 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensor-Aided Beamwidth and Power Control for Next Generation Vehicular Communications
Paper and Code
Apr 08, 2021

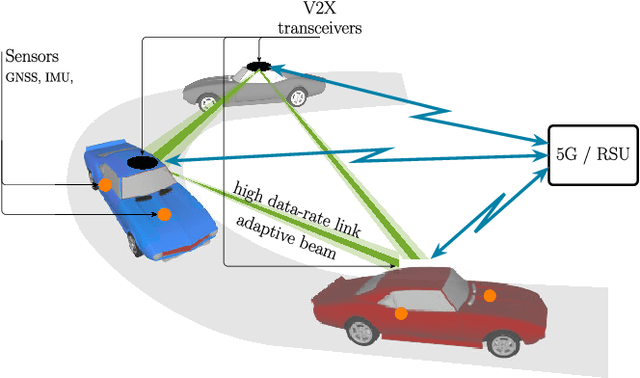
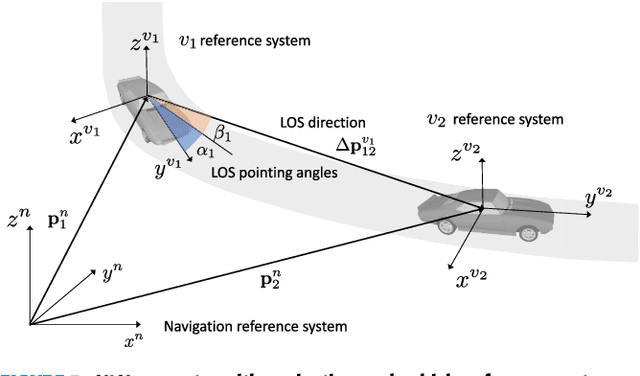
Ultra-reliable low-latency Vehicle-to-Everything (V2X) communications are needed to meet the extreme requirements of enhanced driving applications. Millimeter-Wave (24.25-52.6 GHz) or sub-THz (>100 GHz) V2X communications are a viable solution, provided that the highly collimated beams are kept aligned during vehicles' maneuverings. In this work, we propose a sensor-assisted dynamic Beamwidth and Power Control (BPC) system to counteract the detrimental effect of vehicle dynamics, exploiting data collected by on-board inertial and positioning sensors, mutually exchanged among vehicles over a parallel low-rate link, e.g., 5G New Radio (NR) Frequency Range 1 (FR1). The proposed BPC solution works on top of a sensor-aided Beam Alignment and Tracking (BAT) system, overcoming the limitations of fixed-beamwidth systems and optimizing the performance in challenging Vehicle-to-Vehicle (V2V) scenarios, even if extensions to Vehicle-to-Infrastructure (V2I) use-cases are feasible. We validate the sensor-assisted dynamic BPC on real trajectories and sensors' data collected by a dedicated experimental campaign. The goal is to show the advantages of the proposed BPC strategy in a high data-rate Line-Of-Sight (LOS) V2V context, and to outline the requirements in terms of sensors' sampling time and accuracy, along with the end-to-end latency on the control channel.