reference scenario and be effectively transferred to urban contexts with different space-time channel features, providing comparable MSE performance without an explicit transfer learning procedure. This result eases the deployment in arbitrary dense urban scenarios.
Position-agnostic Algebraic Estimation of 6G V2X MIMO Channels via Unsupervised Learning
Jul 26, 2021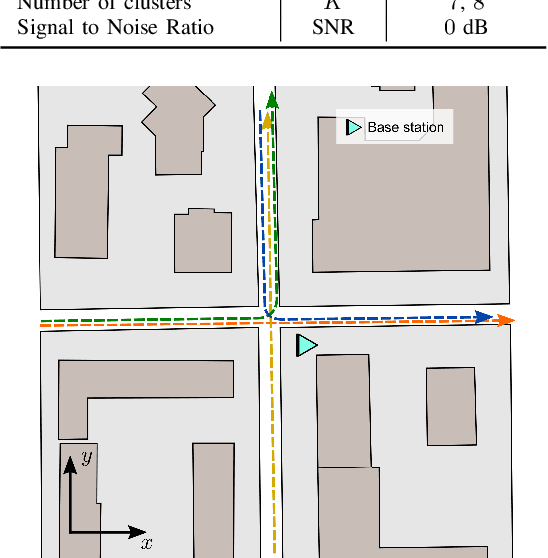
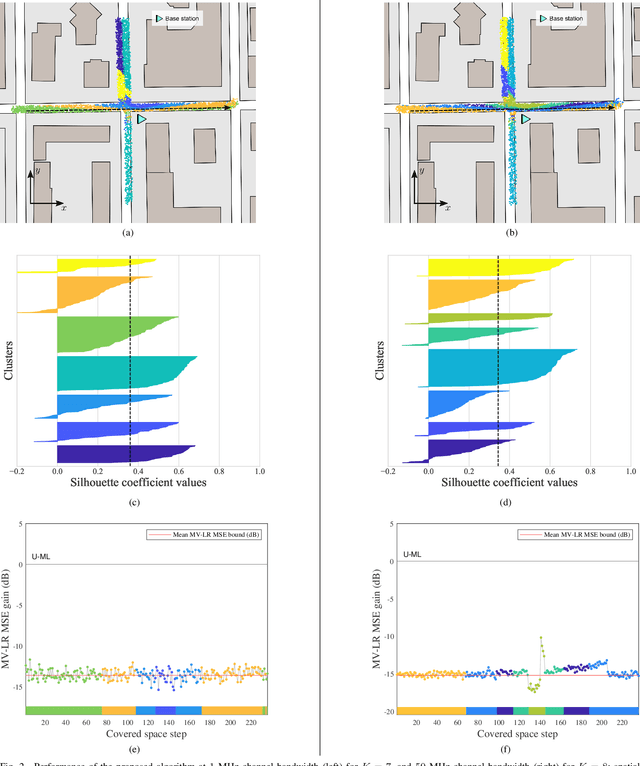
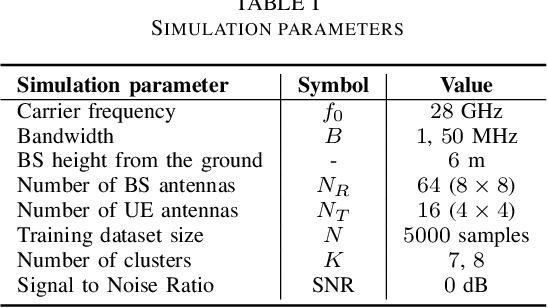
MIMO systems in the context of 6G Vehicle-to-Everything (V2X) will require an accurate channel knowledge to enable efficient communication. Standard channel estimation techniques, such as Unconstrained Maximum Likelihood (U-ML), are extremely noisy in massive MIMO settings, while structured approaches, e.g., compressed sensing, are suited to low-mobility scenarios and are sensitive to hardware impairments. We propose a novel Multi-Vehicular algebraic channel estimation method for 6G V2X based on unsupervised learning which exploits recurrent vehicle passages in typical urban settings. Multiple training sequences are clustered via K-medoids algorithm based on their \textit{algebraic similarity} to retrieve the MIMO channel eigenmodes, which can be used to improve the channel estimates. Numerical results show remarkable benefits of the proposed method in terms of Mean Squared Error (MSE) compared to standard U-ML solution (15 dB less).