 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-supervised Contrastive Learning for 6G UM-MIMO THz Communications: Improving Robustness Under Imperfect CSI
Jan 21, 2024



This paper investigates the potential of contrastive learning in 6G ultra-massive multiple-input multiple-output (UM-MIMO) communication systems, specifically focusing on hybrid beamforming under imperfect channel state information (CSI) conditions at THz. UM-MIMO systems are promising for future 6G wireless communication networks due to their high spectral efficiency and capacity. The accuracy of CSI significantly influences the performance of UM-MIMO systems. However, acquiring perfect CSI is challenging due to various practical constraints such as channel estimation errors, feedback delays, and hardware imperfections. To address this issue, we propose a novel self-supervised contrastive learning-based approach for hybrid beamforming, which is robust against imperfect CSI. We demonstrate the power of contrastive learning to tackle the challenges posed by imperfect CSI and show that our proposed method results in improved system performance in terms of achievable rate compared to traditional methods.
Fusion of Sensor Measurements and Target-Provided Information in Multitarget Tracking
Nov 26, 2021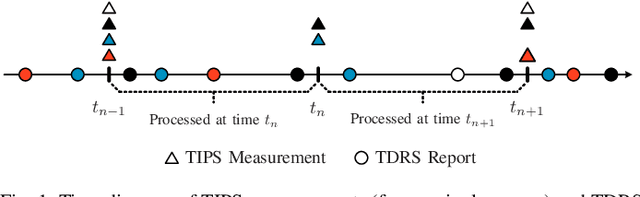
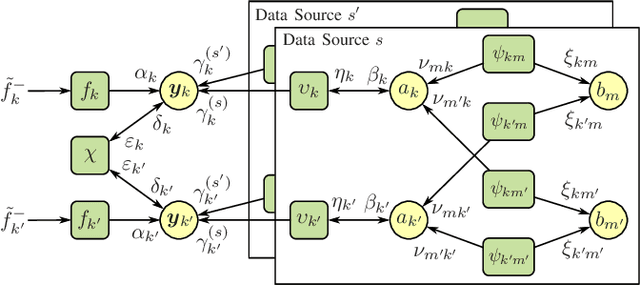
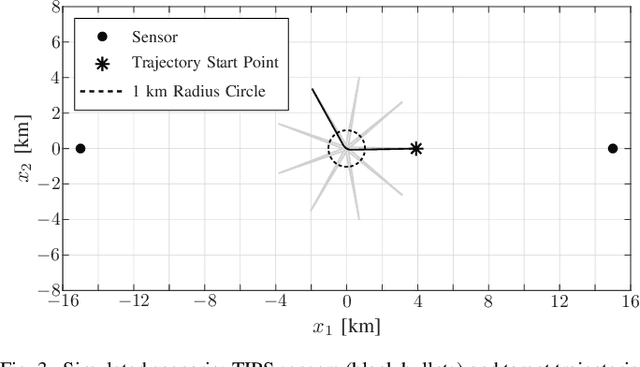
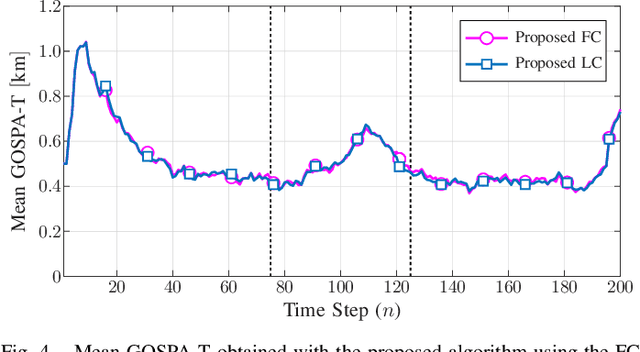
Tracking multiple time-varying states based on heterogeneous observations is a key problem in many applications. Here, we develop a statistical model and algorithm for tracking an unknown number of targets based on the probabilistic fusion of observations from two classes of data sources. The first class, referred to as target-independent perception systems (TIPSs), consists of sensors that periodically produce noisy measurements of targets without requiring target cooperation. The second class, referred to as target-dependent reporting systems (TDRSs), relies on cooperative targets that report noisy measurements of their state and their identity. We present a joint TIPS-TDRS observation model that accounts for observation-origin uncertainty, missed detections, false alarms, and asynchronicity. We then establish a factor graph that represents this observation model along with a state evolution model including target identities. Finally, by executing the sum-product algorithm on that factor graph, we obtain a scalable multitarget tracking algorithm with inherent TIPS-TDRS fusion. The performance of the proposed algorithm is evaluated using simulated data as well as real data from a maritime surveillance experiment.
Cooperative Localization in Massive Networks
Oct 15, 2021
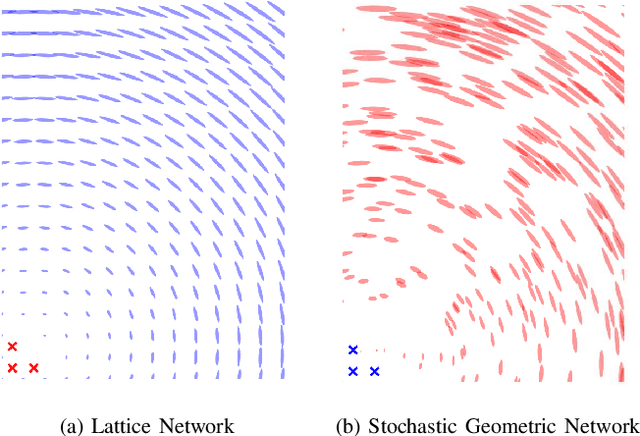
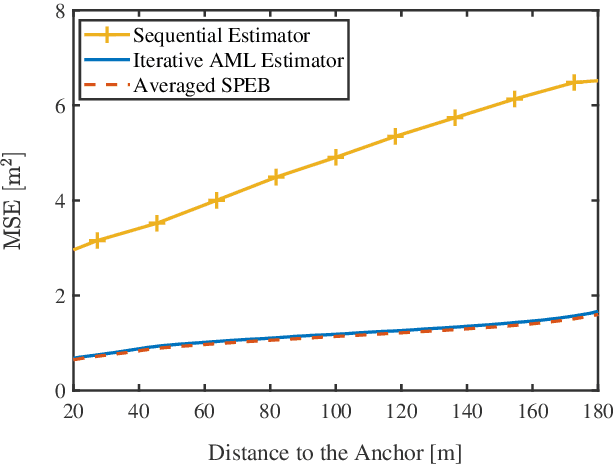
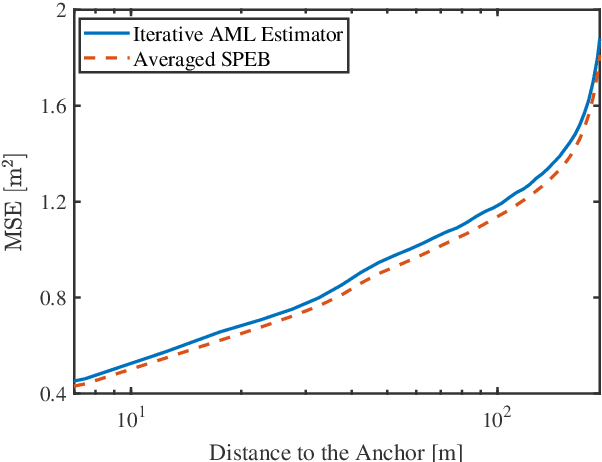
Network localization is capable of providing accurate and ubiquitous position information for numerous wireless applications. This paper studies the accuracy of cooperative network localization in large-scale wireless networks. Based on a decomposition of the equivalent Fisher information matrix (EFIM), we develop a random-walk-inspired approach for the analysis of EFIM, and propose a position information routing interpretation of cooperative network localization. Using this approach, we show that in large lattice and stochastic geometric networks, when anchors are uniformly distributed, the average localization error of agents grows logarithmically with the reciprocal of anchor density in an asymptotic regime. The results are further illustrated using numerical examples.
Cooperative Localization and Multitarget Tracking in Agent Networks with the Sum-Product Algorithm
Aug 05, 2021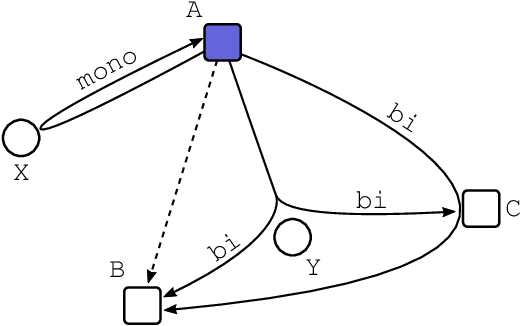
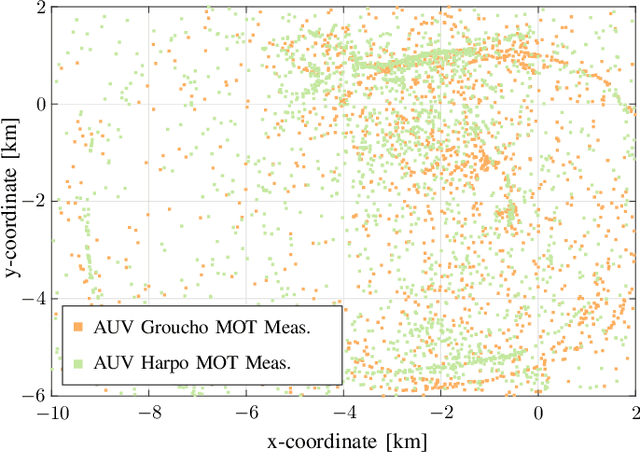
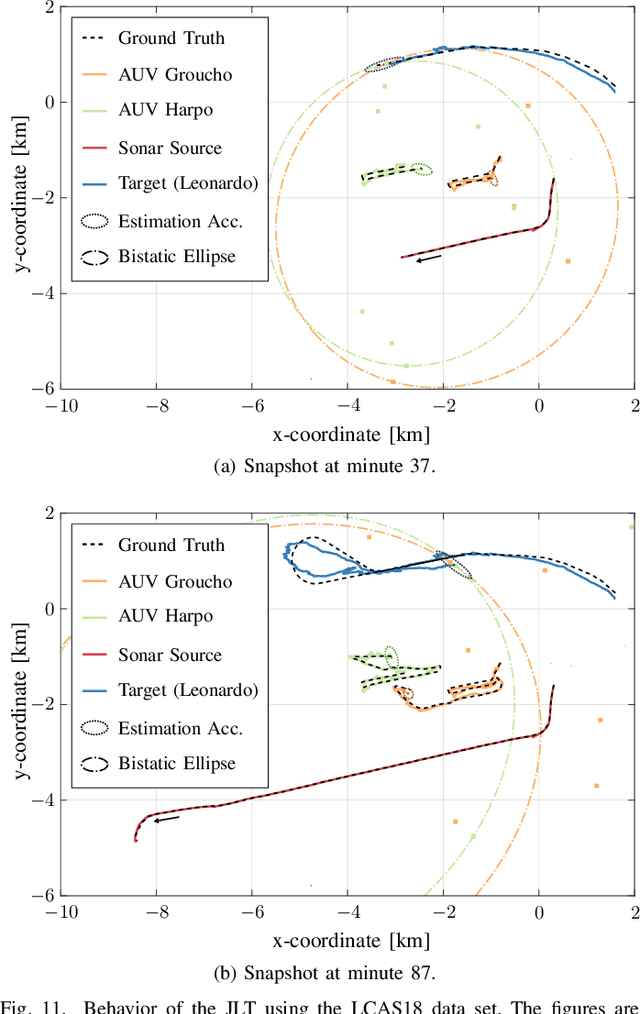
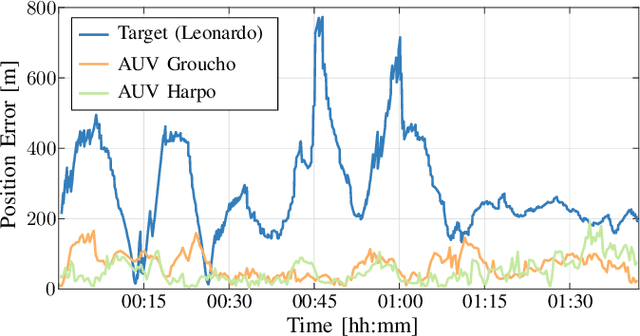
This paper addresses the problem of multitarget tracking using a network of sensing agents with unknown positions. Agents have to both localize themselves in the sensor network and, at the same time, perform multitarget tracking in the presence of clutter and target miss detection. These two problems are jointly resolved in a holistic approach where graph theory is used to describe the statistical relationships among agent states, target states, and observations. A scalable message passing scheme, based on the sum-product algorithm, enables to efficiently approximate the marginal posterior distributions of both agent and target states. The proposed solution is general enough to accommodate a full multistatic network configuration, with multiple transmitters and receivers. Numerical simulations show superior performance of the proposed joint approach with respect to the case in which cooperative self-localization and multitarget tracking are performed separately, as the former manages to extract valuable information from targets. Lastly, data acquired in 2018 by the NATO Science and Technology (STO) Centre for Maritime Research and Experimentation (CMRE) through a network of autonomous underwater vehicles demonstrates the effectiveness of the approach in practical applications.
Cramér-Rao Bounds for Near-Field Localization
Apr 30, 2021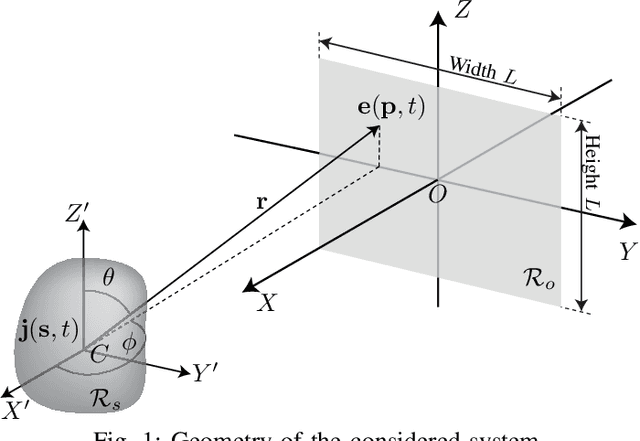

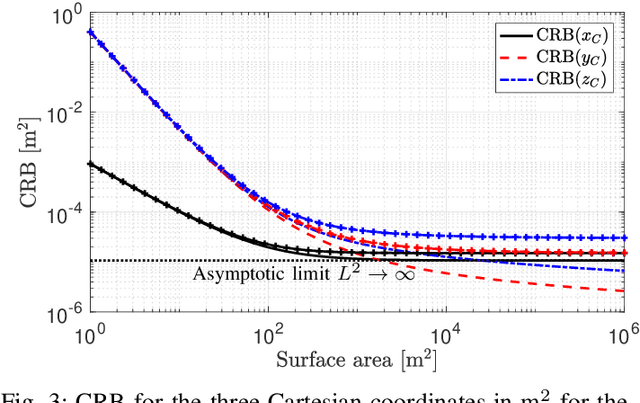
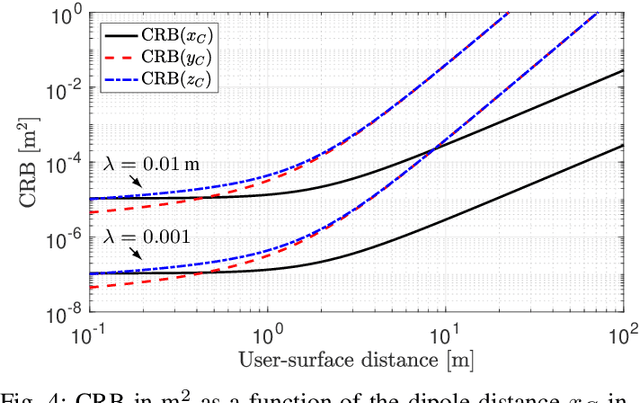
Multiple antenna arrays play a key role in wireless networks for communications but also localization and sensing. The use of large antenna arrays pushes towards the near-field propagation regime in which the wavefront is no longer plane but spherical. This allows to infer the position and orientation of an arbitrary source from the received signal without the need of using multiple anchor nodes. To understand the fundamental limits of large antenna arrays for localization, this paper fusions wave propagation theory with estimation theory, and computes the Cram\'er-Rao Bound (CRB) for the estimation of the three Cartesian coordinates of the source on the basis of the electromagnetic vector field, observed over a rectangular surface area. To simplify the analysis, we assume that the source is a dipole, whose center is located on the line perpendicular to the surface center, with an orientation a priori known. Numerical and asymptotic results are given to quantify the CRBs, and to gain insights into the effect of various system parameters on the ultimate estimation accuracy. It turns out that surfaces of practical size may guarantee a centimeter-level accuracy in the mmWave bands.
A Belief Propagation Algorithm for Multipath-Based SLAM
Dec 10, 2018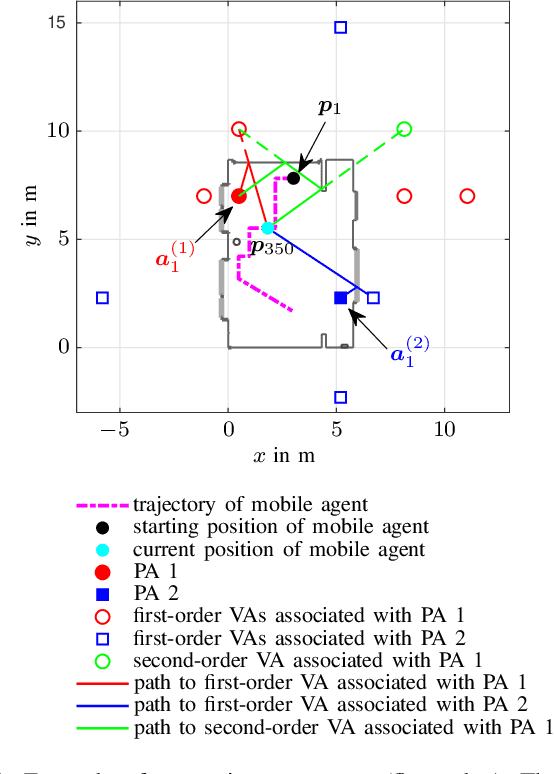
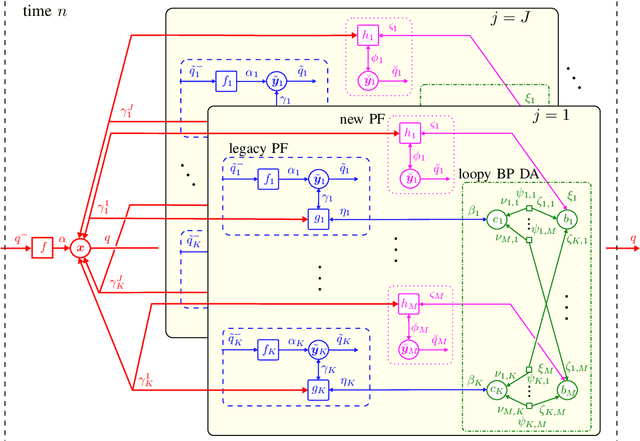
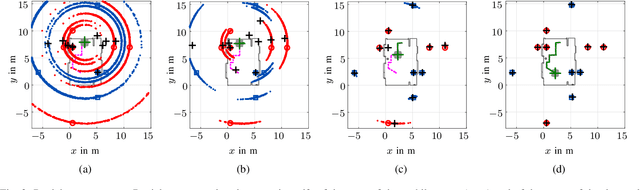
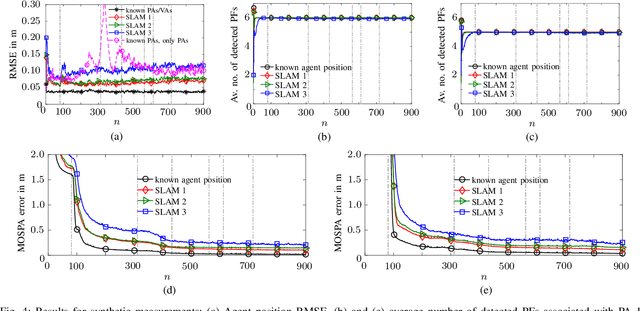
We present a simultaneous localization and mapping (SLAM) algorithm that is based on radio signals and the association of specular multipath components (MPCs) with geometric features. Especially in indoor scenarios, robust localization from radio signals is challenging due to diffuse multipath propagation, unknown MPC-feature association, and limited visibility of features. In our approach, specular reflections at flat surfaces are described in terms of virtual anchors (VAs) that are mirror images of the physical anchors (PAs). The positions of these VAs and possibly also of the PAs are unknown. We develop a Bayesian model of the SLAM problem including the unknown MPC-VA/PA association. We represent this model by a factor graph, which enables the use of the belief propagation (BP) scheme for efficient marginalization of the joint posterior distribution. The resulting BP-based SLAM algorithm detects the VAs associated with the PAs and estimates jointly the time-varying position of the mobile agent and the positions of the VAs and possibly also of the PAs, thereby leveraging the MPCs in the radio signal for improved accuracy and robustness of agent localization. A core aspect of the algorithm is BP-based probabilistic MPC-VA/PA association. Moreover, for improved initialization of new VA positions, the states of unobserved potential VAs are modeled as a random finite set and propagated in time by means of a "zero-measurement" probability hypothesis density filter. The proposed BP-based SLAM algorithm has a low computational complexity and scales well in all relevant system parameters. Experimental results using both synthetically generated measurements and real ultra-wideband radio signals demonstrate the excellent performance of the algorithm in challenging indoor environments.