 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTarget Classification for Integrated Sensing and Communication in Industrial Deployments
Dec 23, 2025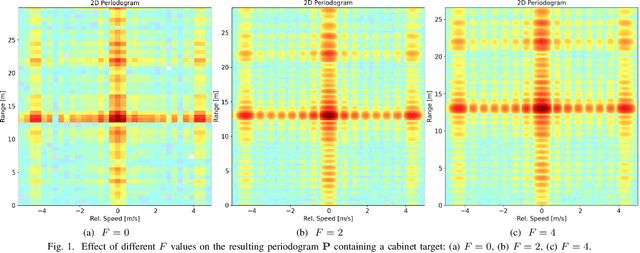
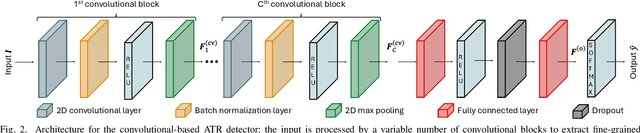
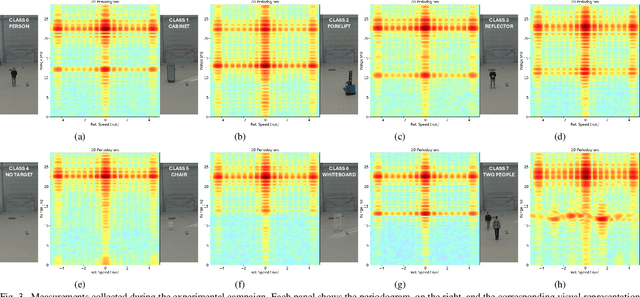
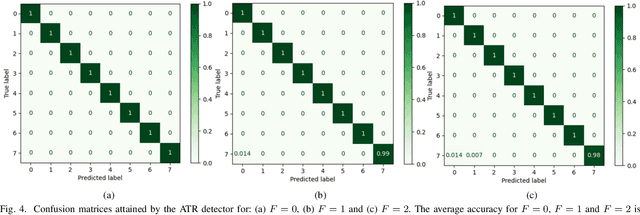
Integrated Sensing and Communication (ISAC) systems enable cellular networks to jointly operate as communication technology and sense the environment. While opportunities and potential performance have been largely investigated in simulations, few experimental works have showcased Automatic Target Recognition (ATR) effectiveness in a real-world deployment based on cellular radio units. To bridge this gap, this paper presents an initial study investigating the feasibility of ATR for ISAC. Our ATR solution uses a Deep Learning (DL)-based detector to infer the target class directly from the radar images generated by the ISAC system. The DL detector is evaluated with experimental data from a ISAC testbed based on commercially available mmWave radio units in the ARENA 2036 industrial research campus located in Stuttgart, Germany. Experimental results demonstrate accurate classification performance, demonstrating the feasibility of ATR ISAC with cellular hardware in our setup. We finally provide insights about the open generalization challenges, that will fuel future work on the topic.
Joint Travel Route Optimization Framework for Platooning
Apr 10, 2025Platooning represents an advanced driving technology designed to assist drivers in traffic convoys of varying lengths, enhancing road safety, reducing driver fatigue, and improving fuel efficiency. Sophisticated automated driving assistance systems have facilitated this innovation. Recent advancements in platooning emphasize cooperative mechanisms within both centralized and decentralized architectures enabled by vehicular communication technologies. This study introduces a cooperative route planning optimization framework aimed at promoting the adoption of platooning through a centralized platoon formation strategy at the system level. This approach is envisioned as a transitional phase from individual (ego) driving to fully collaborative driving. Additionally, this research formulates and incorporates travel cost metrics related to fuel consumption, driver fatigue, and travel time, considering regulatory constraints on consecutive driving durations. The performance of these cost metrics has been evaluated using Dijkstra's and A* shortest path algorithms within a network graph framework. The results indicate that the proposed architecture achieves an average cost improvement of 14 % compared to individual route planning for long road trips.
Deep Learning-based Cooperative LiDAR Sensing for Improved Vehicle Positioning
Feb 26, 2024Accurate positioning is known to be a fundamental requirement for the deployment of Connected Automated Vehicles (CAVs). To meet this need, a new emerging trend is represented by cooperative methods where vehicles fuse information coming from navigation and imaging sensors via Vehicle-to-Everything (V2X) communications for joint positioning and environmental perception. In line with this trend, this paper proposes a novel data-driven cooperative sensing framework, termed Cooperative LiDAR Sensing with Message Passing Neural Network (CLS-MPNN), where spatially-distributed vehicles collaborate in perceiving the environment via LiDAR sensors. Vehicles process their LiDAR point clouds using a Deep Neural Network (DNN), namely a 3D object detector, to identify and localize possible static objects present in the driving environment. Data are then aggregated by a centralized infrastructure that performs Data Association (DA) using a Message Passing Neural Network (MPNN) and runs the Implicit Cooperative Positioning (ICP) algorithm. The proposed approach is evaluated using two realistic driving scenarios generated by a high-fidelity automated driving simulator. The results show that CLS-MPNN outperforms a conventional non-cooperative localization algorithm based on Global Navigation Satellite System (GNSS) and a state-of-the-art cooperative Simultaneous Localization and Mapping (SLAM) method while approaching the performances of an oracle system with ideal sensing and perfect association.
A Tutorial on 5G Positioning
Nov 17, 2023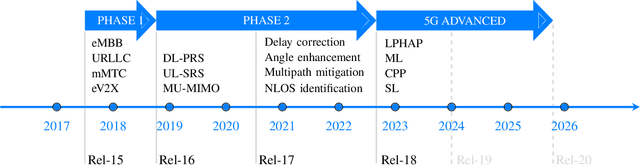



The widespread adoption of the fifth generation (5G) of cellular networks has brought new opportunities for localization-based services. High-precision positioning use cases and functionalities defined by the standards are drawing the interest of vertical industries. In the transition to the deployment, this paper aims to provide an in-depth tutorial on 5G positioning, summarizing the historical events that led to the standardization of cellular-based positioning, describing current and forthcoming releases of the Third Generation Partnership Project (3GPP) standard, and discussing about the major research trends. This paper is intended to represent an exhaustive guide for researchers and practitioners by providing fundamental notions on wireless localization, comprehensive definitions of measurements and architectures, examples of algorithms, and details on simulation approaches. Our approach aims to merge practical aspects of enabled use cases and related requirements with theoretical methodologies and fundamental bounds, allowing to understand the trade-off between system complexity and achievable, i.e., tangible, benefits of 5G positioning services. We also discuss about current limitations to be resolved for delivering accurate positioning solutions. We evaluate the performances of 3GPP Rel-16 positioning in outdoor and indoor environments, providing thorough analyses of the effect of changing the system configuration.
Cooperative Localization and Multitarget Tracking in Agent Networks with the Sum-Product Algorithm
Aug 05, 2021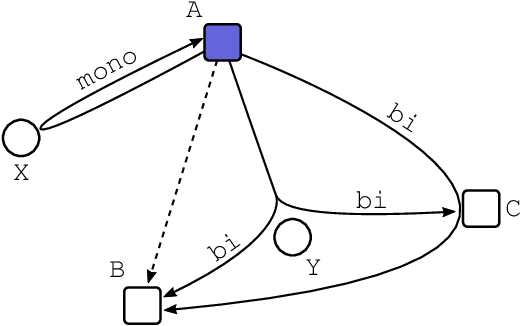
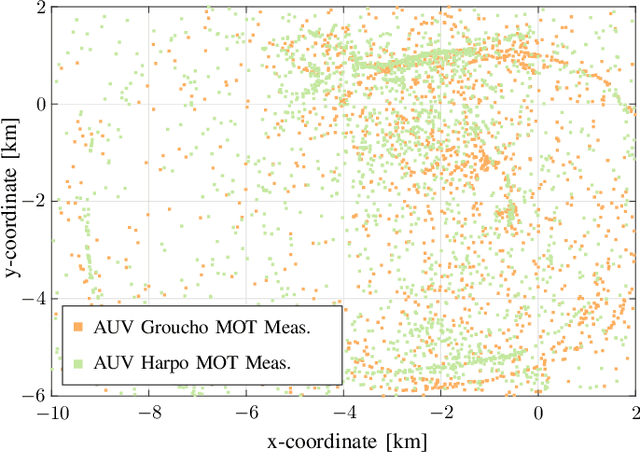
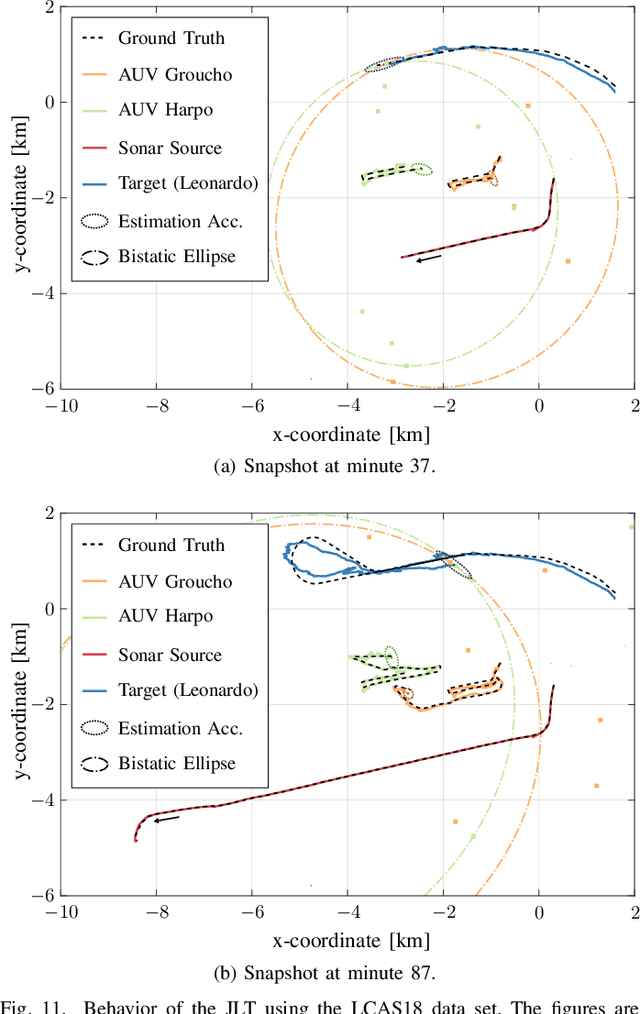
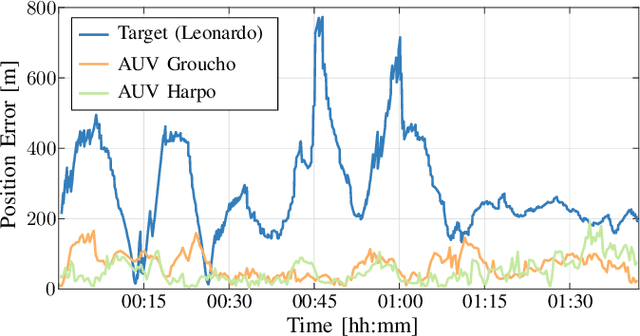
This paper addresses the problem of multitarget tracking using a network of sensing agents with unknown positions. Agents have to both localize themselves in the sensor network and, at the same time, perform multitarget tracking in the presence of clutter and target miss detection. These two problems are jointly resolved in a holistic approach where graph theory is used to describe the statistical relationships among agent states, target states, and observations. A scalable message passing scheme, based on the sum-product algorithm, enables to efficiently approximate the marginal posterior distributions of both agent and target states. The proposed solution is general enough to accommodate a full multistatic network configuration, with multiple transmitters and receivers. Numerical simulations show superior performance of the proposed joint approach with respect to the case in which cooperative self-localization and multitarget tracking are performed separately, as the former manages to extract valuable information from targets. Lastly, data acquired in 2018 by the NATO Science and Technology (STO) Centre for Maritime Research and Experimentation (CMRE) through a network of autonomous underwater vehicles demonstrates the effectiveness of the approach in practical applications.
Fastening the Initial Access in 5G NR Sidelink for 6G V2X Networks
Jun 10, 2021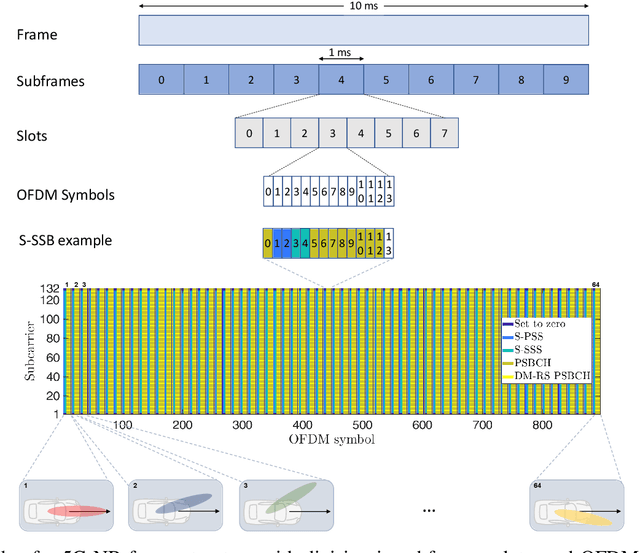
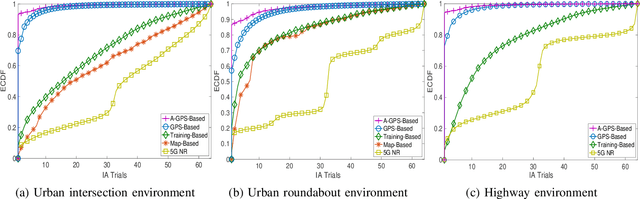
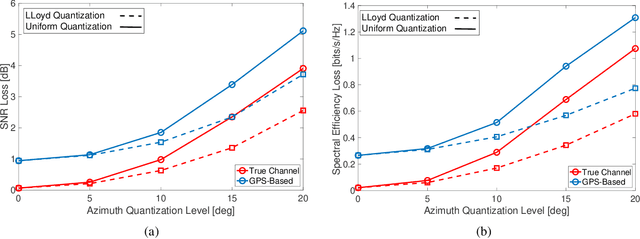
The ever-increasing demand for intelligent, automated, and connected mobility solutions pushes for the development of an innovative sixth Generation (6G) of cellular networks. A radical transformation on the physical layer of vehicular communications is planned, with a paradigm shift towards beam-based millimeter Waves or sub-Terahertz communications, which require precise beam pointing for guaranteeing the communication link, especially in high mobility. A key design aspect is a fast and proactive Initial Access (IA) algorithm to select the optimal beam to be used. In this work, we investigate alternative IA techniques to fasten the current fifth-generation (5G) standard, targeting an efficient 6G design. First, we discuss cooperative position-based schemes that rely on the position information. Then, motivated by the intuition of a non-uniform distribution of the communication directions due to road topology constraints, we design two Probabilistic Codebook (PCB) techniques of prioritized beams. In the first one, the PCBs are built leveraging past collected traffic information, while in the second one, we use the Hough Transform over the digital map to extract dominant road directions. We also show that the information coming from the angular probability distribution allows designing non-uniform codebook quantization, reducing the degradation of the performances compared to uniform one. Numerical simulation on realistic scenarios shows that PCBs-based beam selection outperforms the 5G standard in terms of the number of IA trials, with a performance comparable to position-based methods, without requiring the signaling of sensitive information.
Sensor-Aided Beamwidth and Power Control for Next Generation Vehicular Communications
Apr 08, 2021

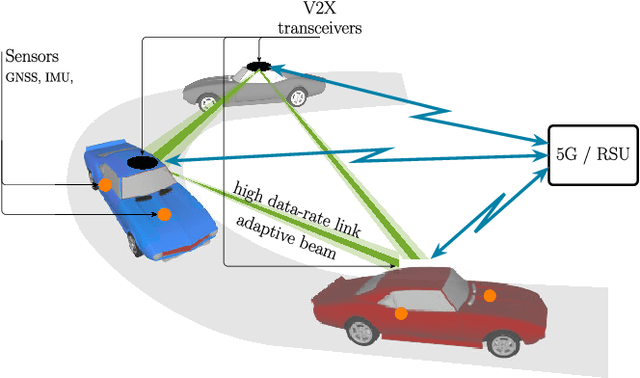
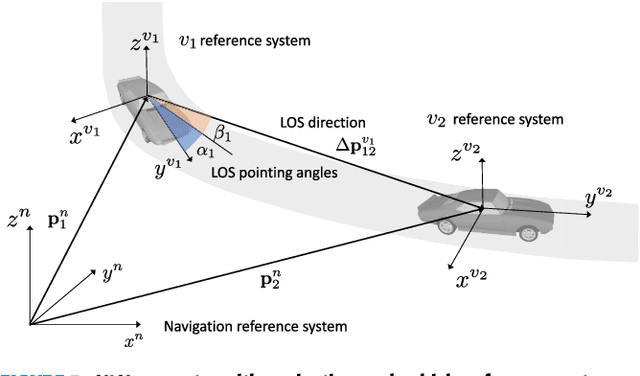
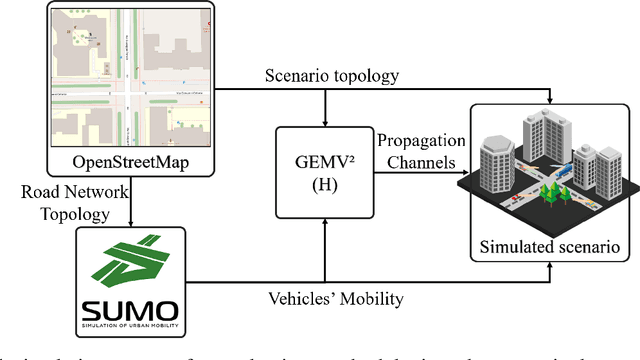
Ultra-reliable low-latency Vehicle-to-Everything (V2X) communications are needed to meet the extreme requirements of enhanced driving applications. Millimeter-Wave (24.25-52.6 GHz) or sub-THz (>100 GHz) V2X communications are a viable solution, provided that the highly collimated beams are kept aligned during vehicles' maneuverings. In this work, we propose a sensor-assisted dynamic Beamwidth and Power Control (BPC) system to counteract the detrimental effect of vehicle dynamics, exploiting data collected by on-board inertial and positioning sensors, mutually exchanged among vehicles over a parallel low-rate link, e.g., 5G New Radio (NR) Frequency Range 1 (FR1). The proposed BPC solution works on top of a sensor-aided Beam Alignment and Tracking (BAT) system, overcoming the limitations of fixed-beamwidth systems and optimizing the performance in challenging Vehicle-to-Vehicle (V2V) scenarios, even if extensions to Vehicle-to-Infrastructure (V2I) use-cases are feasible. We validate the sensor-assisted dynamic BPC on real trajectories and sensors' data collected by a dedicated experimental campaign. The goal is to show the advantages of the proposed BPC strategy in a high data-rate Line-Of-Sight (LOS) V2V context, and to outline the requirements in terms of sensors' sampling time and accuracy, along with the end-to-end latency on the control channel.